



DIY壁障自平衡小车,带超声波壁障功能,带APP蓝牙功能,STM32平衡车,赠送原理图,PCB图,源代码等资料。 可选配功能:寻迹功能,OLDE显示、超声波跟随等。 主要硬件:STM32F103C6T6单片机、MPU6050陀螺仪模块、DRV8833电机驱动模块、HLK-B40蓝牙模块、直流减速电机、新款车轮、14500充电电池两节、电池盒一个。 集成STM32单片机最小系统,SWD接口下载代码,所有引脚全部引出,方便二次开发。 买家须知: 1.本小车默认不包括寻迹模块、显示屏模块等,需选配。 2.本小车采用两节3.7V锂电池供电,型号为14500型,需买家自备电池和充电器。 3.本小车采用SWD接口下载代码,需买家自备下载器。 4.手机APP仅限于安卓手机,APP无源码,苹果手机无法使用。 5.原理图和PCB文件为PDF版本。
最近玩了个超有意思的项目——DIY壁障自平衡小车,忍不住要和大家分享。这小车功能超丰富,不仅有超声波壁障功能,还带APP蓝牙功能,基于STM32打造,简直酷到没朋友。而且,还赠送原理图、PCB图以及源代码等资料,对于电子爱好者来说,这福利相当赞。
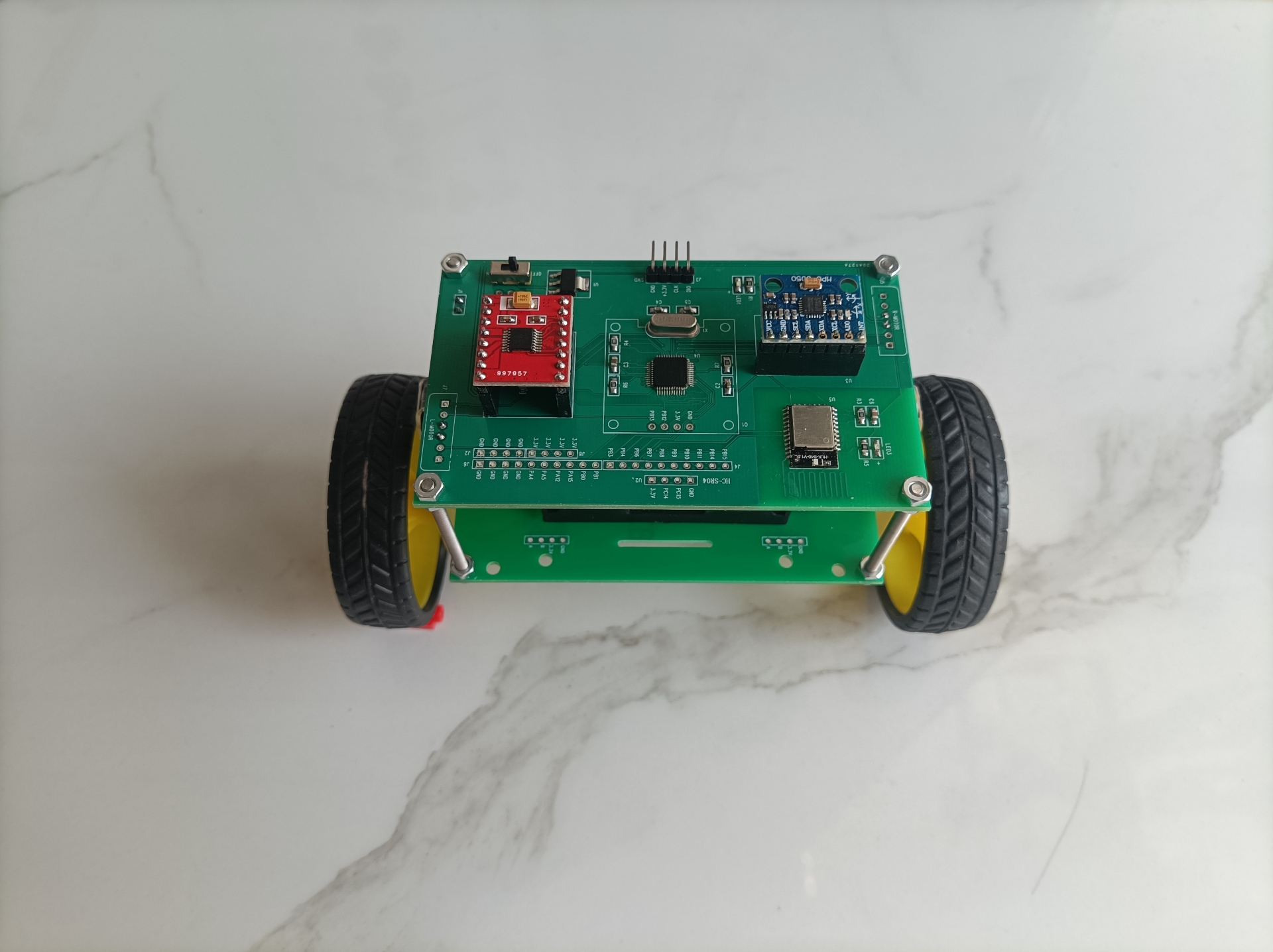
硬件大揭秘
先来看看主要硬件都有啥:
- STM32F103C6T6单片机:小车的大脑,性能稳定,处理能力强,集成了STM32单片机最小系统,通过SWD接口下载代码,并且所有引脚全部引出,这对后续二次开发简直太友好啦,想加啥功能都方便。
- MPU6050陀螺仪模块:用来检测小车的姿态,获取角度等信息,从而实现自平衡的关键所在。
- DRV8833电机驱动模块:负责驱动直流减速电机,给小车提供动力,让它能跑起来。
- HLK - B40蓝牙模块:实现小车与手机APP的蓝牙通信,通过手机就能远程控制小车。
- 还有直流减速电机、新款车轮、14500充电电池两节及电池盒一个,为小车提供稳定的动力来源。
功能亮点
超声波壁障功能
超声波壁障是个超实用的功能。原理就是通过超声波传感器发射超声波,碰到障碍物后反射回来,传感器接收反射波,通过计算发射和接收之间的时间差,就能得出障碍物的距离。当距离小于设定值时,小车就会做出相应动作,比如减速或者转向。
代码示例(简单示意获取距离):
// 假设定义了超声波相关引脚
#define Trig_Pin PA0
#define Echo_Pin PA1
