




1、PID原理
PID(Proportional-Integral-Derivative)控制 是一种经典的闭环反馈控制算法,广泛应用于工业控制、机器人、自动化系统等领域。其核心是通过误差的比例、积分和微分三个环节的组合,调整系统输出,使被控量(如温度、速度、位置等)快速、稳定地达到目标值。
PID 控制器结构
PID 控制器的输出由三部分组成:
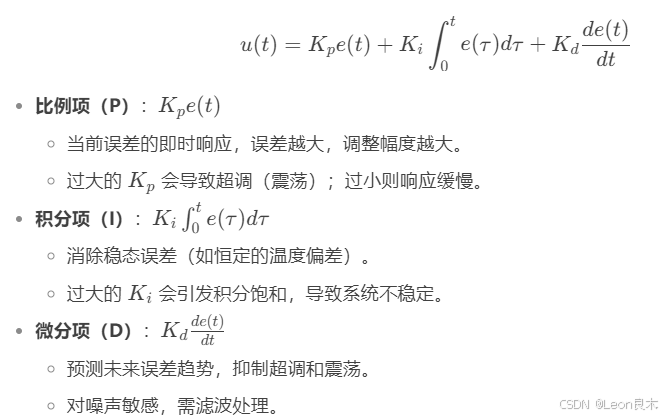
PID 调节实例
温度控制系统
-
目标:将水温稳定在 50°C。
-
调节过程:
-
比例控制(P):增大 Kp 使水温快速接近目标,但可能出现超调。
-
加入积分(I):消除稳态误差(如恒定的 2°C 偏差)。
-
加入微分(D):抑制超调,平滑温度变化。
-
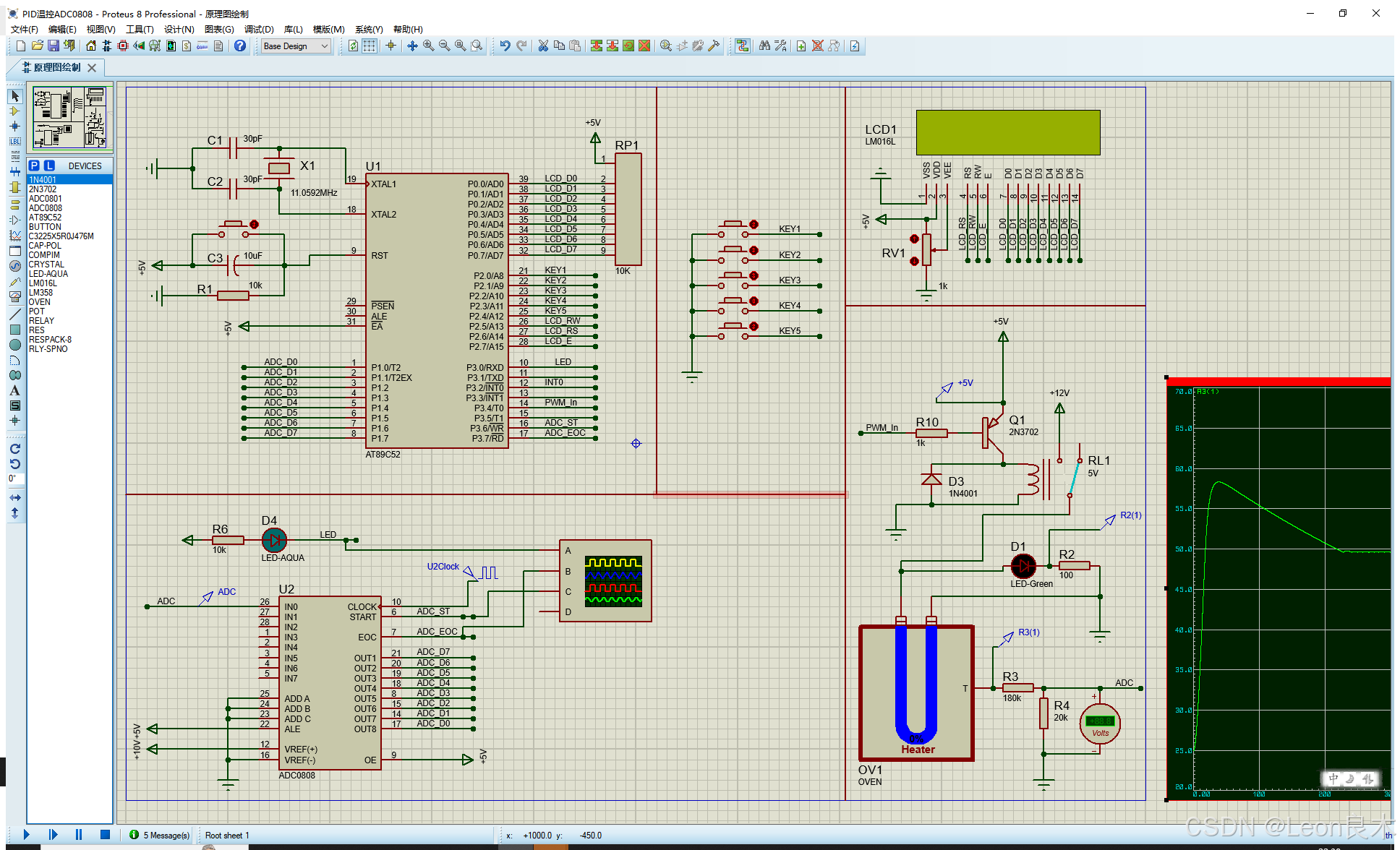
2、硬件结构
该硬件系统使用proteus软件进行搭建与仿真。如下图。
 3、C语言程序部分
3、C语言程序部分
,本次编程使用模块化编程,项目树如下:
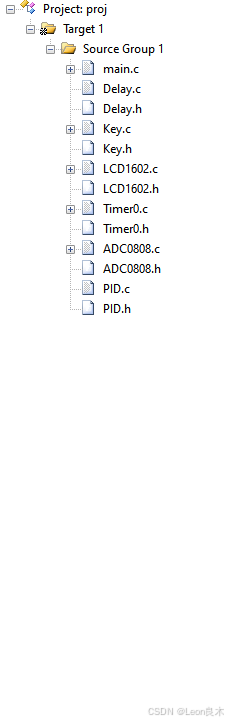
以下仅列举关键代码
a、PID.c
#define uchar unsigned char
#define uint unsigned int
float uk ,uk1 ,duk ;//声明目前总偏差值变量、之后偏差值总变量、偏差值总变量
typedef struct PID_Para
{
float Kp;//比例系数
float Ki;//积分增益
float Kd;//微分增益
int Err;//误差
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2933
2933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









