



 本文详细介绍了一种合并两个二叉树的算法,当两棵树的节点重叠时,节点值相加;否则,保留非空节点。示例展示了如何从根节点开始,递归地合并左右子树。
本文详细介绍了一种合并两个二叉树的算法,当两棵树的节点重叠时,节点值相加;否则,保留非空节点。示例展示了如何从根节点开始,递归地合并左右子树。
合并二叉树
给定两个二叉树,想象当你将它们中的一个覆盖到另一个上时,两个二叉树的一些节点便会重叠。
你需要将他们合并为一个新的二叉树。合并的规则是如果两个节点重叠,那么将他们的值相加作为节点合并后的新值,否则不为 NULL 的节点将直接作为新二叉树的节点。
示例 1:
输入:

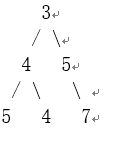
输出:
合并后的树:
注意: 合并必须从两个树的根节点开始。
1 /** 2 * Definition for a binary tree node. 3 * public class TreeNode { 4 * int val; 5 * TreeNode left; 6 * TreeNode right; 7 * TreeNode(int x) { val = x; } 8 * } 9 */ 10 class Solution { 11 public TreeNode mergeTrees(TreeNode t1, TreeNode t2) { 12 if(t1!=null&&t2!=null) t1.val=t1.val+t2.val; 13 if(t1==null&&t2!=null){ 14 t1=new TreeNode(t2.val); 15 } 16 if(t2!=null){ 17 t1.left=mergeTrees(t1.left,t2.left); 18 t1.right=mergeTrees(t1.right,t2.right); 19 } 20 return t1; 21 } 22 }

















 982
982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









