



一 前言
工程师常常需要为纷繁而复杂的工程问题寻找一个个简单的数学模型,弹簧阻尼模型算是我脑海中的常客,它曾经帮助我回答了一个汽车零件共振峰估计问题,最近的一个窄带信号频率估计的题目,也需要它和我一起完成答卷。我的智商有限,没见过世面,在此仅将一些破碎的想法拾掇拾掇,记录下来,就像小朋友整理卡通玩具一样。
一般的,人们会用如下一个非齐次二阶常微分来对模型进行抽象。
md2xdt2+αdxdt+kx=F(t)(1.1)m\frac{{{d}^{2}}x}{d{{t}^{2}}}+\alpha \frac{dx}{dt}+kx=F(t)\tag{1.1}mdt2d2x+αdtdx+kx=F(t)(1.1)
式中,mmm是滑块质量,α\alphaα是阻尼系数,kkk是弹簧刚度系数,xxx是滑块偏移平衡位置的距离,F(t)F(t)F(t)是施迫函数(forcing function),就是工程师理解的外力。
式(1.1)复杂了点,二阶方程居然有mmm、α\alphaα、kkk三个系数,我的智商跟不上,需要稍微简化一点。两边同时除mmm,得
d2xdt2+αmdxdt+kmx=1mF(t)\frac{{{d}^{2}}x}{d{{t}^{2}}}+\frac{\alpha }{m}\frac{dx}{dt}+\frac{k}{m}x=\frac{1}{m}F(t)dt2d2x+mαdtdx+mkx=m1F(t)
即
d2xdt2+a1dxdt+a2x=F~(t)(1.2)\frac{{{d}^{2}}x}{d{{t}^{2}}}+{{a}_{1}}\frac{dx}{dt}+{{a}_{2}}x=\tilde{F}(t)\tag{1.2}dt2d2x+a1dtdx+a2x=F~(t)(1.2)
尽管如此,但我还是先以式(1.1)来展开讨论,该式物理意义明确。
二 求解共振频率
显然的,该模型描述的是受迫运动,工程师的关注点在于,共振频率在哪里,因为这是一个系统出事情的地方。方法应该是多种多样的,我以我熟悉的方式来解一下。
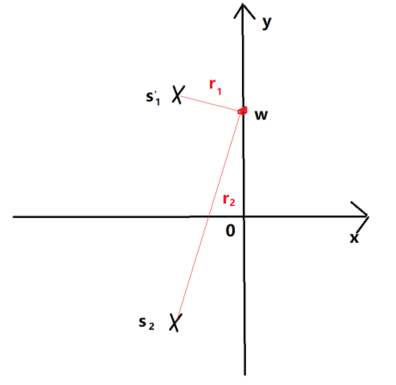
我们不妨设想一下,当F(t)F(t)F(t)是白噪声,或者是冲激函数时,xxx将会有怎样的运动轨迹呢。这个问题等效于下图的描述
图1.1

于是,问题便转到对模型传递函数的讨论。
2.1 代数法
对式(1.1)两边求拉氏变换,写出传递函数
H(s)=1ms2+αs+k(2.1)\text{H}(s)=\frac{1}{m{{s}^{2}}+\alpha s+k}\tag{2.1}H(s)=ms2+αs+k1(2.1)
现实世界仅在虚数轴上受到影响,不妨将s=jω\text{s=j}\omegas=jω带入上式
H(jω)=1−mω2+jαω+k(2.2)\text{H}(j\omega )=\frac{1}{-m{{\omega }^{2}}+j\alpha \omega +k}\tag{2.2}H(jω)=−mω2+jαω+k1(2.2)
∣H(jω)∣2=1∣−mω2+jαω+k∣2(2.3){{\left| \text{H}(j\omega ) \right|}^{2}}=\frac{1}{{{\left| -m{{\omega }^{2}}+j\alpha \omega +k \right|}^{2}}}\tag{2.3}∣H(jω)∣2=∣−mω2+jαω+k∣21(2.3)
∣H(jω)∣2=1(k−mω2)2+α2ω2(2.4){{\left| \text{H}(j\omega ) \right|}^{2}}=\frac{1}{{{\left( k-m{{\omega }^{2}} \right)}^{2}}+{{\alpha }^{2}}{{\omega }^{2}}}\tag{2.4}∣H(jω)∣2=(k−mω2)2+α2ω21(2.4)
当分母取最小值,解出的ω\omegaω即共振频率。令B(ω)=(k−mω2)2+α2ω2\begin{matrix}\text{B}(\omega ) \end{matrix}={{\left( k-m{{\omega }^{2}} \right)}^{2}}+{{\alpha }^{2}}{{\omega }^{2}}B(ω)=(k−mω2)2+α2ω2
展开可得
