



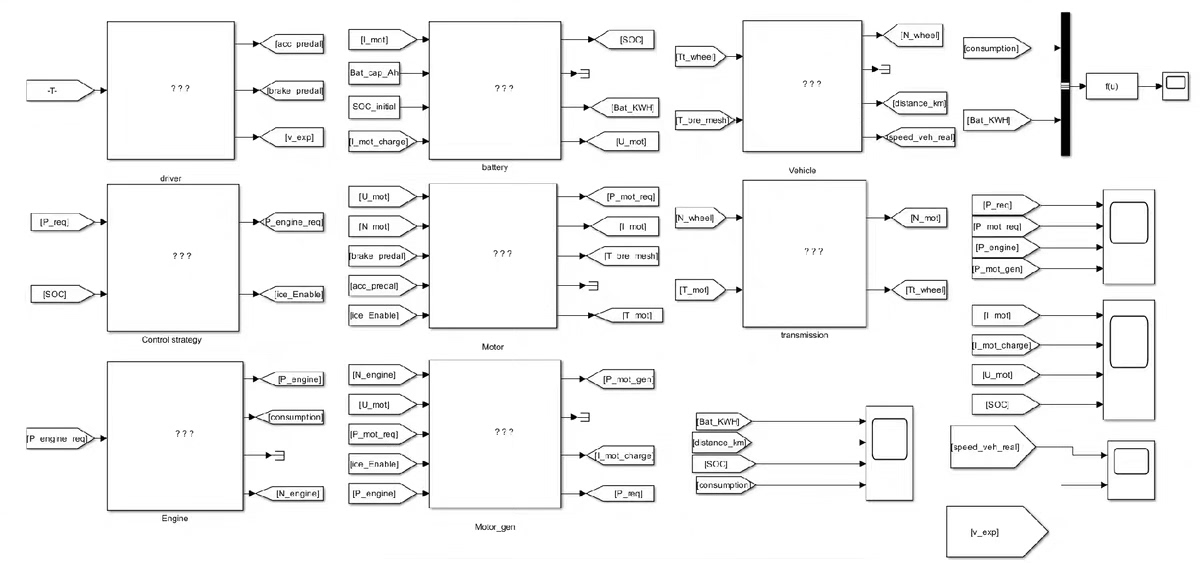
增程式混合动力汽车建模仿真模型 新能源混动控制模型 增程式混动模型搭建 (增程纯电,与日产的e-power整车配置策略类似),包含增程器模型、电机模型、电池模型,驾驶员模型,整车VCU控制模型等 基于模型的整车策略开发思路、整车模型搭建流程。 模型明确清晰,相当于手把手教学,新能源混动控制建模方面相关需求人才强烈推荐。 纯手工搭建,包括工况数据、仿真数据,发动机,电机等整车数据9f 纯电模式到增程模式切换,电量维持规则阈值参数设定。
增程式混动车的建模就像搭积木,每个模块都得严丝合缝。咱先从最核心的增程器说起——这玩意儿本质上就是个燃油发电机,但要让它在最佳效率区间蹦迪可不容易。拿MATLAB/Simulink里的查表模块举个例子:
function RPM = EngineMap(LoadDemand)
% 发动机万有特性二维查表
persistent map;
if isempty(map)
map = [2000 82; 2500 85; 3000 88]; % [转速 效率%]
end
[~,idx] = min(abs(LoadDemand - map(:,2)));
RPM = map(idx,1);
end这段代码藏着玄机:发动机转速不是随便定的,得跟着负载需求在效率高原上走钢丝。实际项目里这张map表要装下上百个工况点,标定工程师的头发就是这么没的。
电池模型可不能当个简单的水池看待,RC等效电路才是王道。看这个状态空间方程:
class BatteryCell:
def __init__(self):
self.R0 = 0.002 # 欧姆
self.R1 = 0.0015
self.C1 = 1500 # 法拉
def update(self, I, dt):
self.V_polar = (self.R1*I + (self.V_polar - I*self.R1)*np.exp(-dt/(self.R1*self.C1)))
return self.OCV - I*self.R0 - self.V_polar注意那个指数衰减项,它模拟了锂离子在电解液里的"拖延症"。SOC估算不准多半是这里的参数标定翻车,见过有团队拿三台恒温箱做参数辨识,比养实验小白鼠还费劲。
模式切换策略的核心是状态机,但千万别写成if-else地狱。试试这种基于滞回区间的设计:
typedef enum {EV, SER} Mode;
Mode decide_mode(float SOC, float pedal) {
static Mode current = EV;
if(current == EV && SOC < 0.25 && pedal > 0.4)
current = SER;
else if(current == SER && SOC > 0.3 && pedal < 0.3)
current = EV;
return current;
}阈值设定就像调咖啡配方——0.25的SOC下限配合0.4的油门开度,能避免频繁启停发动机。但要是碰到山路十八弯的工况,可能需要动态调整阈值,这时候上模糊控制才hold住。
整车模型联调时最怕遇到玄学问题,建议先拿WLTC工况练手。最近在项目里发现个坑:电机扭矩响应比发动机快两个数量级,不做延迟补偿的话,切换瞬间能给你抖出交响乐。后来在VCU里塞了个一阶惯性环节,参数调了整整三周。
仿真数据别光盯着能耗看,试试把电池功率谱和发动机工作点叠在效率云图上。有次客户拿着我们的仿真结果去实车测试,结果油耗偏差不到3%,那一刻觉得头发没白掉。
模型验证阶段得玩点骚操作——把仿真数据导入到VI-grade驾驶模拟器,让真车司机边开边骂。有个老司机反馈说增程器启动时"脚感不对",查了三天发现是扭矩补偿模块的单位搞成N·m instead of N·m/s,所以啊,量纲检查永远不嫌多。

















 1306
1306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









