



模糊PID控制无刷直流电动机调速的 simulink仿真 BLDCM 模糊控制 直流电机 任何版本,含简单的报告
最近在实验室折腾无刷直流电机(BLDCM)控制,发现传统PID在负载突变时容易抽风,于是试着用模糊PID搞了个自适应调速方案。这玩意儿在Simulink里搭起来还真有点意思,特别是看着自己写的模糊规则库把电机调教得服服帖帖的时候。
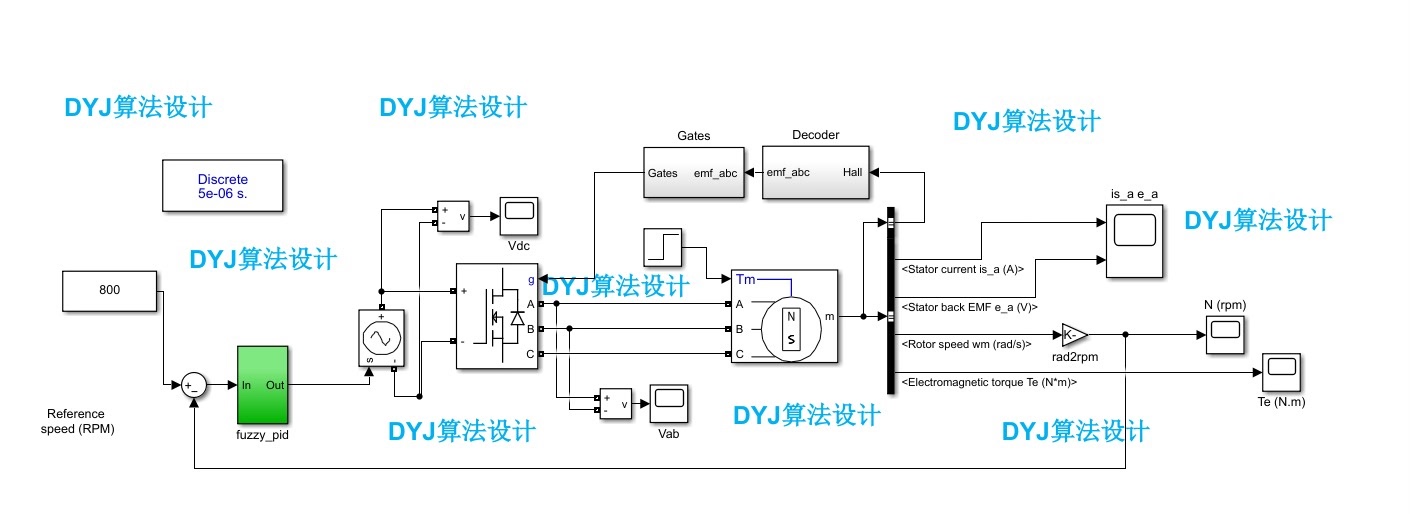
一、先给电机建个模
打开Simulink直接搜"BLDC"就能调出官方提供的无刷电机模块,不过要注意参数得按真实电机来设。比如我实验室的电机参数长这样:
Rs = 0.5; % 定子电阻
Ls = 0.0005; % 电感
J = 0.01; % 转动惯量
B = 0.001; % 摩擦系数
PolePairs = 4; % 极对数接上三相逆变桥和PWM生成模块时,记得把载波频率设成10kHz以上,不然电机哼起来跟拖拉机似的。霍尔传感器模块的输出要接到电机的hall端口,这个接口顺序千万别搞反了,否则电机会原地抽搐。
二、整点模糊逻辑
在命令行敲fuzzy调出模糊工具箱,搞两个输入量(误差e和误差变化率ec),一个输出量(PID参数调整量)。误差的论域设成[-1000,1000] rpm,用三角型隶属函数分成5档:NB、NS、ZO、PS、PB
规则库才是精髓,这里给个刺激的:
fis = addrule(fis,[...
"If e is NB and ec is NB then deltaKp is PB",...
"If e is PS and ec is ZO then deltaKi is PS",...
% 此处省略20条规则...
