




 本文综述了多种停车泊位检测方法,包括自由空间基、停车标记基、用户界面基及基础设施基等方法。自由空间基方法依赖于相邻车辆定位;停车标记基方法虽不依赖相邻车辆但受标记遮挡影响;用户界面基方法作为自动方法的补充易于实施;基础设施基方法利用预建地图和传感器实现车辆定位。
本文综述了多种停车泊位检测方法,包括自由空间基、停车标记基、用户界面基及基础设施基等方法。自由空间基方法依赖于相邻车辆定位;停车标记基方法虽不依赖相邻车辆但受标记遮挡影响;用户界面基方法作为自动方法的补充易于实施;基础设施基方法利用预建地图和传感器实现车辆定位。
目录
Research Review on Parking Space Detection Method
Survey Articles
Research Review on Parking Space Detection Method
https://www.mdpi.com/2073-8994/13/1/128/pdf
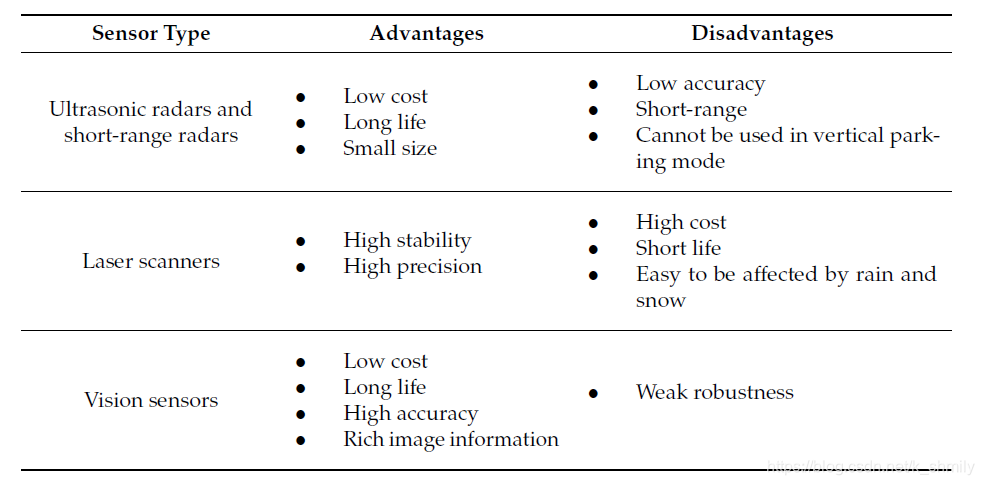
vision and non-visual detection methods
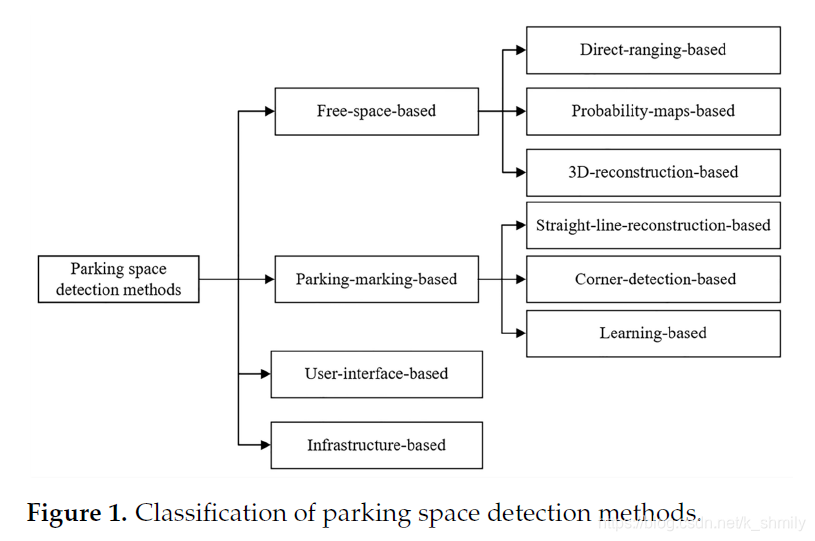
- Free-space-based: only needs to install cheap ranging sensors on the vehicle, but it is completely dependent on the adjacent parked vehicles.
- Parking-marking-based: does not depend on the presence and location of adjacent parked vehicles. with parking space markings, and it is not robust to situations where the parking space markings are blocked or blurred.
- User-inferface-based: depend on the driver’smanual input of specific information. it is useful as a backup tool for the failure of the automatic method and it is easy to implement.
- Infrastructure-based: use pre-built maps and underlying sensors to specify the target location through vehicle-to-infrastructure communication
Various Methos Articles

















 1490
1490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









