



一、车道线曲线方程
坐标系:车辆坐标系(x:纵向,上正下负,y:横向,坐正右负);x:纵向距离;y:横向距离;
:横向偏移,即车辆当前位置(x=0)处,车道线与车辆参考线的横向距离。它直接回答了“我现在离车道线有多远?”这个问题。这是横向误差 的最直接体现。在车道保持辅助系统(LKA)中,控制器的核心目标之一就是将这个误差减小到零。
:航向角偏移,车道线在车辆当前位置的切线斜率。这个斜率直接对应于车辆应该保持的航向角。
,其中
θ 是理想航向角。这是航向误差 的直接来源。如果车辆当前的航向角与 不一致,就产生了航向误差。控制器需要同时调整方向以消除横向误差和航向误差,才能平稳地保持在车道中心。
:曲率,车道线在车辆当前位置的曲率的线性组成部分。曲率
κ 描述了道路的弯曲程度,κ ≈ y''(0) = (这是一个近似,在曲率不大时非常准确)。=
越大,表示道路弯曲得越厉害。此参数让控制器能够预知前方的弯道。例如,如果检测到
是一个很大的正值,控制器就知道即将进入一个左转弯,可以提前做好转向准备,使控制更加平滑和稳定。
:车道线曲率的变化率。它描述了道路弯曲程度是在增加还是在减少。
> 0:曲率正在增加,例如,从一个直道进入一个越来越急的弯道(螺旋线入口)。 < 0:曲率正在减小,例如,从一个急弯道中逐渐驶出(回旋曲线出口)。
二、车辆运动学建模
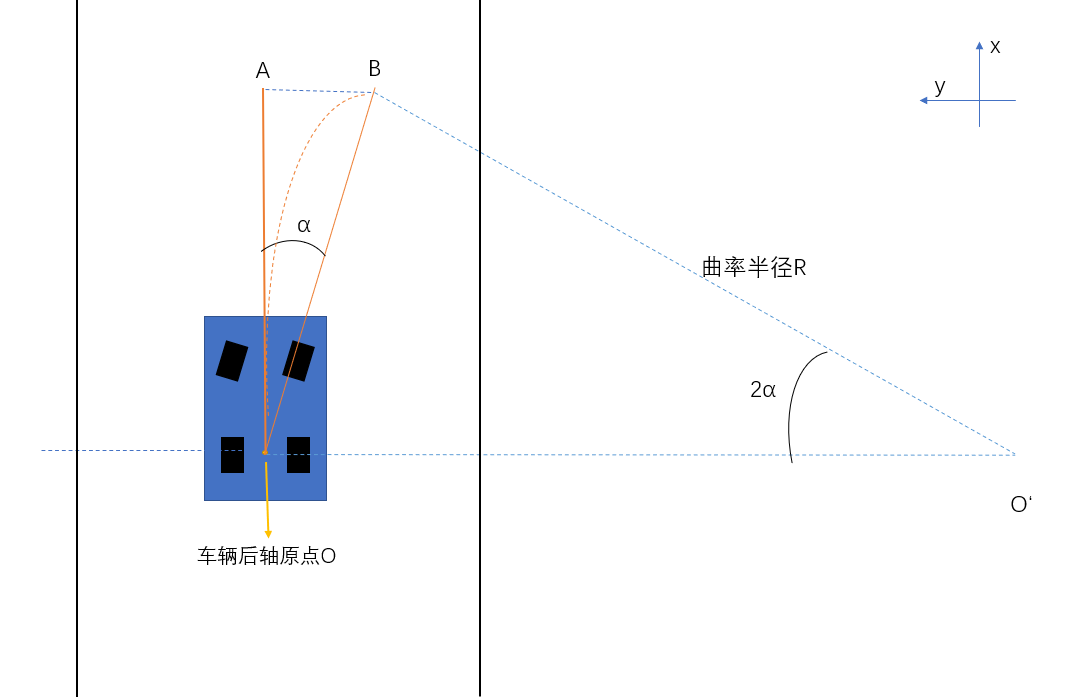
假设场景如图所示,两条黑色直线为路沿,车辆在当前道路行驶过程中,方向盘发生向右偏移,车辆将沿曲线OB进行行驶,我们需要得到横向偏移误差和航向角偏差
。已知OA为下一时刻的纵向行驶距离,轨迹OA为原控制行驶轨迹,轨迹方程
。
可以进行如下计算:
得到,
当R足够大时,。
;




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











