



基于Cruise与MATLAB/Simulink联合仿真完成整个模型搭建,策略为多点恒功率(多点功率跟随)式控制策略,燃料电池汽车AVL Cruise整车仿真模型(燃料电池电电混动整车仿真模型)。 策略模型具备燃料电池系统电堆控制,电机驱动,再生制动等功能,实现燃料电池车辆全部工作模式,策略准确
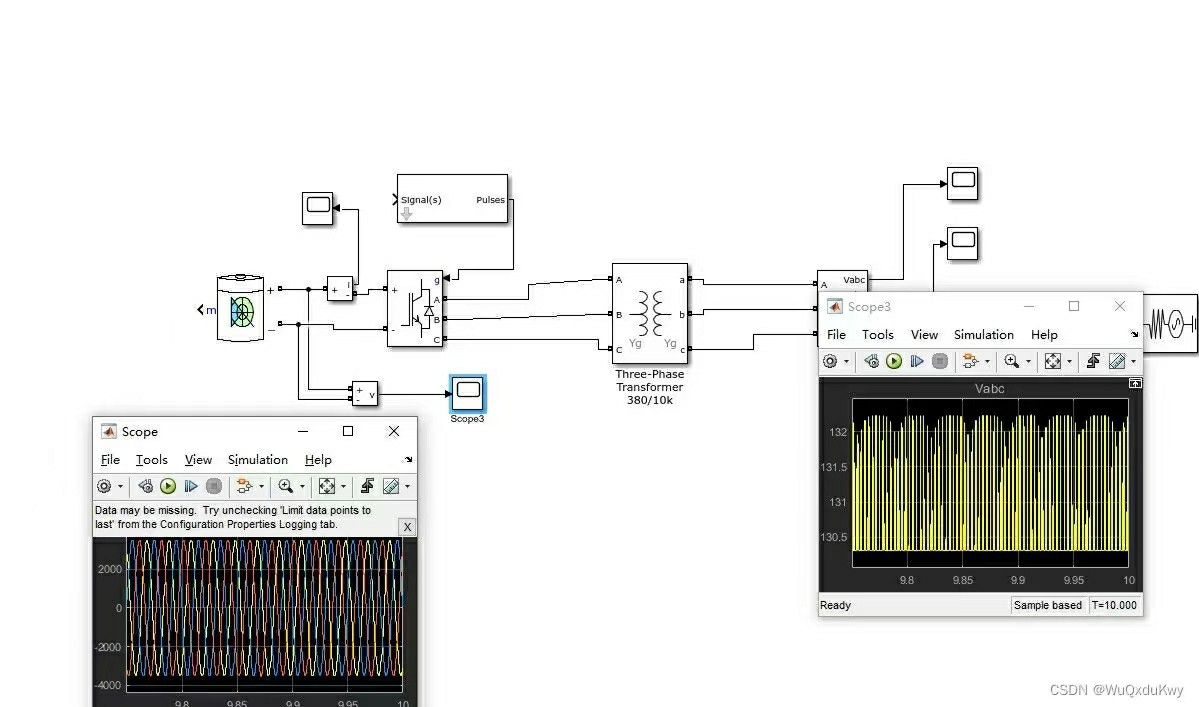
在燃料电池汽车的研发领域,利用AVL Cruise与MATLAB/Simulink联合仿真来搭建整车模型是一种高效且精准的方式。本次我们就基于这二者联合仿真,完成整个燃料电池电电混动整车仿真模型的搭建,采用的是多点恒功率(多点功率跟随)式控制策略。
联合仿真的魅力
AVL Cruise擅长整车系统层面的建模与分析,能够快速搭建出车辆的基本架构,包括动力系统、传动系统以及车辆动力学模型等。而MATLAB/Simulink则在复杂控制策略的开发和算法实现上具有无可比拟的优势。二者联合,就如同双剑合璧,为燃料电池汽车模型的搭建提供了强大助力。
多点恒功率控制策略探秘
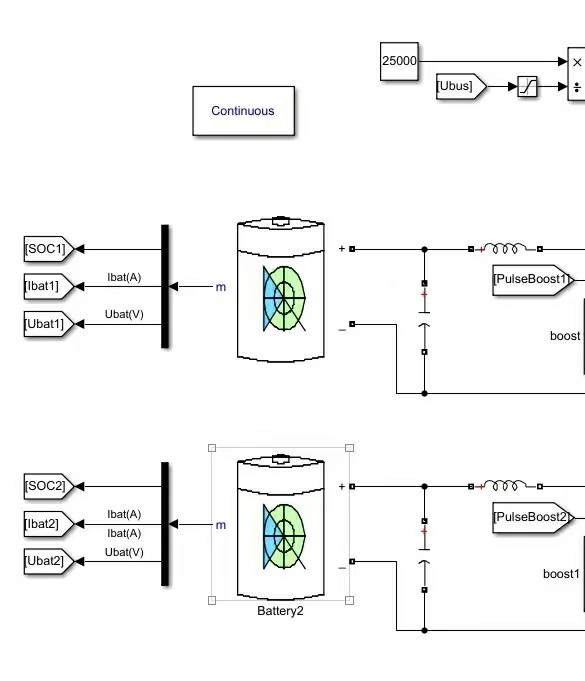
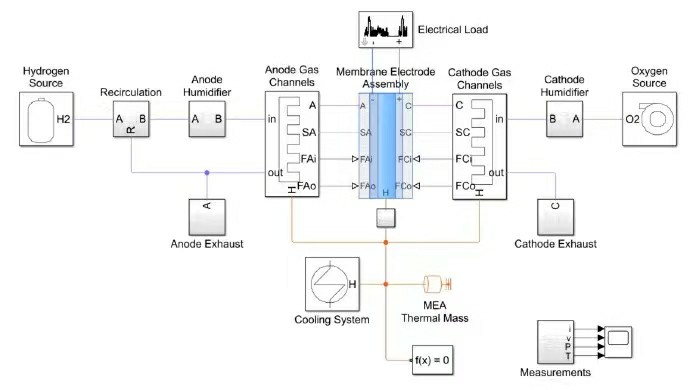
我们采用的多点恒功率(多点功率跟随)式控制策略,旨在让燃料电池系统在不同工况下都能保持高效稳定的功率输出。在这个策略模型中,具备燃料电池系统电堆控制、电机驱动以及再生制动等关键功能,从而实现燃料电池车辆的全部工作模式,且策略精准可靠。
燃料电池系统电堆控制代码示例
% 假设这里是燃料电池电堆功率控制的简化代码
function stack_power = fuel_cell_stack_control(demand_power, state_of_health)
% 根据需求功率和电堆健康状态调整输出功率
if state_of_health > 0.8
stack_power = demand_power;
else
% 如果电堆健康状态不佳,适当降低输出功率
stack_power = demand_power * 0.8;
