



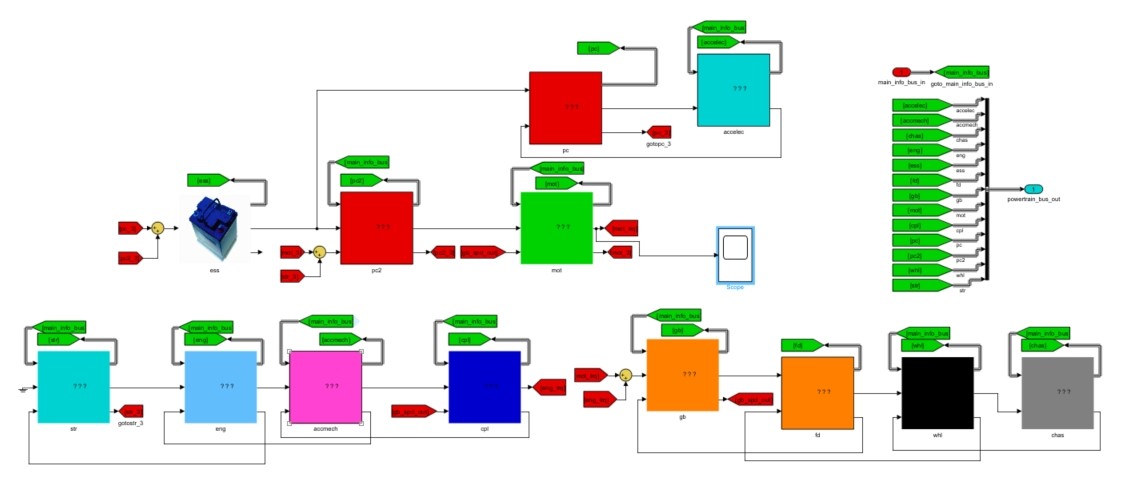
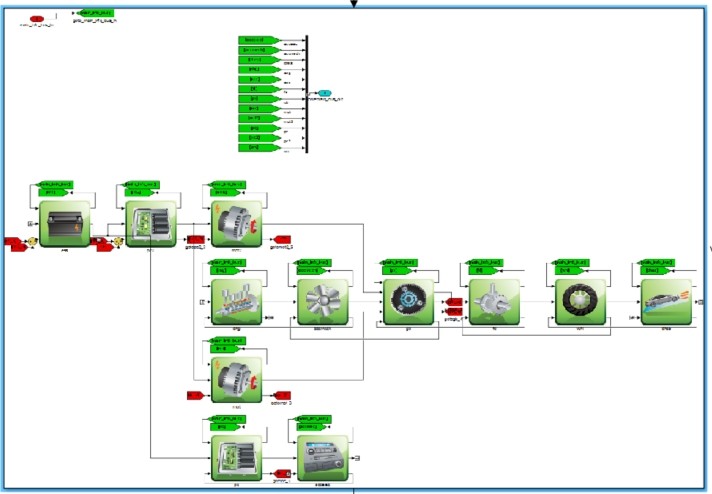
混合动力汽车simulink整车模型,并联P2构型, 基于规则的控制策略,可以直接进行CTC,WTLC,NEDC等工况仿真,模型运行及仿真
最近在研究混合动力汽车的 Simulink 整车模型,今天就来跟大家分享一下基于并联 P2 构型以及基于规则控制策略的一些有趣发现,并且看看如何用它来进行 CTC、WTLC、NEDC 等工况仿真。
并联 P2 构型
并联 P2 构型是混合动力汽车中一种较为常见的布置形式。在这种构型里,发动机和电机通过离合器连接到变速器的输入端,电机通常放置在发动机与变速器之间(这就是 P2 的位置啦)。这种布局的优势在于可以灵活地实现纯电驱动、纯发动机驱动以及混合动力驱动等多种模式。例如,在城市拥堵路况下,纯电驱动模式就能很好地发挥作用,降低油耗和排放;而在高速行驶时,发动机直接驱动车辆则能提供更高效的动力输出。
基于规则的控制策略
基于规则的控制策略是一种相对直观且易于理解的控制方式。它通过预先设定好的规则来决定发动机和电机何时工作,以及如何分配两者的功率。比如,我们可以根据车辆的行驶工况(车速、加速度等)、电池的 SOC(State of Charge,荷电状态)等参数来制定规则。
以下是一段简单的基于规则控制策略的伪代码示例,来帮助理解:
% 假设已经获取到车辆当前速度 vehicleSpeed 和电池 SOC 值 batterySOC
if vehicleSpeed < lowSpeedThreshold && batterySOC > lowSOCThreshold
% 车辆速度低且电池电量充足,采用纯电驱动
engineTorque = 0;
motorTorque = requiredTorque;
elseif vehicleSpeed > highSpeedThreshold || batterySOC < lowSOCThreshold
% 车辆速度高或者电池电量低,采用发动机驱动或混合动力驱动
if batterySOC < lowSOCThreshold
% 电池电量低,优先考虑发动机充电
engineTorque = chargingTorque;
motorTorque = 0;
else
% 混合动力驱动,根据一定比例分配扭矩
engineTorque = requiredTorque * engineRatio;