B(ω)=m2ω4+α2ω2−2kmω2+k2\begin{matrix}\text{B}(\omega ) \end{matrix}={{m}^{2}}{{\omega }^{4}}+{{\alpha }^{2}}{{\omega }^{2}}-2km{{\omega }^{2}}+{{k}^{2}}B(ω)=m2ω4+α2ω2−2kmω2+k2
对ω\omegaω求导,可得
dBdω=4m2ω3+2α2ω−4kmω\begin{matrix}\frac{dB}{d\omega }\end{matrix}=4{{m}^{2}}{{\omega }^{3}}+2{{\alpha }^{2}}\omega -4km\omegadωdB=4m2ω3+2α2ω−4kmω
令dBdω=0\begin{matrix}\frac{dB}{d\omega }\end{matrix}=0dωdB=0,解出
ω2=2km−α22m2(2.5){{\omega }^{2}}=\frac{2km-{{\alpha }^{2}}}{2{{m}^{2}}}\tag{2.5}ω2=2m22km−α2(2.5)
即
ω=ωr=km−α22m2(2.6)\omega ={{\omega }_{r}}=\sqrt{\frac{k}{m}-\frac{{{\alpha }^{2}}}{2{{m}^{2}}}}\tag{2.6}ω=ωr=mk−2m2α2(2.6)
可以交作业了。
但是,我终究不是个聪明人,不喜欢把公式摆弄来摆弄去,总想着寻找一种几何作图的方法,就像小朋友画画一样。
2.2 几何法
由式(2.1)启发出几何方法是自然的,如果学过复分析的话(在后面的叙述中,读者也不难发现这点)。
令H(s)\text{H}(s)H(s)分母为0,求出极点。
ms2+αs+k=0m{{s}^{2}}+\alpha s+k=0ms2+αs+k=0
如果系统是共振的,或者说欠阻尼的,就要求
α2−4mk<0{{\alpha }^{2}}-4mk<0α2−4mk<0
求出极点
s12=−α±j4mk−α22m(2.7){{s}_{12}}=\frac{-\alpha \pm j\sqrt{4mk-{{\alpha }^{2}}}}{2m}\tag{2.7}s12=2m−α±j4mk−α2(2.7)
另外,对临界阻尼系统,极点是s12=−α2m{{s}_{12}}=-\frac{\alpha }{2m}s12=−2mα,过阻尼系统的极点则是s12=−α±α2−4mk2m{{s}_{12}}=\frac{-\alpha \pm \sqrt{{{\alpha }^{2}}-4mk}}{2m}s12=2m−α±α2−4mk。画出欠阻尼系统的极点图,并且在虚数轴上取值为ω\omegaω,两个极点到ω\omegaω的距离分别为r1{{r}_{1}}r1、r2{{r}_{2}}r2。
图1.2
令a=α2m(2.8)a=\frac{\alpha }{2m}\tag{2.8}a=2mα(2.8),b=4mk−α22m(2.9)b=\frac{\sqrt{4mk-{{\alpha }^{2}}}}{2m}\tag{2.9}b=2m4mk−α2(2.9),可得到
图1.3
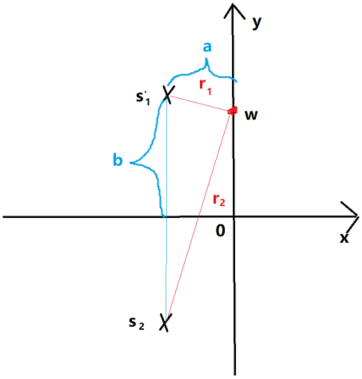
当1r11r2\frac{1}{{{r}_{1}}}\frac{1}{{{r}_{2}}}r11r21取最大值时,即r1r2{{r}_{1}}{{r}_{2}}r1r2取最大值时的ω\omegaω就是共振频率点ωr{\omega }_{r}ωr
让我们看图写作。
{r12=a2+(b−ω)2r22=a2+(b+ω)2\left\{ \begin{matrix}
{{r}_{1}}^{2}={{a}^{2}}+{{\left( b-\omega \right)}^{2}} \\
{{r}_{2}}^{2}={{a}^{2}}+{{\left( b+\omega \right)}^{2}} \\
\end{matrix} \right.{r12=a2+(b−ω)2r22=a2+(b+ω)2
可得
r12r22=(a2+(b−ω)2)(a2+(b+ω)2){{r}_{1}}^{2}{{r}_{2}}^{2}=\left( {{a}^{2}}+{{\left( b-\omega \right)}^{2}} \right)\left( {{a}^{2}}+{{\left( b+\omega \right)}^{2}} \right)r12r22=(a2+(b−ω)2)(a2+(b+ω)2)
