<?xml version="1.0"?>
<launch>
<node name="static_path" type="static_path_node" pkg="path_planner" output="screen" respawn="true">
<param name="use_map_topic" value="map" />
<param name="use_cost_map" value="false" />
<param name="map_service" value="map" />
<param name="map_topic" value="map" />
<param name="resolution" value="0.05" />
<!-- forward and backward test -->
<!-- <rosparam param="segments">[[1.0], [1.57, 1.0], [-2.0], [-1.5707963, 1.0]]</rosparam> -->
<!-- S-curve-->
<!-- <rosparam param="segments">[[1.0], [1.57, 1.0], [0.3], [-3.141592, 1.0], [0.7], [3.141592, 1.0], [1.5]]</rosparam> -->
<!-- <rosparam param="segments">[[-1.5707963, 2.17] ,[3.85], [-1.5707963, 1.7] ,[0.97], [-1.5707963, 1.7] ,[0.75], [-2.5, 0.7] ,[0.4], [2.5, 0.9] ,[0.2]]</rosparam> -->
<!-- xf<rosparam param="segments">[[1.935],[-1.5707963,0.15],[1.83],[-1.5707963,0.15],[1.83],[-1.5707963,0.15],[1.68],[-1.5707963,0.15],[1.68],[-1.5707963,0.15],[1.53],[-1.5707963,0.15],[1.53],[-1.5707963,0.15],[1.38],[-1.5707963,0.15],[1.38],[-1.5707963,0.15],[1.23],[-1.5707963,0.15],[1.23],[-1.5707963,0.15],[1.08],[-1.5707963,0.15],[1.08],[-1.5707963,0.15],[0.93],[-1.5707963,0.15],[0.93],[-1.5707963,0.15],[0.78],[-1.5707963,0.15],[0.78],[-1.5707963,0.15],[0.63],[-1.5707963,0.15],[0.63],[-1.5707963,0.15],[0.48],[-1.5707963,0.15],[0.48],[-1.5707963,0.15],[0.33],[-1.5707963,0.15],[0.33],[-1.5707963,0.15],[0.1]]</rosparam> -->
<!-- saolei<rosparam param="segments">[[1.75],[-1.5707963,0.15],[1.7],[-1.5707963,0.15],[1.7],[-1.5707963,0.15],[1.5],[-1.5707963,0.15],[1.5],[-1.5707963,0.15],[1.3],[-1.5707963,0.15],[1.3],[-1.5707963,0.15],[1.1],[-1.5707963,0.15],[1.1],[-1.5707963,0.15],[0.9],[-1.5707963,0.15],[0.9],[-1.5707963,0.15],[0.7],[-1.5707963,0.15],[0.7],[-1.5707963,0.15],[0.5],[-1.5707963,0.15],[0.5],[-1.5707963,0.15],[0.35]]</rosparam> -->
<!-- <rosparam param="segments">[[1.5707963,0.15]]</rosparam> -->
<!-- ,[1.5707963,0.5],[0.67],[-1.5707963,0.5],[0.1],[-1.5707963,0.5],[1.1],[-1.5707963,0.5],[0.3],[-1.5707963,0.3],[1.5707963,0.25],[2.0] -->
<!-- <rosparam param="segments">[[0.6],[-1.0,0.3],[1.0,0.5],[0.2],[1.5707963,0.4],[1.5707963,0.4],[0.2],[-3.1415926,0.4],[0.3],[1.5707963,0.3],[0.2],[1.5707963,0.3],[1.4]]</rosparam> -->
<!-- <rosparam param="segments">[[1.75],[-1.5707963,0.15],[1.7],[-1.5707963,0.15],[1.7],[-1.5707963,0.15],[1.5],[-1.5707963,0.15],[1.5],[-1.5707963,0.15],[1.3],[-1.5707963,0.15],[1.3],[-1.5707963,0.15],[1.1],[-1.5707963,0.15],[1.1],[-1.5707963,0.15],[0.9],[-1.5707963,0.15],[0.9],[-1.5707963,0.15],[0.7],[-1.5707963,0.15],[0.7],[-1.5707963,0.15],[0.5],[-1.5707963,0.15],[0.5],[-1.5707963,0.15],[0.35]]</rosparam> -->
<!-- xht huixuan-->
