




java基础
1.java的基本概念
1.1java的由来
B->KB->MB
Sun 爪哇 Java
1.2java的版本
JavaSE:Java Standard Editon java 的标准版(第一和第二阶段学习)
JavaEE: Java Enterprise Edition java 的企业版(第三阶段 服务器中部署)
JavaMe: Java Micro Edition java的微缩版(Android 生态 google)
1.3java的特点
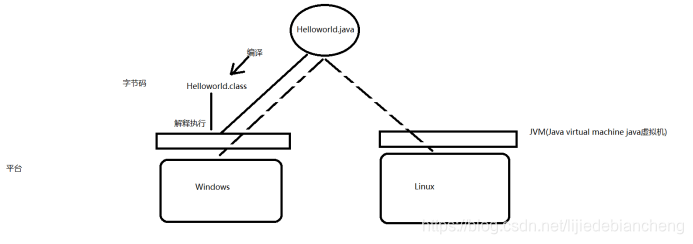
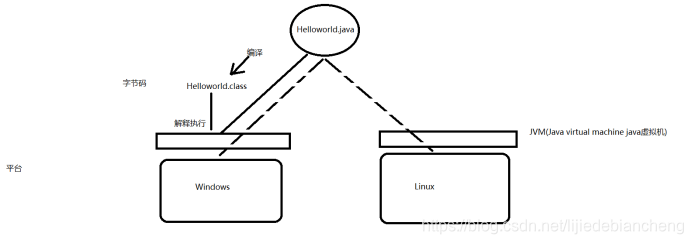
- 跨平台(一次编译,到处运行)
java 文件->class文件
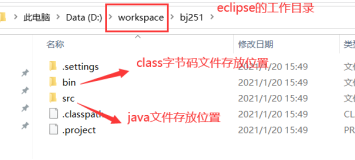
所以一个java文件的执行需要两步,编译和解释执行
- 安全性
- 简单(参照C)C–>C+±->C# java1.5
- 多线程(Thread)
- 健壮性(500,异常处理)
1.4虚拟机
编译:jdk(java develop kit java 开发工具包)
执行:jre(java runtime environment java 运行时环境)
执行编译过程
D:\Program Files\Java\jre\bin> javac Helloworld.java
当前目录下生成Helloworld.class 字节码文件
执行执行过程
D:\Program Files\Java\jre\bin> java Helloworld
如果出现中文乱码: 字符编码不一致导致(文本和控制台的编码)
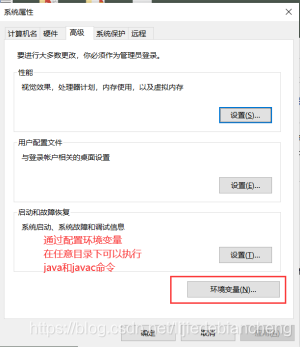
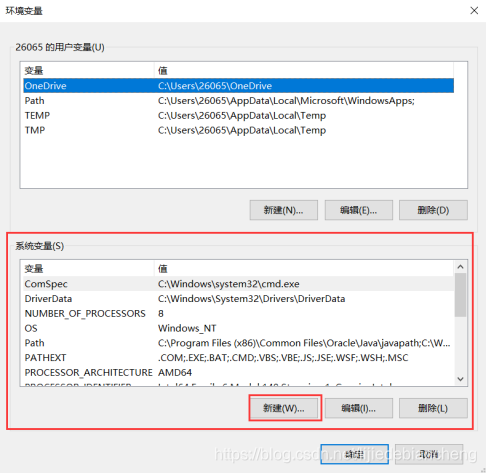
1.5关于windows系统中的环境变量的配置:
通过配置环境变量, 能在任意目录下执行java.exe和javac.exe
有三个变量组成:
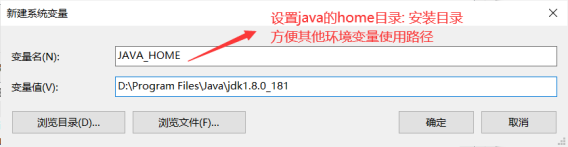
JAVA_HOME
D:\Program Files\Java\jdk1.8.0_181
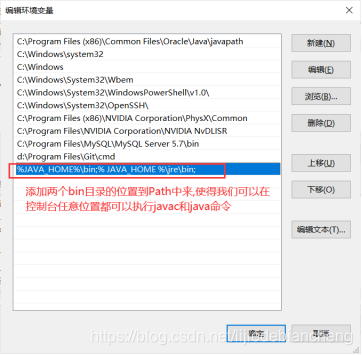
path中追加:
%JAVA_HOME%\bin;%JAVA_HOME%\jre\bin;
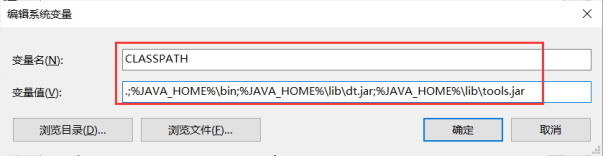
CLASSPATH
“.;%JAVA_HOME%\bin;%JAVA_HOME%\lib\dt.jar;%JAVA_HOME%\lib\tools.jar”
配置方法:
配置JAVA_HOME
在Path中添加:
配置CLASSPATH:
2.java的语法基础
注释
定义:
写在程序中但不参与编译的内容
通俗的讲: 注释的内容是给人(程序猿)看
用法:
用于给类和方法/变量程序中的内容添加描述
实现的方法:
单行注释: // 快捷键(ctrl+/)
多行注释: /* …. / 快捷键(ctrl+shift+/)
文档注释 /* …. */ 通常使用在类和方法前用于描述作用,且在生成的文档中要被读取
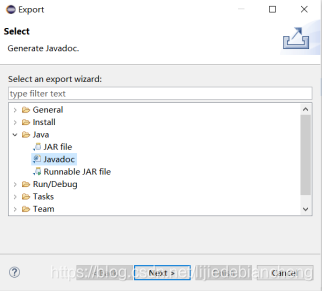
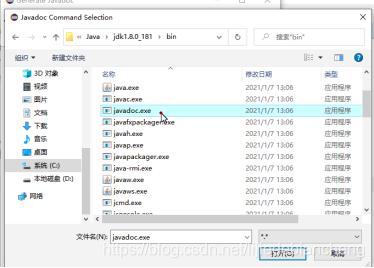
Eclipse中生成javadoc的方法

变量和数据类型
变量: 程序中用于装载数据的容器
作用: 程序中最基本的单元
特点: 可以装载数据,且可以被改变,但只能存放一份
语法:
声明: 数据类型 变量名;
赋值: 变量名 = 值 ; =表示赋值操作(运算) , 值必须和声明的数据类型匹配
使用(调用):
数据类型: java提供了8种基本数据类型 (内容主要在TypeDemo.java文件注释中详细讲解)
整数类型(4个)
byte int short long
小数(2个)
float double
字符类型
char
布尔类型
boolean

















 3599
3599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