展开
r12r22=a4+2a2b2+2a2ω2+b4−2b2ω2+ω4{{r}_{1}}^{2}{{r}_{2}}^{2}={{a}^{4}}+2{{a}^{2}}{{b}^{2}}+2{{a}^{2}}{{\omega }^{2}}+{{b}^{4}}-2{{b}^{2}}{{\omega }^{2}}+{{\omega }^{4}}r12r22=a4+2a2b2+2a2ω2+b4−2b2ω2+ω4
令W=r12r22W={{r}_{1}}^{2}{{r}_{2}}^{2}W=r12r22,并且对ω\omegaω求导可得
dWdω=4ω3+4a2ω−4b2ω\frac{dW}{d\omega }=4{{\omega }^{3}}+4{{a}^{2}}\omega -4{{b}^{2}}\omegadωdW=4ω3+4a2ω−4b2ω
令
dWdω=0\frac{dW}{d\omega }=0dωdW=0
得
ω2=b2−a2{{\omega }^{2}}={{b}^{2}}-{{a}^{2}}ω2=b2−a2
将 a=α2ma=\frac{\alpha }{2m}a=2mα,b=4mk−α22mb=\frac{\sqrt{4mk-{{\alpha }^{2}}}}{2m}b=2m4mk−α2 代入上式即可求出ωr{{\omega }_{r}}ωr 。
可以重新提交作业了。
三 AR谱估计
故事还没有结束。我们回头看一眼式(1.2),这是微分方程,我这类的工程师经常和差分方程打交道,微分方程和差分方程,在我看来是没有什么区别的(一个是不可数无穷维向量,一个是可数无穷维向量,当后者的间隔△t\vartriangle t△t趋于无穷小,差分便转化成了微分)。即我们可以进一步思考,这是个数字化系统的话,又该如何求解。
式(1.2)经过数字化,我们就得到了一个AR2模型。
ω[t]+a1ω[t−1]+a2ω[t−2]=e[t](3.1)\omega \left[ t \right]+{{a}_{1}}\omega \left[ t-1 \right]+{{a}_{2}}\omega \left[ t-2 \right]=e\left[ t \right]\tag{3.1}ω[t]+a1ω[t−1]+a2ω[t−2]=e[t](3.1)
让我们仿照连续模型,拿起A4纸和笔写写画画吧。
3.1 代数法
对式(3.1)左右两端做拉氏变换,列出传递函数
G=11+a1Z−1+a2Z−2(3.2)G=\frac{1}{1+{{a}_{1}}{{Z}^{-1}}+{{a}_{2}}{{Z}^{-2}}}\tag{3.2}G=1+a1Z−1+a2Z−21(3.2)
单位圆上使得∣G∣\left| G \right|∣G∣最大的ω\omegaω就是ωr{{\omega }_{r}}ωr。
将Z−1=eiw{{Z}^{-1}}={{e}^{iw}}Z−1=eiw带入式(3.2),得
G=11+a1eiw+a2ei2wG=\frac{1}{1+{{a}_{1}}{{e}^{iw}}+{{a}_{2}}{{e}^{i2w}}}G=1+a1eiw+a2ei2w1
用欧拉公式展开,得
G=11+a1cosω+ia1sinω+a2cos2ω+ia2sin2ωG=\frac{1}{1+{{a}_{1}}\cos \omega +i{{a}_{1}}\sin \omega +{{a}_{2}}\cos 2\omega +i{{a}_{2}}\sin 2\omega }G=1+a1cosω+ia1sinω+a2cos2ω+ia2sin2ω1
G=1(1+a1cosω+a2cos2ω)+i(a1sinω+a2sin2ω)G=\frac{1}{\left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)+i\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right)}G=(1+a1cosω+a2cos2ω)+i(a1sinω+a2sin2ω)1
模长