motorTorque = requiredTorque * motorRatio;
end
else
% 其他情况,可能是中等速度且电量适中,也采用混合动力驱动
engineTorque = requiredTorque * engineRatio;
motorTorque = requiredTorque * motorRatio;
end在这段代码里,首先判断车辆速度和电池 SOC 的情况。如果速度低且电量足,就纯电驱动,让发动机扭矩为 0,电机提供所需扭矩。要是速度高或者电量低,又分情况讨论,电量低就发动机充电,电量足就按比例分配发动机和电机扭矩。其他情况也按比例分配扭矩。这样就通过简单的规则,初步实现了动力源的控制。
工况仿真:CTC、WTLC、NEDC
利用搭建好的并联 P2 构型混合动力汽车 Simulink 整车模型以及基于规则的控制策略,就可以进行各种工况的仿真了。像 CTC(China Typical City cycle,中国典型城市工况)、WTLC(Worldwide Transient Light-duty vehicle Cycle,全球轻型车瞬态工况)、NEDC(New European Driving Cycle,新欧洲驾驶循环)等工况,它们代表了不同的行驶场景和特点。
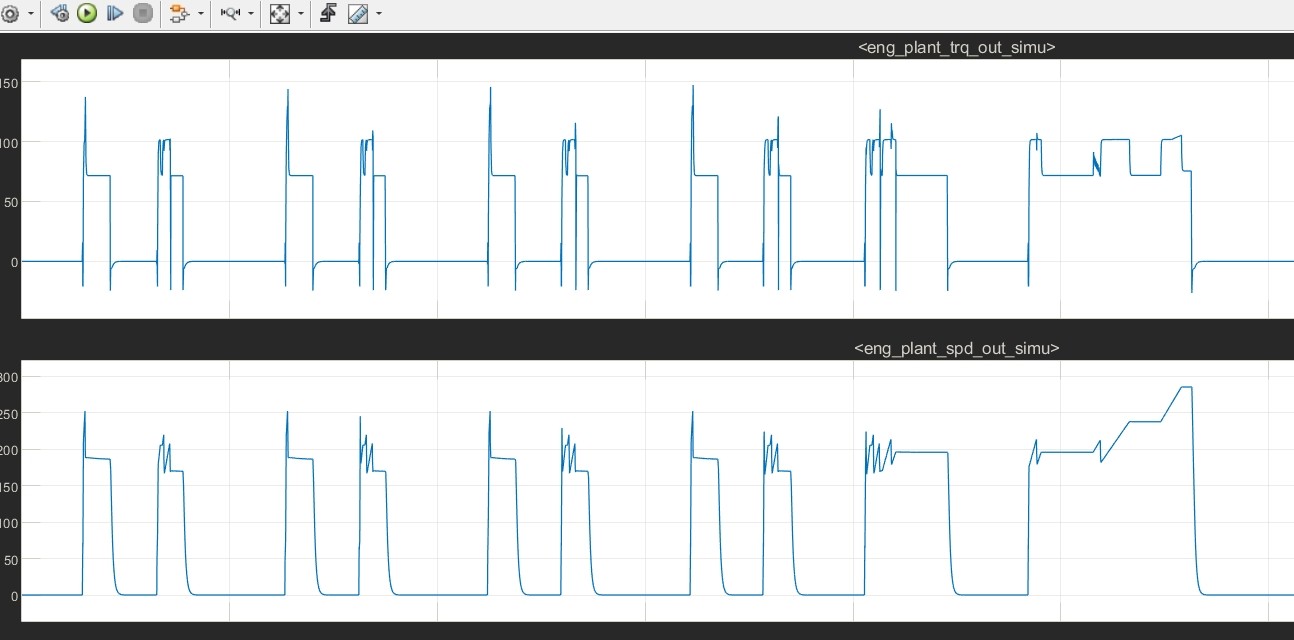
在 Simulink 中,我们可以导入相应的工况数据文件,这些文件里包含了车速随时间变化的信息。模型会根据这些车速数据,结合基于规则的控制策略,实时计算发动机和电机的扭矩输出,进而模拟车辆在不同工况下的行驶情况。比如在 NEDC 工况下,会模拟出城市、郊区等不同行驶阶段的工况,模型就会相应地调整发动机和电机的工作模式和输出功率,来匹配这个工况的需求。
通过这样的工况仿真,我们可以分析混合动力汽车在不同行驶场景下的燃油经济性、排放性能等关键指标,为进一步优化模型和控制策略提供有力的数据支持。
总之,混合动力汽车 Simulink 整车模型,特别是并联 P2 构型结合基于规则的控制策略,在工况仿真方面有着强大的功能,能帮助我们更好地理解和优化混合动力汽车的性能。后续还可以深入研究如何进一步优化控制策略,以提高车辆在各种工况下的综合性能。

















 454
454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









