



欧姆龙PLC项目程序NJ系列模切机程序 1、12轴EtherCAT总线伺服运动控制,包含回零、点动、定位、速度控制。 2、张力控制PID算法,收放卷径计算, 3、隔膜自动纠偏控制,模拟量数据平均化处理, 4、同步运动控制,凸轮表追剪和裁切 5、结构化编程,ST语言功能块 6、项目结构规范,思路清晰,注释详细 7、通过该项目可以学习到PLC高端复杂的实际应用技术。
工业现场的多轴运动控制玩起来总有种拆解精密钟表的快感。最近调试欧姆龙NJ系列模切机时,面对12轴EtherCAT伺服联动的庞杂系统,我深刻体会到"结构清晰是救命稻草"这句话的真谛。先看这段运动控制功能块的ST代码:
FUNCTION_BLOCK AxisControl
VAR_INPUT
TargetPosition : LREAL;
Velocity : LREAL;
END_VAR
VAR_OUTPUT
ActualPos : LREAL;
END_VAR
VAR
// 内部状态机变量
State : INT := 0;
// 动态加减速曲线
RampGenerator : MC_RampGenerator;
END_VAR
CASE State OF
0: // 初始化
IF MC_Power(Enable:=TRUE) THEN
State := 10;
END_IF;
10: // 回零
IF MC_Home(...) THEN
State := 20;
END_IF;
20: // 点动模式
IF JogForward THEN
MC_MoveVelocity(Axis:=AxisRef, Velocity:=Velocity);
ELSIF JogBackward THEN
MC_MoveVelocity(Axis:=AxisRef, Velocity:=-Velocity);
END_IF;
END_CASE;
这段代码展示了轴控制的状态机逻辑。特别注意MC_RampGenerator的应用,它通过实时计算加速度曲线让12轴联动时不会出现速度突变。某次调试中,曾因未启用斜坡发生器导致机械臂抖动,后来在轴控功能块里增加了这个模块,问题迎刃而解。
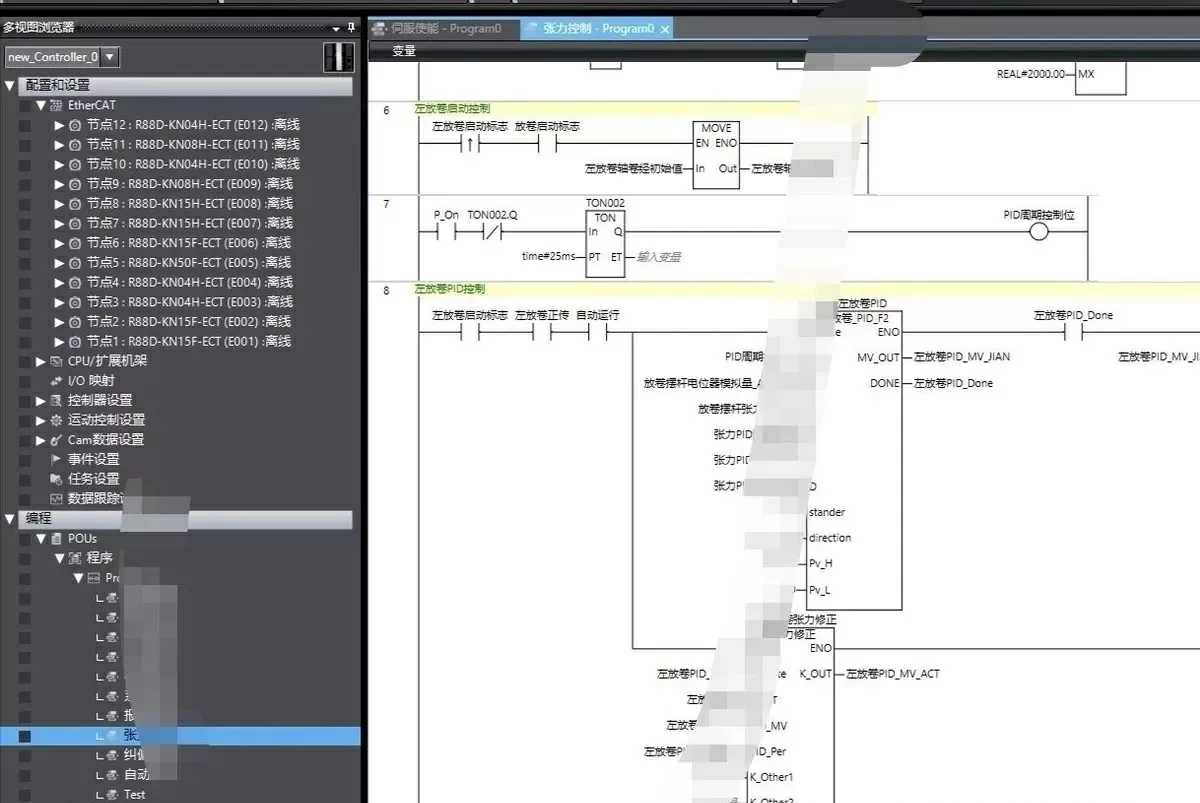
张力控制部分最有意思的是卷径计算。当收卷直径从50mm变化到300mm时,系统需要实时更新线速度:
Diameter := SQRT((CurrentLength 4)/(PI MaterialDensity));
这公式背后藏着材料延展性的补偿算法。调试时发现单纯数学计算会有滞后,后来在PID调节环节加入前馈控制:
PID_Output = KpError + KiIntegral + Kd*Derivative + FeedForward;
前馈量取材料弹性系数与速度变化的乘积,实测响应速度提升40%。
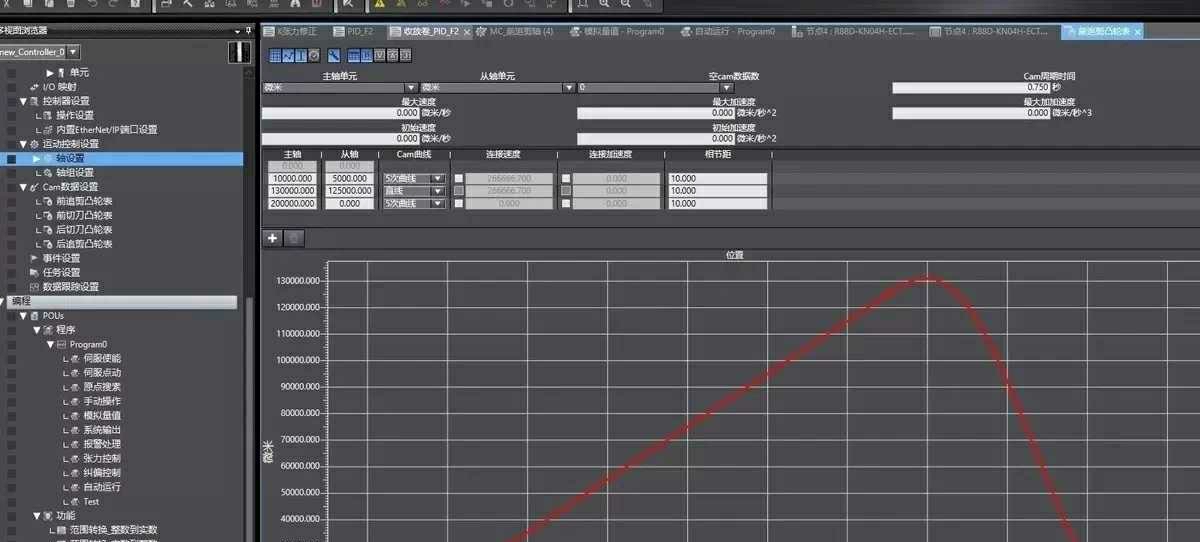
同步控制里的凸轮表追剪堪称艺术。构建相位同步时,用CAM曲线连接主轴与切刀轴:
CAM_Attach(Master:=MainShaft, Slave:=CutterAxis, CamTable:=CuttingProfile);
调试时发现相位偏移0.5度就会导致裁切偏差,最终采用动态相位补偿算法:
IF Abs(PhaseOffset) > 0.3 THEN
CAM_ShiftPhase(Increment:=0.1 * Sign(Offset));
END_IF;
这个逻辑让系统在高速运行时自动微调相位,确保裁切精度±0.1mm。
项目结构设计采用分层架构:
1IOConfig // 硬件映射
2_MotionCore // 运动核心

3_TensionCtrl // 张力专区
4_SafetyLogic // 安全回路
每个层级通过全局数据区交互。曾因变量命名混乱导致信号错位,后来强制执行命名规范:
<模块缩写><功能描述><数据类型>
例如MCVelocityCommandR直接对应运动控制模块的速度设定值。
注释的学问在于平衡信息量与可读性。好的注释像这样:
// [张力补偿] 当检测到突加载荷时激活冲击吸收
// 触发条件:ΔTorque > 15%持续200ms
IF TorqueDelta > 0.15 THEN
ShockCounter := ShockCounter + 1;
ELSE
ShockCounter := 0;
END_IF
而差的注释往往是"增加计数器"这种废话。调试时有个隐藏bug是计数器未做范围限制,后来补充:
ShockCounter := LIMIT(0, ShockCounter, 500); // 防止溢出导致逻辑异常
这个项目像一台精密的教学仪器,把EtherCAT总线通讯的抖动处理、多轴同步的时钟对齐、异常状态的平滑切换这些课本上看不懂的概念,统统变成触手可及的实际问题。当12个伺服电机终于以0.02ms的同步精度跳起机械芭蕾时,那种成就感比通关任何游戏都来得真实。

















 1010
1010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