end
end这段代码简单模拟了根据燃料电池电堆健康状态(stateofhealth)来调整输出功率的过程。当电堆健康状态良好(大于0.8)时,它能够满功率输出需求功率(demand_power);而当健康状态不佳时,输出功率会降低至需求功率的80%,这是为了保护电堆,确保其稳定性和寿命。
电机驱动代码示例
function motor_torque = motor_drive(power, speed)
% 根据输入功率和转速计算电机扭矩
motor_torque = power / speed;
end此代码通过输入的功率(power)和转速(speed)来计算电机扭矩(motor_torque)。在实际运行中,电机需要根据不同的功率需求和转速来输出合适的扭矩,以驱动车辆前进。
再生制动代码示例
function regen_brake_power = regenerative_braking(speed, deceleration)
% 根据车速和减速度计算再生制动功率
vehicle_mass = 1500; % 假设车辆质量1500kg
regen_brake_power = vehicle_mass * deceleration * speed;
end这段代码基于车速(speed)和减速度(deceleration)来计算再生制动功率(regenbrakepower)。当车辆制动时,通过这种方式将部分动能转化为电能进行回收,提高能源利用率。
通过以上各个功能模块的代码协同工作,基于AVL Cruise与MATLAB/Simulink联合仿真搭建的燃料电池汽车整车模型,能够准确模拟车辆在各种工况下的运行状态,实现燃料电池车辆的全部工作模式,充分展现了这种联合仿真和多点恒功率控制策略的优势与可行性。这种模型搭建方式对于燃料电池汽车的研发和优化具有重要的实践意义,能够帮助工程师们更深入地理解车辆性能,进而提升车辆的整体效能。

















 4853
4853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