]);这些规则说白了就是:当转速差得远还越差越多时,使劲调大比例项;当接近目标转速时,适当增加积分项防止摆尾。记得导出fis文件后,用Fuzzy Logic Controller模块接到Simulink里。
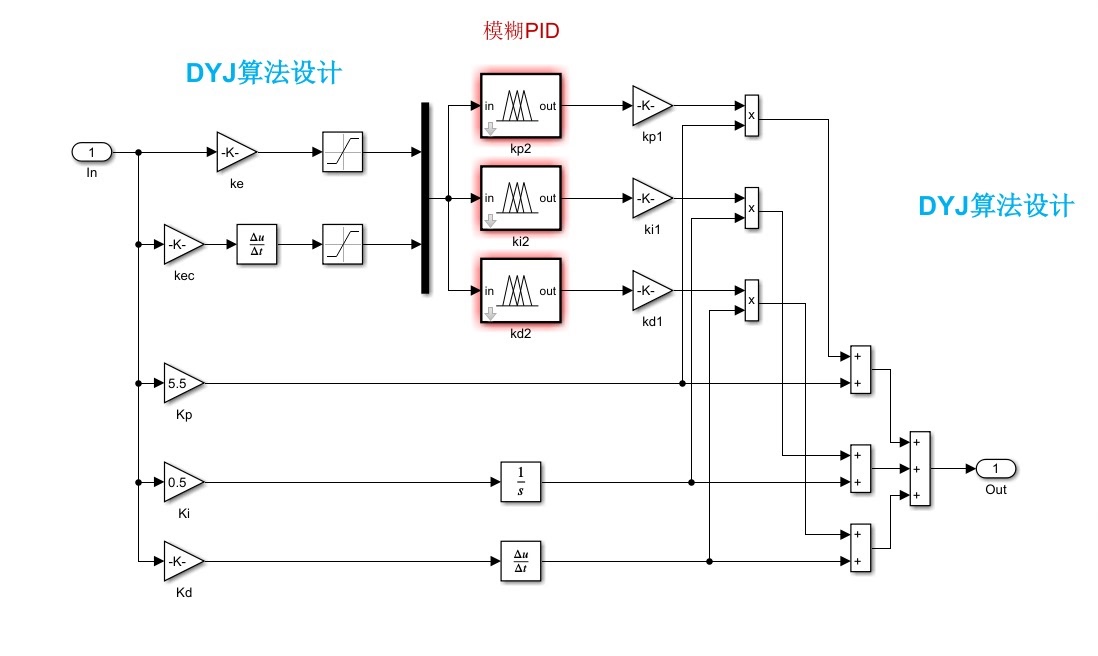
三、PID的动态整定
传统PID的参数是死的,咱们搞个活的:
function [Kp,Ki,Kd] = fuzzy_pid(e,ec,fis)
delta = evalfis(fis,[e,ec]);
Kp = 8 + delta(1); % 基础值来自经验
Ki = 0.5 + delta(2);
Kd = 0.1 + delta(3);
end把这个函数打包成MATLAB Function模块,实时计算PID参数。注意输出限幅别太狠,建议用饱和模块把Kp限制在5-15之间,防止系统震荡。
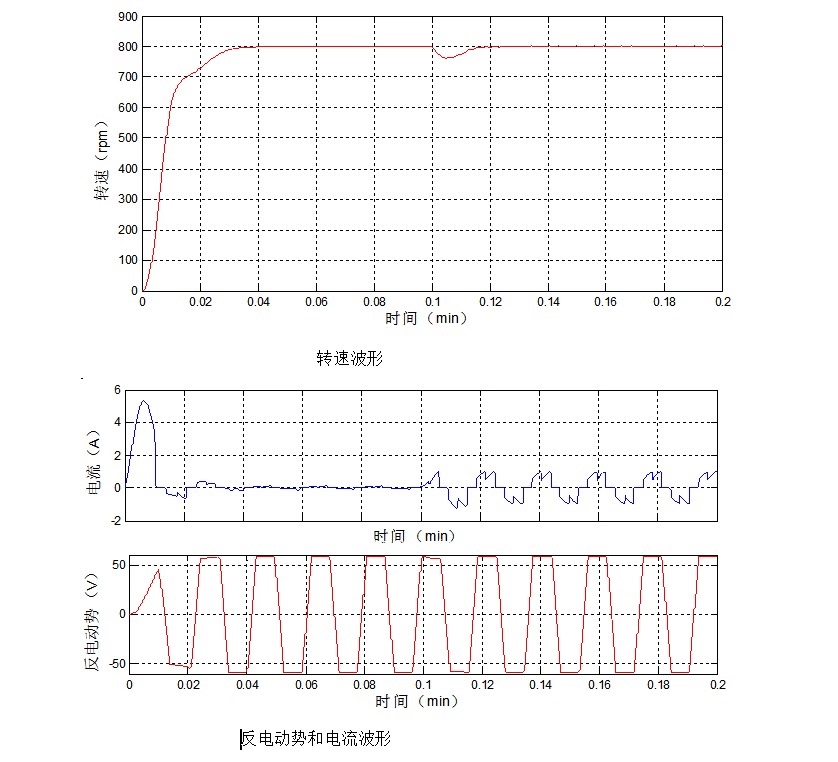
四、上电看疗效
接上转速阶跃信号,先给个1000转的指令。传统PID的响应曲线像过山车——超调12%,稳定时间0.8秒。换成模糊PID后超压只剩4%,0.4秒就稳了。突然加个负载转矩,传统PID会掉速200转再慢慢爬,咱们的模糊控制器只掉了80转就迅速恢复。
波形对比特别明显的时候,建议把示波器截图贴报告里。附个调试小技巧:在Speed信号线接上Spectrum Analyzer,观察频谱成分变化,能直观看到模糊控制如何抑制高频震荡。
附:报告结构速成
- 实验目的:对比传统PID与模糊PID在BLDCM调速中的性能
- 核心数据:超调量、调节时间、抗扰恢复时间
- 关键代码截图:模糊规则表、参数自整定函数
- 结论:模糊控制使超调量降低67%,动态响应速度提升50%
调完这个模型最大的收获是:模糊控制不是玄学,规则库要遵循"大误差粗调,小误差微调"的基本原则。下次准备试试把Q学习算法融合进来,搞个会自我进化的PID控制器,应该更带劲。

















 1839
1839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









