



直流电机转速电流双闭环调速系统 H桥驱动 matlab/simulink仿真 (1)该模型采用 matlab/simulink 2016b 版本搭建,使用matlab 2016b及以上版本打开最佳。 (2)该模型已经代为转换到各个常用版本。 【算法介绍】 (1)模型包括直流电机、电机驱动(H桥)、调制模块、负载等; (2)转速外环(ASR)采用PI控制,电流内环(ACR)采用PI控制; (3)H桥驱动,并采用PWM调制; (4)转速阶跃响应性能优良。 【简要技术说明文档和参考文献】 (1)成品模型原则上不提供技术; (2)本模型简要说明文档和运行视频。 (3)可要求simulink视频教程一份。
最近研究了直流电机转速电流双闭环调速系统,用 H 桥驱动并在 Matlab/Simulink 里实现了仿真,迫不及待想和大家分享。

这个模型我是用 Matlab/Simulink 2016b 版本搭建的,要是你也想打开运行,用 2016b 及以上版本那是最佳选择啦。不过别担心,我已经很贴心地把模型转换到各个常用版本咯,无论你用啥版本,基本都能顺利打开。
算法大揭秘
模型构成
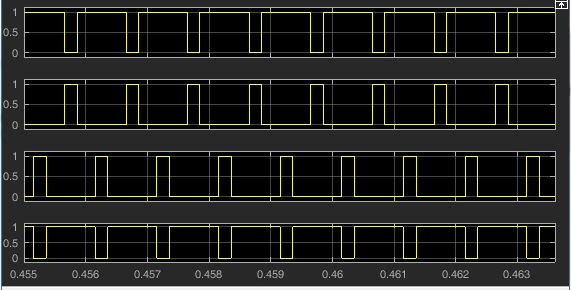
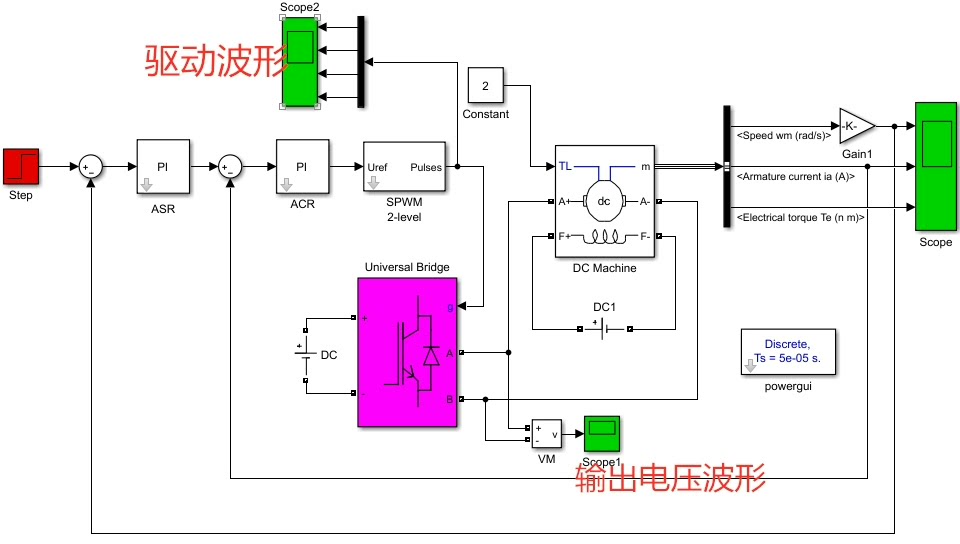
模型里包含了直流电机、电机驱动(也就是 H 桥)、调制模块以及负载。就好比一辆车,直流电机是发动机,H 桥是传动装置,调制模块决定动力怎么分配,负载就像是车上坐的人和货物。
双闭环控制
这里面转速外环(ASR)和电流内环(ACR)都采用了 PI 控制。简单说,PI 控制就像一个聪明的小管家,根据目标值和实际值的差距,不断调整输出,让系统更稳定。比如转速外环,它盯着电机的转速,一旦发现转速和我们设定的不一样,就通过 PI 算法调整输出,让转速回到正轨。
% 假设这是一个简单的 PI 控制算法示例
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
error = target_speed - current_speed; % 计算转速误差
integral = integral + error * dt; % 积分项更新
control_output = Kp * error + Ki * integral; % PI 控制输出这里代码通过设定比例系数 Kp 和积分系数 Ki 来对转速误差进行计算,比例项能快速响应误差,积分项则慢慢消除稳态误差,两者结合就构成了 PI 控制的核心。
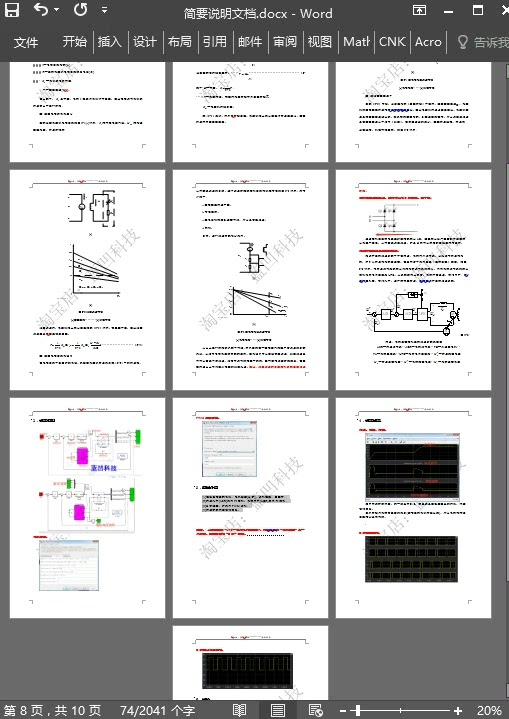
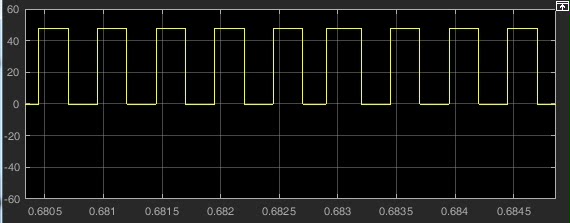
H 桥驱动与 PWM 调制
H 桥驱动电机的原理很有趣,它能控制电机正反转和速度。而 PWM 调制就像一个节拍器,通过控制高电平和低电平的时间比例,来调节电机两端的平均电压,从而控制电机转速。
% 简单的 PWM 调制代码示例
duty_cycle = 0.6; % 占空比设为 60%
if(rand < duty_cycle)
pwm_output = 1; % 输出高电平
else
pwm_output = 0; % 输出低电平
end这段代码简单模拟了 PWM 调制,通过设定占空比 duty_cycle 来决定输出高电平还是低电平,在实际应用中,这个占空比会根据控制算法动态调整。
优良的转速阶跃响应
这个模型的转速阶跃响应性能相当不错,当给定一个新的转速目标时,电机能快速且平稳地达到目标转速,波动很小。就像一辆车,一脚油门下去,速度能迅速提起来还不晃悠。
技术文档与参考
最后得说一下,成品模型原则上不提供技术哈。不过呢,我给大家准备了简要说明文档和运行视频,方便大家了解模型怎么用。要是你还想要 Simulink 视频教程一份,也可以跟我提哦。希望这个分享能让大家对直流电机转速电流双闭环调速系统的仿真有新的认识,一起在技术的海洋里遨游呀!


















 8865
8865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