∣G∣=1∣(1+a1cosω+a2cos2ω)+i(a1sinω+a2sin2ω)∣\left| G \right|=\frac{1}{\left| \left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)+i\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right) \right|}∣G∣=∣(1+a1cosω+a2cos2ω)+i(a1sinω+a2sin2ω)∣1
∣G∣=1(1+a1cosω+a2cos2ω)2+(a1sinω+a2sin2ω)2\left| G \right|=\frac{1}{\sqrt{{{\left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)}^{2}}+{{\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right)}^{2}}}}∣G∣=(1+a1cosω+a2cos2ω)2+(a1sinω+a2sin2ω)21
当分母最小时,∣G∣\left| G \right|∣G∣最大。令
B=(1+a1cosω+a2cos2ω)2+(a1sinω+a2sin2ω)2B={{\left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)}^{2}}+{{\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right)}^{2}}B=(1+a1cosω+a2cos2ω)2+(a1sinω+a2sin2ω)2
展开整理得
B=(1+a1cosω+a2cos2ω)(1+a1cosω+a2cos2ω)+(a1sinω+a2sin2ω)(a1sinω+a2sin2ω)B=\left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)\left( 1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega \right)+\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right)\left( {{a}_{1}}\sin \omega +{{a}_{2}}\sin 2\omega \right)B=(1+a1cosω+a2cos2ω)(1+a1cosω+a2cos2ω)+(a1sinω+a2sin2ω)(a1sinω+a2sin2ω)
B=1+a1cosω+a2cos2ω+a1cosω+a12cos2ω+a1a2cosωcos2ω+a2cos2ω.+a1a2cosωcos2ω+a22cos22ω+a12sin2ω+a22sin22ω+2a1sinωa2sin2ωB=1+{{a}_{1}}\cos \omega +{{a}_{2}}\cos 2\omega +{{a}_{1}}\cos \omega +{{a}_{1}}^{2}{{\cos }^{2}}\omega +{{a}_{1}}{{a}_{2}}\cos \omega \cos 2\omega +{{a}_{2}}\cos 2\omega .+{{a}_{1}}{{a}_{2}}\cos \omega \cos 2\omega +{{a}_{2}}^{2}{{\cos }^{2}}2\omega +{{a}_{1}}^{2}{{\sin }^{2}}\omega +{{a}_{2}}^{2}{{\sin }^{2}}2\omega +2{{a}_{1}}\sin \omega {{a}_{2}}\sin 2\omegaB=1+a1cosω+a2cos2ω+a1cosω+a12cos2ω+a1a2cosωcos2ω+a2cos2ω.+a1a2cosωcos2ω+a22cos22ω+a12sin2ω+a22sin22ω+2a1sinωa2sin2ω