float getDistance() {
float distance;
uint32_t time;
// 触发信号
GPIO_SetBits(GPIOA, Trig_Pin);
delay_us(10);
GPIO_ResetBits(GPIOA, Trig_Pin);
// 等待回波信号
while (GPIO_ReadInputDataBit(GPIOA, Echo_Pin) == 0);
TIM_SetCounter(TIM3, 0);
TIM_Cmd(TIM3, ENABLE);
while (GPIO_ReadInputDataBit(GPIOA, Echo_Pin) == 1);
TIM_Cmd(TIM3, DISABLE);
time = TIM_GetCounter(TIM3);
// 根据声速计算距离
distance = time * 0.034 / 2;
return distance;
}这段代码里,首先设置触发引脚发送一个短脉冲,然后等待回波信号,通过定时器TIM3记录高电平时间,再根据声速算出距离。
APP蓝牙功能
利用HLK - B40蓝牙模块实现和手机APP的连接。手机APP通过蓝牙发送指令,小车接收后做出相应动作,比如前进、后退、左转、右转等。不过要注意,手机APP仅限于安卓手机,且无源码,苹果手机无法使用。
可选配功能超丰富
除了上面两个主要功能,小车还可选配寻迹功能、OLED显示、超声波跟随等。要是选了寻迹功能,小车就能沿着特定轨迹行驶;OLED显示可以实时显示小车的一些状态信息;超声波跟随则能让小车跟着前方的物体移动,可玩性大大增加。但要注意哦,本小车默认不包括寻迹模块、显示屏模块等,需选配。
买家须知那些事儿
- 供电相关:小车采用两节3.7V锂电池供电,型号为14500型,这就需要买家自备电池和充电器啦。
- 代码下载:采用SWD接口下载代码,所以下载器也得买家自备。
- 原理图和PCB文件:提供的是PDF版本,方便查看和制作电路板。
总的来说,这个DIY壁障自平衡小车无论是对于电子小白入门,还是大神进阶开发新功能,都是个很棒的项目。有了赠送的各种资料,上手难度也降低不少。心动不如行动,赶紧动手搞起来吧!

















 536
536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









