







 本文介绍如何使用Arduino控制舵机,并通过实例演示了舵机角度控制及超声波测距的应用。涉及Arduino编程、舵机基本操作及超声波模块使用。
本文介绍如何使用Arduino控制舵机,并通过实例演示了舵机角度控制及超声波测距的应用。涉及Arduino编程、舵机基本操作及超声波模块使用。
1.attach(接口)——设定舵机的接口,只有9或10接口可利用
2.write(角度)——用于设定舵机旋转角度的语句,可设定的角度范围是0°到180°
3.read(读取)——用于读取舵机角度的语句,可理解为读取最后一条write( )命令中的值
4.attached( )——判断舵机参数是否已发送到舵机所在的接口
5.detach( )——使舵机与其接口分离,该接口(9或10)可继续被用作PWM接口
注:以上语句的书写格式均为“舵机变量名.具体语句()”例如:myservo.attach(9)。
1) 说明:。
舵机的旋转不像普通电机那样只是转圈圈,它可以根据你的指令旋转到0至180度之间的任意角度然后精准的停下来,常用于控制机器人。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的。需要使用Arduino上的PWM口控制(数字前带~的),Arduino 的驱动能力有限,所以当需要控制1 个以上的舵机时需要外接电源。一个机器人经常需要很多个舵机同时工作,此时需要加一个舵机控制板,舵机控制板本身是一个单片机,它不但能接16/24/32个舵机,同时也简化了舵机操作命令。
下例中使用的是9g的小舵机,用arduino板上的5V供电,大的舵机有的需要外部供电才能驱动,外接电源时需要将降到舵机指定的电压,否则会烧坏舵机。
2) 硬件:
舵机SG90,Arduino uno,杜邦线
3) 接线:
GND(棕色)接 Arduino GND
PWM(橙色)接 Arduino Digital 10
VCC(红色)接 Arduino 5V
arduino代码:
#include <Servo.h>.
const int trigPin = 10;
const int echoPin = 11;
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
myServo.attach(12);
}
void loop() {
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance= duration*0.034/2;
return distance;
}
processing代码:
import processing.serial.*;
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1136, 768); //这个分辨率自己根据你的电脑的配置和显示屏幕配置进行更改。别逞强,我的渣渣笔记本就不能1080p
smooth();
myPort = new Serial(this,"COM3", 9600);//这个串口号一定要更改。我就做个好人,帮你们改为com3吧。好人注,,,
myPort.bufferUntil('.');
}
void draw() {
fill(98,245,31);
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31);
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(",");
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance=int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074);
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074);
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance=iDistance*((height-height*0.1666)*0.025);
if(iDistance<40){
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074);
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle)));
popMatrix();
}
void drawText() {
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text("Object: " + noObject, width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +"cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
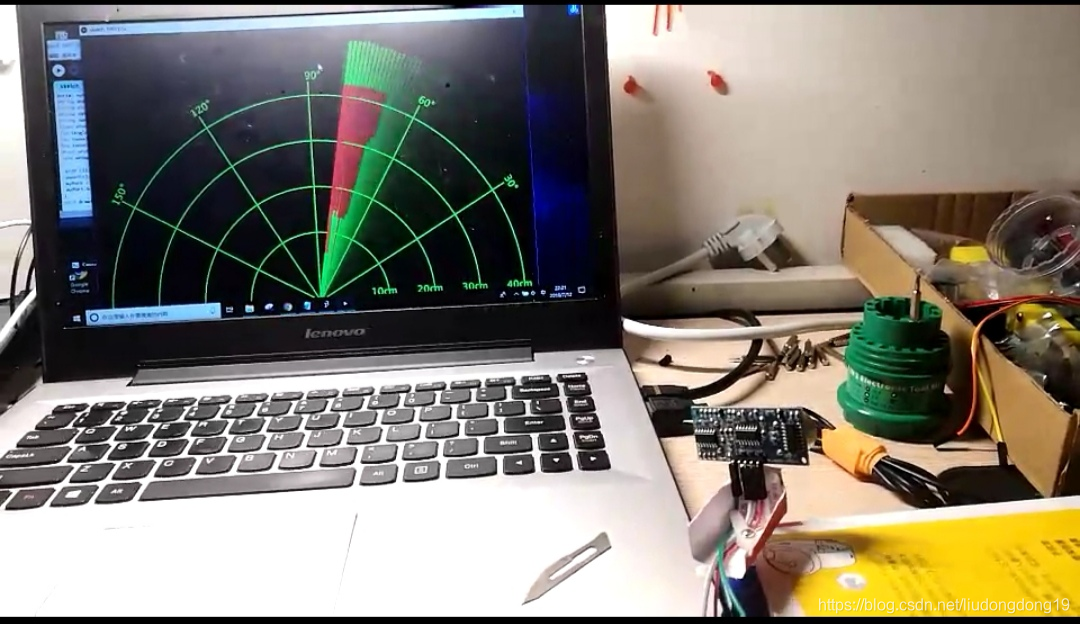
运行效果:
学习视频:https://www.youtube.com/watch?v=kQRYIH2HwfY

















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









