







2.17 DefaultExecutorRepository
public class DefaultExecutorRepository implements ExecutorRepository, ExtensionAccessorAware {
// ....
}
2.17.1 核心字段
private final ConcurrentMap<String, ConcurrentMap<String, ExecutorService>> data = new ConcurrentHashMap<>();
这是 DefaultExecutorRepository 类中的一个核心数据结构,用于存储和管理所有线程池执行器。
数据结构分析
类型结构
- 外层 Map: ConcurrentMap<String, ConcurrentMap<String, ExecutorService>>
- Key: 第一层键,通常表示执行器的类别或组件类型
- Value: 内层 Map,存储具体的服务执行器
- 内层 Map: ConcurrentMap<String, ExecutorService>
- Key: 第二层键,通常是服务的标识符(如端口号、消费者标识等)
- Value: ExecutorService 实际的线程池执行器实例
并发安全
- 使用 ConcurrentHashMap 确保线程安全,支持高并发环境下的读写操作。
设计目的:
- 分层管理线程池
// 第一层键示例:
// - EXECUTOR_SERVICE_COMPONENT_KEY ("provider")
// - CONSUMER_SHARED_EXECUTOR_SERVICE_COMPONENT_KEY ("consumer")
// 第二层键示例:
// - Provider: 端口号 (String.valueOf(url.getPort()))
// - Consumer: MAX_KEY (共享同一个线程池)
- 按服务隔离线程池
- 不同服务使用独立的线程池,避免相互影响
- 消费者共享全局线程池(通过 MAX_KEY 标识)
- 提供者按端口隔离线程池
- 高效查询和缓存
- O(1) 时间复杂度获取特定服务的线程池
- 避免重复创建相同配置的线程池
2.17.2 使用场景
➡️ 1. 线程池创建流程
@Override
public synchronized ExecutorService createExecutorIfAbsent(URL url) {
// 1. 获取第一层键 (executorKey)
String executorKey = getExecutorKey(url);
// 2. 获取或创建第二层Map
ConcurrentMap<String, ExecutorService> executors =
ConcurrentHashMapUtils.computeIfAbsent(data, executorKey, k -> new ConcurrentHashMap<>());
// 3. 获取第二层键 (executorCacheKey)
String executorCacheKey = getExecutorSecondKey(url);
// If executor has been shut down, create a new one
if (executor.isShutdown() || executor.isTerminated()) {
executors.remove(executorCacheKey);
executor = createExecutor(url); // createExecutor, spi机制
executors.put(executorCacheKey, executor);
}
// 4. 获取或创建线程池
ExecutorService executor =
ConcurrentHashMapUtils.computeIfAbsent(executors, executorCacheKey, k -> createExecutor(url));
}
在createExecutor方法中:
protected ExecutorService createExecutor(URL url) {
return (ExecutorService) extensionAccessor
.getExtensionLoader(ThreadPool.class)
.getAdaptiveExtension()
.getExecutor(url);
}
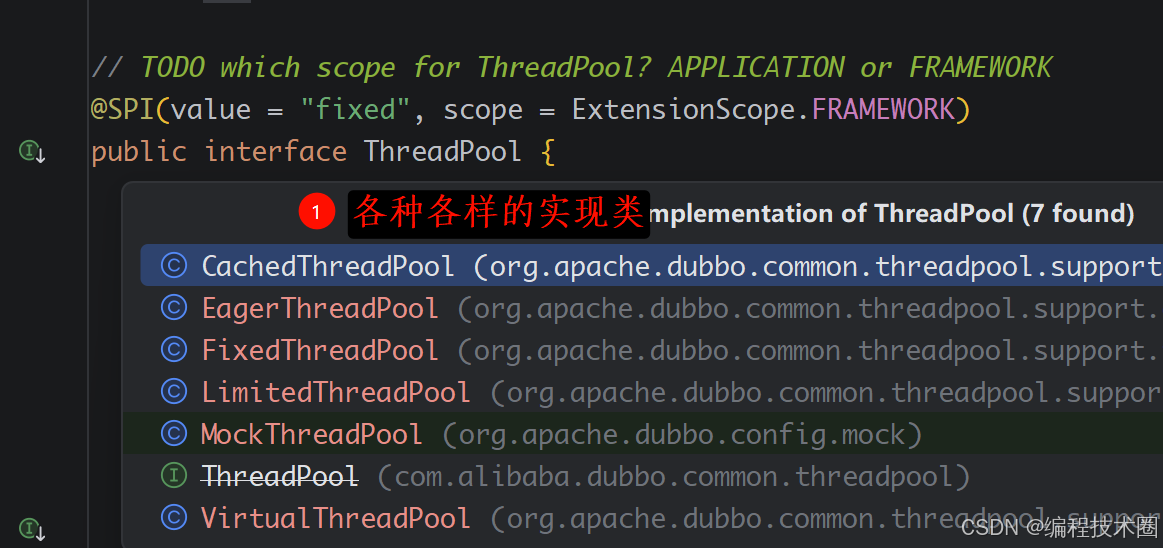
ThreadPool被@SPI修饰:
@SPI(value = "fixed", scope = ExtensionScope.FRAMEWORK)
public interface ThreadPool {
@Adaptive({THREADPOOL_KEY})
Executor getExecutor(URL url);
}
默认使用 FixedThreadPool 实现,但是 ThreadPool 接口中的 getExecutor() 方法被 @Adaptive 注解修饰,动态生成的适配器类会优先根据 URL 中的 threadpool 参数选择 ThreadPool 的扩展实现。ThreadPool 接口的实现类如下图所示:
不同的实现会根据不同的URL创建不同特性的线程池, 以CacheThreadPool为例进行分析:
CachedThreadPool 是 Dubbo 框架中实现的一种自调节线程池,类似于 JDK 中的 Executors.newCachedThreadPool()。它能够根据负载自动调整线程数量,在空闲时回收线程,在需要时创建新线程
@Override
public Executor getExecutor(URL url) {
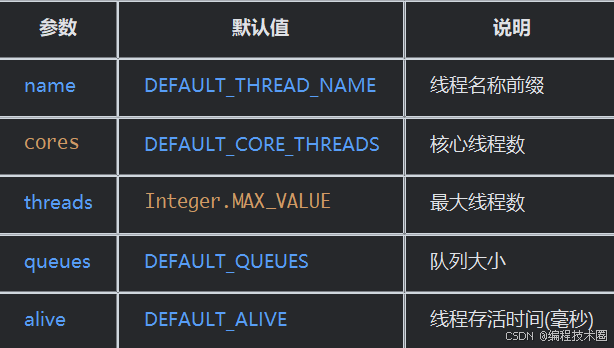
// 1. 获取线程池配置参数
String name = url.getParameter(THREAD_NAME_KEY,
(String) url.getAttribute(THREAD_NAME_KEY, DEFAULT_THREAD_NAME));
int cores = url.getParameter(CORE_THREADS_KEY, DEFAULT_CORE_THREADS);
int threads = url.getParameter(THREADS_KEY, Integer.MAX_VALUE);
int queues = url.getParameter(QUEUES_KEY, DEFAULT_QUEUES);
int alive = url.getParameter(ALIVE_KEY, DEFAULT_ALIVE);
// 2. 根据队列大小配置创建相应阻塞队列
BlockingQueue<Runnable> blockingQueue;
if (queues == 0) {
blockingQueue = new SynchronousQueue<>();
} else if (queues < 0) {
blockingQueue = new MemorySafeLinkedBlockingQueue<>();
} else {
blockingQueue = new LinkedBlockingQueue<>(queues);
}
// 3. 创建并返回 ThreadPoolExecutor 实例
return new ThreadPoolExecutor(
cores,
threads,
alive,
TimeUnit.MILLISECONDS,
blockingQueue,
new NamedInternalThreadFactory(name, true),
new AbortPolicyWithReport(name, url));
}
➡️ 关键配置参数
⬆️ 队列策略
三种队列类型选择:
- SynchronousQueue (queues=0):
- 直接交付任务,不保存任务
- 提交的任务必须立即被消费
- MemorySafeLinkedBlockingQueue (queues<0):
- 内存安全的链表阻塞队列
- 防止内存溢出的安全队列实现
- LinkedBlockingQueue (queues>0):
- 固定容量的链表阻塞队列
- 有界队列,限制等待任务数量
✅ 线程池特性
-
自调节机制
- 无限扩展: 最大线程数设置为 Integer.MAX_VALUE
- 快速回收: 默认 1 分钟空闲后回收线程
- 按需创建: 新请求到来时即时创建线程
-
线程管理
- 使用 NamedInternalThreadFactory 创建命名线程
- 实现内部线程(ThreadLocal)的清理机制
- 提供详细的线程名称便于调试和监控
-
拒绝策略
- 采用 AbortPolicyWithReport 策略:
- 任务被拒绝时抛出异常
- 记录详细的拒绝原因和统计信息
- 提供监控和告警支持
- 采用 AbortPolicyWithReport 策略:
🚀 优点:
- 适合执行大量短期异步任务
- 能够根据负载动态调整资源使用
- 减少手动配置线程池的复杂性
➡️ 注意事项
- 可能创建过多线程导致资源耗尽
- 不适用于长期运行的任务
- 需要合理配置队列大小防止内存溢出
与其他线程池对比:

