




RPC全称是远程过程调用(Remote Procedure Call),在分布式系统中,可以在客户机上调用服务器上的服务。
RPC给我们解决了这些问题:
- 通讯问题
- 寻址问题
- 数据序列化与反序列化
虽然HTTP接口也可以进行远程服务调用,但由于RPC是由TCP协议支持的(也有基于HTTP协议的RPC框架),效率更高,并且RPC一般有注册中心,可以有丰富的监控管理,还可以支持长连接,所以大型企业一般用RPC来进行远程服务调用。
RPC框架结构如下:
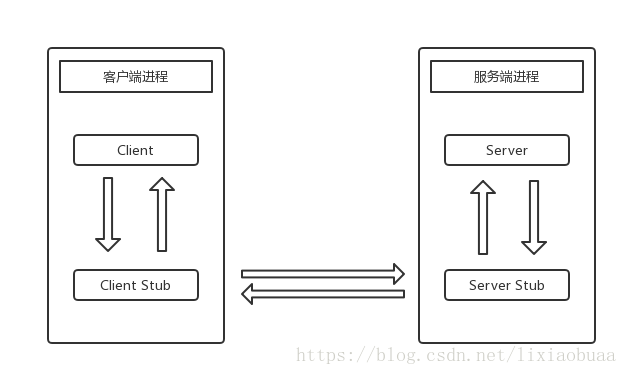
客户端进程调用Client Stub对象,Client Stub将调用信息发送到Server Stub对象,由服务器进程调用服务器上的本地方法,将结果传给Server Stub对象,Server Stub对象将结果返回给Client Stub对象,再返回给客户端进程。至此,客户端进程就像调用本地方法一样调用了服务器上的方法。
常用RPC框架有:
- Dubbo
Dubbo是阿里巴巴集团开源的一个分布式服务框架,致力于提供高性能和透明化的RPC远程服务调用方案 - Motan
新浪微博开源的Java框架 - gRPC
Google开发的高性能、通用的开源RPC框架,其由Google主要面向移动应用开发并基于HTTP/2协议标准而设计,基于ProtoBuf(Protocol Buffers)序列化协议开发,且支持众多开发语言

















 905
905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









