




 本文记录了在群晖DSM中安装和配置autoremove-torrent的过程,用于自动管理transmission和qbittorrent的种子,避免手动删除的低效。通过Docker安装,设置环境变量和删除策略,确保硬盘空间的有效利用。建议先进行模拟删除测试,以防止误删。
本文记录了在群晖DSM中安装和配置autoremove-torrent的过程,用于自动管理transmission和qbittorrent的种子,避免手动删除的低效。通过Docker安装,设置环境变量和删除策略,确保硬盘空间的有效利用。建议先进行模拟删除测试,以防止误删。
安装完成flexget以后,可以通过RSS进行自动寻找free种子进行下载了,但是随着保种越来越多,硬盘很快就爆了,就需要手动删除一些种子来减少保种数,毕竟每个人的硬盘空间都是有限的,不可能无限制的保种。在经过几天手动删除以后,发现效率太低了,于是便找到了这个自动删除软件。他可以查询当前transmisson和qbittorrent中的当前信息,并根据配置进行自动删除,需要注意的是它对qbittorrent支持度比较高,各项信息都可以完整获取到,但是transmisson就不太好,只能获取到下载时间等几项有限信息。
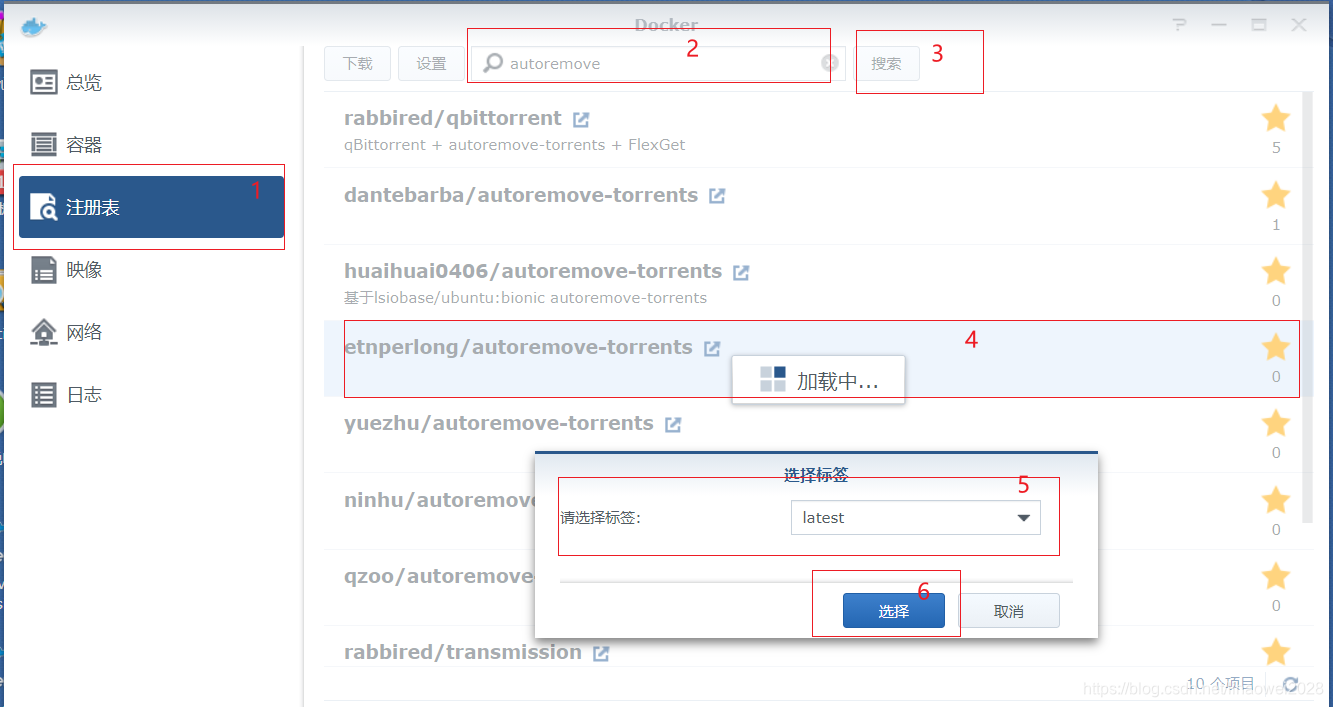
言归正传,下面我们同样通过docker来安装autoremove,首先在注册表中搜索autoremvoe,选择第四项(因为这里我是下载的第四项,并不是说其他的不能用,大家也可以下载其他镜像进行尝试),然后选择最新版本进行下载
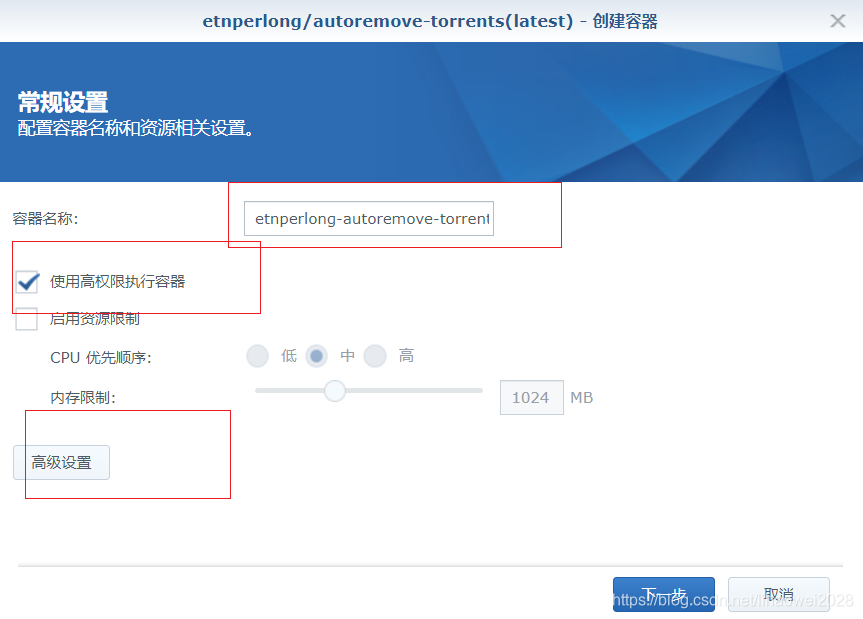
下载完成后,双击打开进行设置,同样设置名称,使用高权限执行,点击高级设置
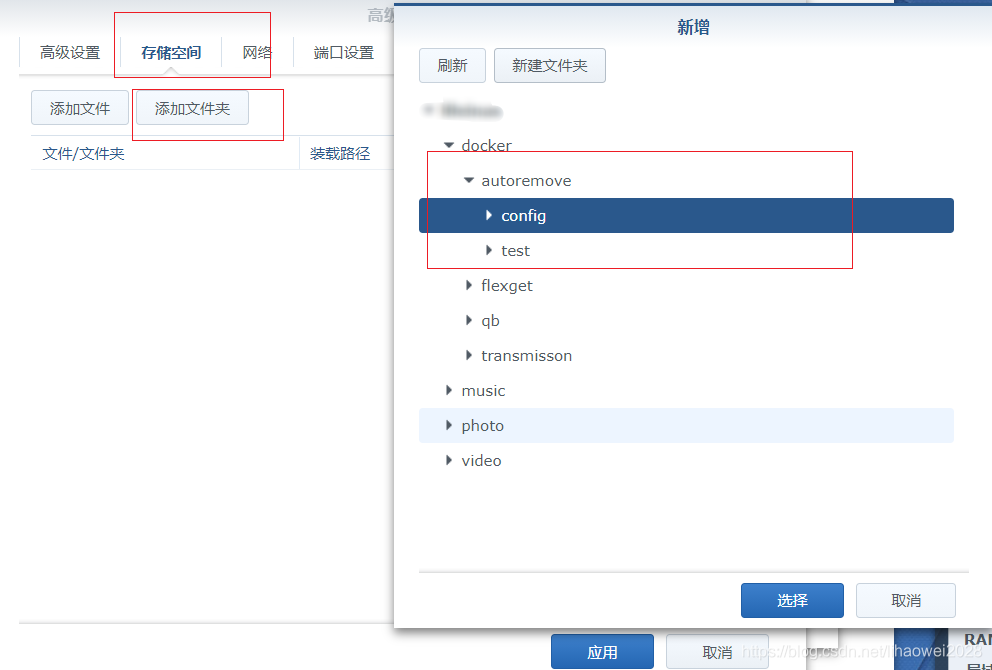
在打开的高级设置中,点击存储空间选项卡,添加文件夹,新建如图文件夹
配置如下图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