<!-- <rosparam param="segments">[[8.0], [1.57, 0.2], [8.0], [1.5707963, 0.2],[8.0],[1.57,0.2],[7.0],[1.57,0.2],[7.0],[1.57,0.2],[6.0],[1.57,0.2],[6.0],[1.57,0.2],[5.0],[1.57,0.2],[5.0],[1.57,0.2],[4.0],[1.57,0.2],[4.0],[1.57,0.2],[3.0],[1.57,0.2],[3.0],[1.57,0.2],[2.0],[1.57,0.2],[2.0],[1.57,0.2],[1.0],[1.57,0.2],[1.0]]</rosparam> -->
<!-- U-curve -->
<!-- <rosparam param="segments">[[4.5], [3.14, 1.0], [-3.14,1.0],[2.0]]</rosparam> -->
<!-- xun fei -->
<rosparam param="segments">[[1.5707963,0.5],[0.4],[-1.5707963,0.5],[0.05]]</rosparam>
<!-- <rosparam param="segments">[[4.5], [3.14, 1.0], [4.0]]</rosparam> -->
<!-- typical turning maneuver -->
<!-- rosparam param="segments">[[1.57079632679, -1.2], [-1.5707963079632679, 1.2]]</rosparam -->
<!-- big path for the meadow behind the Sand building -->
<!-- rosparam param="segments">[[25.0],[1.57, 2.0], [15.0], [1.57, 2.0], [25.0], [1.57, 2.0], [15.0], [2.25, 2.0], [28.5], [-2.25, 2.0], [15.0], [-1.5707963, 2.0], [15.0]]</rosparam -->
<!-- forward-backward-forward -->
<!-- rosparam param="segments">[[1.57079632679, 1.2],[-1.5707963079632679, -1.2], [1.57079632679, -1.2], [-1.5707963079632679, 1.2]]</rosparam -->
<!-- circles -->
<!-- rosparam param="segments">[[-4.71238898038, 1.0], [4.71238898038, 1.0]]</rosparam -->
<!-- lane change -->
<!--rosparam param="segments">[[3.5], [1.0471975512, 1.0], [-1.0471975512, 1.0], [3.5]]</rosparam -->
<!-- little oval -->
<!-- <rosparam param="segments">[[3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0]]</rosparam>-->
<!-- 3x little oval -->
<!-- rosparam param="segments">[[3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0], [3.141592, 4.0], [4.0]]</rosparam -->
<!-- left-right-left -->
<!-- rosparam param="segments">[[2.0], [1.57079632679, 1.2],[-3.141592, 1.2], [3.141592], [3.141592, 1.2], [-1.5707963079632679, 1.2], [2.0]]</rosparam -->
<!-- straight line forward -->
<!-- rosparam param="segments">[[15.0]]</rosparam -->
<!-- straight line backward -->
<!-- rosparam param="segments">[[-5.0]]</rosparam -->
<!-- figure eight five times -->
<!-- rosparam param="segments">[[6.28318530718, 1.5],[-6.28318530718, 1.5],[6.28318530718, 1.5],[-6.28318530718, 1.5],[6.28318530718, 1.5],[-6.28318530718, 1.5],[6.28318530718, 1.5],[-6.28318530718, 1.5],[-6.28318530718, 1.5],[-6.28318530718, 1.5]]</rosparam -->
<!-- semicircle forward -->
<!-- rosparam param="segments">[[3.14, 0.8]]</rosparam -->
<!-- circle backward -->
<!-- rosparam param="segments">[[5.0, -1.0]]</rosparam -->
</node>
</launch>
如何在CPP文件设置<rosparam param="segments">[[1.5707963,0.5],[0.4],[-1.5707963,0.5],[0.05]]</rosparam>这个参数
最新发布





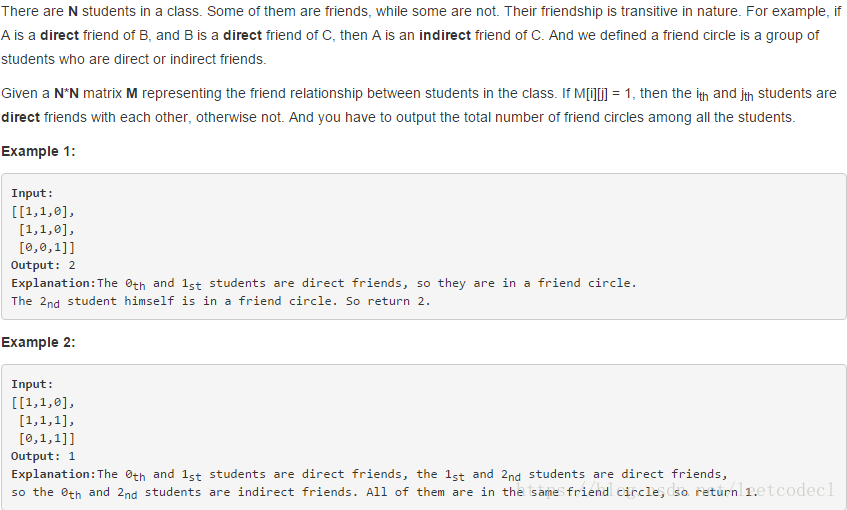
 本文介绍了解决朋友圈好友分组问题的两种算法实现方法。一种是使用并查集思想,通过不断合并好友关系来确定最终的朋友圈数量;另一种是利用深度优先搜索(DFS),遍历好友矩阵来计算独立朋友圈的数量。
本文介绍了解决朋友圈好友分组问题的两种算法实现方法。一种是使用并查集思想,通过不断合并好友关系来确定最终的朋友圈数量;另一种是利用深度优先搜索(DFS),遍历好友矩阵来计算独立朋友圈的数量。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