🚀 2. 线程池获取流程
@Override
public ExecutorService getExecutor(URL url) {
// 1. 根据URL获取第一层键
Map<String, ExecutorService> executors = data.get(getExecutorKey(url));
// 2. 根据URL获取第二层键
String executorCacheKey = getExecutorSecondKey(url);
// 3. 获取具体线程池实例
ExecutorService executor = executors.get(executorCacheKey);
}
2.17.3 存储策略
Provider 线程池存储
- 第一层键: EXECUTOR_SERVICE_COMPONENT_KEY (“provider”)
- 第二层键: 端口号,实现按端口隔离线程池
- 每个端口对应独立的线程池
Consumer 线程池存储
- 第一层键: CONSUMER_SHARED_EXECUTOR_SERVICE_COMPONENT_KEY (“consumer”)
- 第二层键: MAX_KEY (Integer.MAX_VALUE),所有消费者共享同一份线程池
- 实现消费者线程池全局共享
2.17.4 生命周期管理
➡️ 1. 资源清理
@Override
public void destroyAll() {
data.values().forEach(executors -> {
if (executors != null) {
executors.values().forEach(executor -> {
if (executor != null && !executor.isShutdown()) {
ExecutorUtil.shutdownNow(executor, 100);
}
});
}
});
data.clear(); // 清空整个数据结构
}
⬆️ 2. 设计优势
- 高效的资源利用
- 避免重复创建相同配置的线程池
- 合理的共享策略减少资源消耗
- 灵活的隔离策略
- 提供者按端口隔离,确保服务间不互相影响
- 消费者全局共享,提高资源利用率
- 线程安全保障
- 使用并发安全的数据结构
- 关键操作添加同步控制
- 易于维护和扩展
- 清晰的层次结构便于理解和维护
- 可以轻松扩展更多的分类维度

















 7704
7704

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









