



在电子元器件的世界里,Negative Temperature Coefficient(NTC)热敏电阻是一位多才多艺的“演员”。它通过自身电阻随温度升高而降低的特性,在不同的电路舞台上扮演着截然不同的角色。理解这三种角色,是正确选型和应用的关键。
一、 “温度计” — 测温型NTC
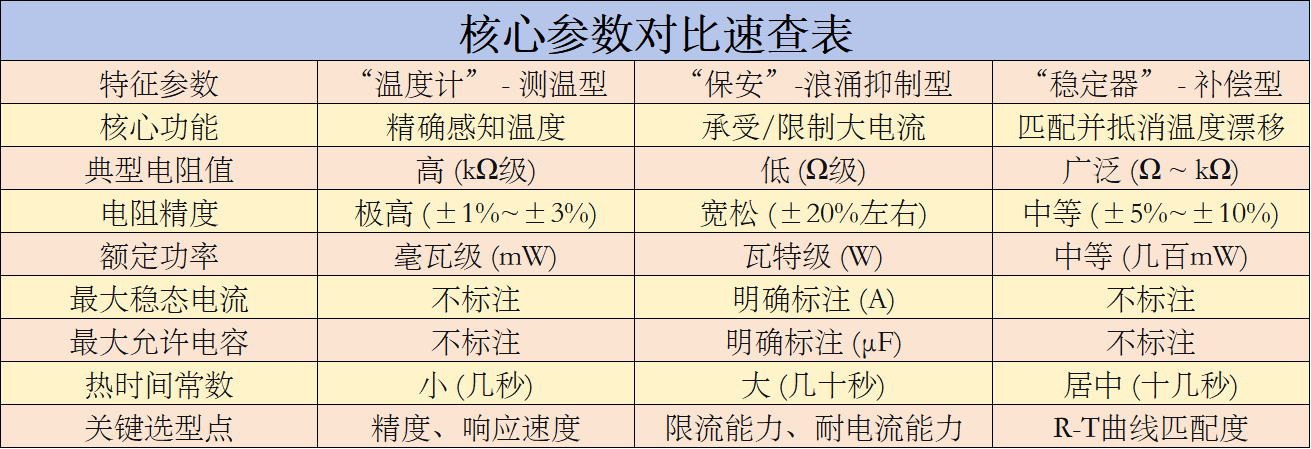
核心任务:精确感知温度,将温度变量转换为电阻变量。
工作形象:
就像实验室里的精密温度计,它的唯一目标就是准确报告当前环境的温度。
通常封装小巧(如玻封、环氧树脂包封),以便快速响应温度变化。
参数特征:
高电阻值:通常在kΩ级别(如10kΩ, 100kΩ)。便于使用微小电流测量,避免自热引入误差。
高精度:电阻值(R25)和B值的公差非常严格,常见于±1%、±2%。因为精度直接决定测量准确度。
低额定功率:通常在毫瓦级(如50mW)。再次强调需在微小功率下工作,防止“自己发热自己测”。
快速响应:热时间常数小(通常<10秒),能快速跟踪温度变化。
绝不同时出现:你绝不会在它的规格书上看到“最大稳态电流”或“最大允许电容量”。
典型应用:
数字体温计、空调温控器、汽车水温/油温传感器、电池包温度监控等任何需要知道“现在到底多少度”的场景。
▶ 如何识别?:找到参数表中阻值高、精度高、功率低的NTC,它就是“温度计”。
二、 “保安” — 浪涌抑制型NTC
核心任务:抑制电路开机瞬间产生的巨大冲击电流(浪涌电流),保护后续元件。
工作形象:
就像一位强壮的保安,在电路闸门拉开的瞬间,用他强壮的身躯(高电阻)挡住汹涌的人流(浪涌电流)。待人群平稳后(电路正常启动),他便退到一旁(电阻变小),不影响正常通行(电路工作)。
参数特征 :
低电阻值:通常在Ω级别(如5Ω, 10Ω, 20Ω)。需要足够的冷态电阻来有效限流。
宽松的精度:电阻公差通常为±20%左右。因为只要限流能力在数量级上正确即可,不要求精确。
高功率与高电流:额定功率为瓦特级(如1W~5W),并明确标注最大稳态电流(Imax),单位是安培(A)。这表明它能承受长期工作产生的热量。
独有参数“身份证”:最大允许电容量。这直接定义了它能保护多大的电源电路。
较慢的响应:热时间常数大(约30秒),需要时间加热进入低阻状态,也需要时间冷却复位以备再次启动。
典型应用:
所有开关电源(如手机充电器、电脑电源)的输入端,电机驱动电路,LED驱动电源等。只要有大的平滑电容,就需要它。
▶ 如何识别?:找到参数表中阻值低、电流大、有“最大允许电容”参数的NTC,它就是“保安”。
三、 “稳定器” — 补偿型NTC
核心任务:补偿或抵消电路中其他元件因温度变化产生的性能漂移。
工作形象:
它不像温度计那样前台报告数据,也不像保安那样处理暴力事件。它更像一个幕后“稳定器”或“平衡器”。当温度变化导致电路某部分参数“跑偏”时,它通过自身阻值的反向变化,自动将其“拉”回正轨。
参数特征:
电阻值范围广:从几十Ω到几百kΩ都有,完全取决于补偿电路的需要。
重在“匹配”而非“绝对精度”:对B值的一致性和稳定性要求高,但对R25的绝对精度要求介于两者之间(如±5%, ±10%)。它的价值在于其整个R-T曲线与被补偿对象的温漂特性能否完美匹配。
中等功率:额定功率通常为几百毫瓦,大于测温型但远小于功率型。它工作在信号层面,但允许比测温型稍大的电流。
无强电参数:同样没有Imax和C。
型号与描述:规格书通常会明确标注 “补偿型”。
典型应用:
晶体管/运算放大器偏置电路:补偿Vbe或放大倍数的温漂,防止电路失真。
线圈补偿:与铜线绕组(正温度系数)串联,抵消其电阻随温度的升高,用于精密电流控制。
晶体振荡器温补网络:在TCXO中用于稳定时钟频率。
▶ 如何识别?:看到一个参数像“不那么精确的测温型NTC”,且规格书明确写有 “用于补偿” 的,它就是“稳定器”。
总结:
NTC热敏电阻的这三种角色,展现了同一物理特性在不同应用场景下的智慧。下次当您在电路中遇到NTC时,不妨先问自己三个问题:
这里需要知道温度吗? ->测温型
这里有关机后再开机的冲击风险吗? ->浪涌抑制型
这里的性能会随温度变化而不稳吗? -> 补偿型
通过这种方式,您不仅能快速识别它们,更能深刻地理解电路设计者的意图,从而进行正确的设计、选型和故障分析。


















 919
919

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