B=1+2a1cosω+2a2cos2ω+a12cos2ω+2a1a2cosωcos2ω+a22cos22ω+a12sin2ω+a22sin22ω+2a1sinωa2sin2ωB=1+2{{a}_{1}}\cos \omega +2{{a}_{2}}\cos 2\omega +{{a}_{1}}^{2}{{\cos }^{2}}\omega +2{{a}_{1}}{{a}_{2}}\cos \omega \cos 2\omega +{{a}_{2}}^{2}{{\cos }^{2}}2\omega +{{a}_{1}}^{2}{{\sin }^{2}}\omega +{{a}_{2}}^{2}{{\sin }^{2}}2\omega +2{{a}_{1}}\sin \omega {{a}_{2}}\sin 2\omega B=1+2a1cosω+2a2cos2ω+a12cos2ω+2a1a2cosωcos2ω+a22cos22ω+a12sin2ω+a22sin22ω+2a1sinωa2sin2ω
B=1+2a1cosω+2a2cos2ω+a12+2a1a2cosωcos2ω+a22+2a1a2sinωsin2ωB=1+2{{a}_{1}}\cos \omega +2{{a}_{2}}\cos 2\omega +{{a}_{1}}^{2}+2{{a}_{1}}{{a}_{2}}\cos \omega \cos 2\omega +{{a}_{2}}^{2}+2{{a}_{1}}{{a}_{2}}\sin \omega \sin 2\omegaB=1+2a1cosω+2a2cos2ω+a12+2a1a2cosωcos2ω+a22+2a1a2sinωsin2ω
令dBdω=0\frac{dB}{d\omega }=0dωdB=0,可得
−2a1sinω−4a2sin2ω−2a1a2sinωcos2ω−4a1a2cosωsin2ω+2a1a2cosωsin2ω+4a1a2sinωcos2ω=0-2{{a}_{1}}\sin \omega -4{{a}_{2}}\sin 2\omega -2{{a}_{1}}{{a}_{2}}\sin \omega \cos 2\omega -4{{a}_{1}}{{a}_{2}}\cos \omega \sin 2\omega +2{{a}_{1}}{{a}_{2}}\cos \omega \sin 2\omega +4{{a}_{1}}{{a}_{2}}\sin \omega \cos 2\omega =0−2a1sinω−4a2sin2ω−2a1a2sinωcos2ω−4a1a2cosωsin2ω+2a1a2cosωsin2ω+4a1a2sinωcos2ω=0
−a1sinω−2a2sin2ω−a1a2sinωcos2ω−2a1a2cosωsin2ω+a1a2cosωsin2ω+2a1a2sinωcos2ω=0-{{a}_{1}}\sin \omega -2{{a}_{2}}\sin 2\omega -{{a}_{1}}{{a}_{2}}\sin \omega \cos 2\omega -2{{a}_{1}}{{a}_{2}}\cos \omega \sin 2\omega +{{a}_{1}}{{a}_{2}}\cos \omega \sin 2\omega +2{{a}_{1}}{{a}_{2}}\sin \omega \cos 2\omega =0−a1sinω−2a2sin2ω−a1a2sinωcos2ω−2a1a2cosωsin2ω+a1a2cosωsin2ω+2a1a2sinωcos2ω=0
−a1sinω−2a2sin2ω+a1a2sinωcos2ω−a1a2cosωsin2ω=0-{{a}_{1}}\sin \omega -2{{a}_{2}}\sin 2\omega +{{a}_{1}}{{a}_{2}}\sin \omega \cos 2\omega -{{a}_{1}}{{a}_{2}}\cos \omega \sin 2\omega =0−a1sinω−2a2sin2ω+a1a2sinωcos2ω−a1a2cosωsin2ω=0
−a1sinω−2a2sin2ω+a1a212(sin3ω−sinω)−a1a212(sin3ω+sinω)=0-{{a}_{1}}\sin \omega -2{{a}_{2}}\sin 2\omega +{{a}_{1}}{{a}_{2}}\frac{1}{2}(\sin 3\omega -\sin \omega )-{{a}_{1}}{{a}_{2}}\frac{1}{2}(\sin 3\omega +\sin \omega )=0−a1sinω−2a2sin2ω+a1a221(sin3ω−sinω)−a1a221(sin3ω+sinω)=0
