



搞清楚了有哪些利益相关方之后,那接下来我们要干的一件事是统一大家的长期目标,就是被我们称之为叫愿景的。那这一步为什么是要统一愿景呢,其目的是为了把尽可能多的利益相关方整合到我们的队伍里来,我们姑且把这件事称之为叫建立统一战线。大家知道建立统一战线这个其实是我们伟大的毛主席毛爷爷发明的,我一直都非常钦佩我们的毛主席,毛爷爷,我一直认为他是一个具有非常非常大的领导力的人,到现在为止都没有看到哪一位领导比他更有领导力。毛爷爷最擅长的一件事是什么,把大家整合在一起形成统一战线,能让大家求同存异,为了这个共同的目标去共同地奋战。
那毛爷爷的这种领导力其实是非常值得我们学习的,尤其是他很多的做法。我们会发现伟大的毛主席很擅长给大家勾画愿景,然后深知大家的痛点,尤其是广大群众老百姓的痛点,很善于找到这个贫富差距所造成的大家心中的痛苦,然后用自己的力量,用美好的愿景把大家整合起来,发动一场非常伟大的变革,去建立了我们的新中国。
我们说我们作为一个项目经理或者项目群经理,是不用干这么伟大和复杂的事,但是我们确实可以从中间学习到很多东西,尤其是在建立愿景的部分。从建立愿景的角度来说,任何一个领导力流派都会鼓励大家要组织大家共同去创造愿景,而不是自己写愿景。
这个愿景是什么?愿景是一幅更美好的未来图片,它其实描绘的是一个状态,它描绘的是在未来某一个时刻,如果经过我们大家共同的努力,我们将来能达到一个非常美好的,非常令人向往的状态,这个其实是对美好生活的描述。那这个愿景其实一定是一个远期的目标,可能也许是几年之后,甚至是几十年之后,甚至上百年以后。很多时候为什么我们要去描绘愿景,是因为广大的利益相关方有分歧,分歧大多数都是当前的分歧,但我们知道其实当前的分歧并不表明经过多少年之后我们还会有分歧。有的时候我们要想大家能够放下成见,求同存异,就必须给大家描绘未来那个时点,因为那个时候我们大家可能就没有分歧了。
所以我们大家要擅长描绘远期的愿景,因为近期有矛盾,远期可能就没有矛盾了,如果当大家知道其实我们所有的矛盾都是暂时的,那其实未来我们最终会走向一起,未来我们是可以和睦相处,共同生活,共同能够享受一个更美好未来的时候,那这时候大家才有可能放下当下的一些矛盾和问题,求同存异,更多的是为了我们共同的目标去做努力,那愿景就是用来干这件事的。
但是这个愿景不能自己写,自己写了别人不信;第二,自己写可能写不到人家的痛点上。所以这个写愿景的时候其实讲究的是组织大家共同创造愿景,我们把它叫共创愿景。共创愿景共创的是一个大家都非常向往的愿景,代表的是大家共同的希望。

这件事其实在项目群管理或者战略项目的管理的过程中是非常重要的,因为它是一个统一大家思想和统一大家长期目标的非常重要的步骤,其目的是让大家的内心接受,把大家的内心整合到一起,只有大家的内心整合到一起之后,大家才有可能心平气和地坐在一起思考协同,协作,如何成为一个团队的问题。如果没有一个共同的愿景,或者即使我们写了一个愿景大伙儿不知道,或者我们自己写了一个愿景大家没参与,这时候大家都会觉得这个愿景不是我们的愿景,或者你有美好的愿景我不知道,如果我不知道我就没有感受,没有感受我就想象不出来我跟其他的人在一起,我放下成见,我作出妥协到底对自己有什么益处。所以愿景是帮助大家去解决这个问题的。
愿景把大家的内心整合到一起,让大家能够有机会坐下来心平气和共谋大事,共谋未来是一个基础性工作,但是不能只有愿景,因为愿景毕竟是一个虚的,那如果我们希望让我们的战略项目和项目群确实能够实实在在的,将来有价值,而且能够长期地让大家都非常去支持的话,我们必须还得搞清楚我们这个项目群真正的收益是什么,那愿景可能是虚的,但是收益可是实实在在的。那当我们的项目群做完之后,我们怎么判断这个项目群到底做得有没有价值,其实我们更多的就是要去看这个项目群所实现的这个收益,是不是真的对企业的战略目标有支撑,如果能支撑企业的战略目标就是有价值,不能支撑就是没有价值。
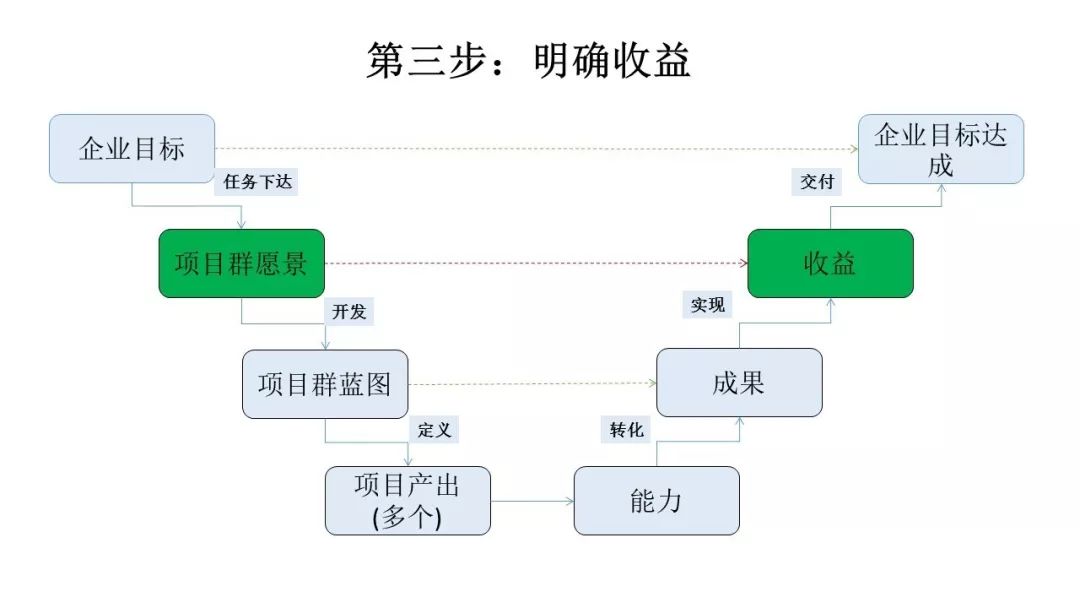
从上面的这张图,我们大家可以看到其实收益和项目群愿景是相对的,其实在这张图上是一张V形图,我给大家稍微做一下解释。在这张图里,我们可以看到其实往往项目群的愿景是来自于一个企业的战略目标的,根据企业的战略目标下达下去之后,然后我们的团队会发现,如果我们的项目群愿景实现了,那它可能就会支撑企业的战略目标......

















 1014
1014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