−a1sinω−2a2sin2ω+(12a1a2sin3ω−12a1a2sinω)−(12a1a2sin3ω+12a1a2sinω)=0-{{a}_{1}}\sin \omega -2{{a}_{2}}\sin 2\omega +(\frac{1}{2}{{a}_{1}}{{a}_{2}}\sin 3\omega -\frac{1}{2}{{a}_{1}}{{a}_{2}}\sin \omega )-(\frac{1}{2}{{a}_{1}}{{a}_{2}}\sin 3\omega +\frac{1}{2}{{a}_{1}}{{a}_{2}}\sin \omega )=0−a1sinω−2a2sin2ω+(21a1a2sin3ω−21a1a2sinω)−(21a1a2sin3ω+21a1a2sinω)=0
−a1sinω−2a2sin2ω−a1a2sinω=0-{{a}_{1}}\sin \omega -2{{a}_{2}}\sin 2\omega -{{a}_{1}}{{a}_{2}}\sin \omega =0−a1sinω−2a2sin2ω−a1a2sinω=0
−a1sinω−4a2sinωcosω−a1a2sinω=0-{{a}_{1}}\sin \omega -4{{a}_{2}}\sin \omega \cos \omega -{{a}_{1}}{{a}_{2}}\sin \omega =0−a1sinω−4a2sinωcosω−a1a2sinω=0
−4a2cosω=(a1a2+a1)-4{{a}_{2}}\cos \omega =({{a}_{1}}{{a}_{2}}+{{a}_{1}})−4a2cosω=(a1a2+a1)
cosω=−(a1a2+a1)4a2\cos \omega =-\frac{({{a}_{1}}{{a}_{2}}+{{a}_{1}})}{4{{a}_{2}}}cosω=−4a2(a1a2+a1)
好,作业完成。
如果知道采样时间Ts{{T}_{s}}Ts,那么可以求出以Hz为单位的频率
fr=12πTsarccos(−(a1a2+a1)4a2)(3.3){{\text{f}}_{\text{r}}}=\frac{1}{2\pi {{T}_{s}}}\arccos (-\frac{({{a}_{1}}{{a}_{2}}+{{a}_{1}})}{4{{a}_{2}}})\tag{3.3}fr=2πTs1arccos(−4a2(a1a2+a1))(3.3)
3.2 几何法
由式(3.2)得
G=Z2Z2+a1Z1+a2(3.4)G=\frac{{{Z}^{2}}}{{{Z}^{2}}+{{a}_{1}}{{Z}^{1}}+{{a}_{2}}}\tag{3.4}G=Z2+a1Z1+a2Z2(3.4)
可知两个零点在原点,对频率响应的幅度没有影响,可以不用考虑。求极点需要令分母等于0,即
Z2+a1Z1+a2=0{{Z}^{2}}+{{a}_{1}}{{Z}^{1}}+{{a}_{2}}=0Z2+a1Z1+a2=0
求得极点是
Z12=−a1±a12−4a22(3.5){{Z}_{12}}=\frac{-{{a}_{1}}\pm \sqrt{{{a}_{1}}^{2}-4{{a}_{2}}}}{2}\tag{3.5}Z12=2−a1±a12−4a2(3.5)
如果模型能够求出共振频率,要求ZZZ的解存在共轭复数,即要求a12−4a2<0{{a}_{1}}^{2}-4{{a}_{2}}<0a12−4a2<0 。因此
Z12=−a1±i4a2−a122{{Z}_{12}}=\frac{-{{a}_{1}}\pm i\sqrt{4{{a}_{2}}-{{a}_{1}}^{2}}}{2}Z12=2−a1±i4a2−a12
写成实部和虚部的形式
Z12=−a12±i4a2−a122(3.6){{Z}_{12}}=\frac{-{{a}_{1}}}{2}\pm \frac{i\sqrt{4{{a}_{2}}-{{a}_{1}}^{2}}}{2}\tag{3.6}Z12=2−a1±2i4a2−a12(3.6)
再写成极坐标形式
Z=reiw(3.7)Z=r{{e}^{iw}}\tag{3.7}Z=reiw(3.7)
联立式(3.6、式(3.7)解得极点角频率
ω0=arccos−a12a2(3.8){{\omega }_{\text{0}}}=\arccos \frac{-{{a}_{1}}}{2\sqrt{{{a}_{2}}}}\tag{3.8}ω0=arccos2a2−a1(3.8)
画出零极点图

使1r11r2\frac{1}{{{r}_{1}}}\frac{1}{{{r}_{2}}}r11r21最大,即r1r2{{r}_{1}}{{r}_{2}}r1r2最小,即r12r22{{r}_{1}}^{2}{{r}_{2}}^{2}r12r22最小的ω\omegaω就是ωr{{\omega }_{r}}ωr。接下来就是看图写作了。
{r12=c2+1−2ccos(ω0−ω)r22=c2+1−2ccos(ω0+ω)\left\{ \begin{matrix}
{{r}_{1}}^{2}={{c}^{2}}+1-2c\cos ({{\omega }_{0}}-\omega ) \\
{{r}_{2}}^{2}={{c}^{2}}+1-2c\cos ({{\omega }_{0}}+\omega ) \\
\end{matrix} \right.{r12=c2+1−2ccos(ω0−ω)r22=c2+1−2ccos(ω0+ω)
r12r22=(c2+1−2ccos(ω0−ω))(c2+1−2ccos(ω0+ω)){{r}_{1}}^{2}{{r}_{2}}^{2}=\left( {{c}^{2}}+1-2c\cos ({{\omega }_{0}}-\omega ) \right)\left( {{c}^{2}}+1-2c\cos ({{\omega }_{0}}+\omega ) \right)r12r22=(c2+1−2ccos(ω0−ω))(c2+1−2ccos(ω0+ω))
r12r22=((c2+1)−2ccos(ω0−ω))((c2+1)−2ccos(ω0+ω)){{r}_{1}}^{2}{{r}_{2}}^{2}=\left( \left( {{c}^{2}}+1 \right)-2c\cos ({{\omega }_{0}}-\omega ) \right)\left( \left( {{c}^{2}}+1 \right)-2c\cos ({{\omega }_{0}}+\omega ) \right)r12r22=((c2+1)−2ccos(ω0−ω))((c2+1)−2ccos(ω0+ω))
r12r22=((c2+1)−2ccosω0cosω−2csinω0sinω)((c2+1)−2ccosω0cosω+2csinω0sinω){{r}_{1}}^{2}{{r}_{2}}^{2}=\left( \left( {{c}^{2}}+1 \right)-2c\cos {{\omega }_{0}}\cos \omega -2c\sin {{\omega }_{0}}\sin \omega \right)\left( \left( {{c}^{2}}+1 \right)-2c\cos {{\omega }_{0}}\cos \omega +2c\sin {{\omega }_{0}}\sin \omega \right)r12r22=((c2+1)−2ccosω0cosω−2csinω0sinω)((c2+1)−2ccosω0cosω+2csinω0sinω)
r12r22=(c2+1)2−2c(c2+1)cosω0cosω+2c(c2+1)sinω0sinω−2c(c2+1)cosω0cosω+4c2cos2ω0cos2ω−4c2cosω0cosωsinω0sinω−2c(c2+1)sinω0sinω+4c2cosω0cosωsinω0sinω−4c2sin2ω0sin2ω{{r}_{1}}^{2}{{r}_{2}}^{2}={{\left( {{c}^{2}}+1 \right)}^{2}}-2c\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\cos \omega +2c\left( {{c}^{2}}+1 \right)\sin {{\omega }_{0}}\sin \omega -2c\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\cos \omega +4{{c}^{2}}{{\cos }^{2}}{{\omega }_{0}}{{\cos }^{2}}\omega -4{{c}^{2}}\cos {{\omega }_{0}}\cos \omega \sin {{\omega }_{0}}\sin \omega -2c\left( {{c}^{2}}+1 \right)\sin {{\omega }_{0}}\sin \omega +4{{c}^{2}}\cos {{\omega }_{0}}\cos \omega \sin {{\omega }_{0}}\sin \omega -4{{c}^{2}}{{\sin }^{2}}{{\omega }_{0}}{{\sin }^{2}}\omegar12r22=(c2+1)2−2c(c2+1)cosω0cosω+2c(c2+1)sinω0sinω−2c(c2+1)cosω0cosω+4c2cos2ω0cos2ω−4c2cosω0cosωsinω0sinω−2c(c2+1)sinω0sinω+4c2cosω0cosωsinω0sinω−4c2sin2ω0sin2ω
r12r22=(c2+1)2−4c(c2+1)cosω0cosω+4c2cos2ω0cos2ω−4c2sin2ω0sin2ω{{r}_{1}}^{2}{{r}_{2}}^{2}={{\left( {{c}^{2}}+1 \right)}^{2}}-4c\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\cos \omega +4{{c}^{2}}{{\cos }^{2}}{{\omega }_{0}}{{\cos }^{2}}\omega -4{{c}^{2}}{{\sin }^{2}}{{\omega }_{0}}{{\sin }^{2}}\omegar12r22=(c2+1)2−4c(c2+1)cosω0cosω+4c2cos2ω0cos2ω−4c2sin2ω0sin2ω
令d(r12r22)dω=0\frac{d({{r}_{1}}^{2}{{r}_{2}}^{2})}{d\omega }=0dωd(r12r22)=0
4c(c2+1)cosω0sinω−8c2cos2ω0sinωcosω−8c2sin2ω0sinωcosω=04c\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\sin \omega -8{{c}^{2}}{{\cos }^{2}}{{\omega }_{0}}\sin \omega \cos \omega -8{{c}^{2}}{{\sin }^{2}}{{\omega }_{0}}\sin \omega \cos \omega =04c(c2+1)cosω0sinω−8c2cos2ω0sinωcosω−8c2sin2ω0sinωcosω=0
4c(c2+1)cosω0sinω−(8c2cos2ω0+8c2sin2ω0)sinωcosω=04c\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\sin \omega -(8{{c}^{2}}{{\cos }^{2}}{{\omega }_{0}}+8{{c}^{2}}{{\sin }^{2}}{{\omega }_{0}})\sin \omega \cos \omega =04c(c2+1)cosω0sinω−(8c2cos2ω0+8c2sin2ω0)sinωcosω=0
c(c2+1)cosω0sinω=2c2sinωcosωc\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}\sin \omega =2{{c}^{2}}\sin \omega \cos \omegac(c2+1)cosω0sinω=2c2sinωcosω
cosω=(c2+1)cosω02c\cos \omega =\frac{\left( {{c}^{2}}+1 \right)\cos {{\omega }_{0}}}{2c}cosω=2c(c2+1)cosω0
cosω=−(a2+1)a14a2\cos \omega =-\left( {{a}_{2}}+1 \right)\frac{{{a}_{1}}}{4{{a}_{2}}}cosω=−(a2+1)4a2a1
四 最小二乘与参数辨识
假设存在这样一个问题,对于式(1.2)和式(3.1),不知道a1{{a}_{1}}a1、a1{{a}_{1}}a1的情况下如何求出ωr{{\omega }_{r}}ωr,甚至进一步的,连F~(t)\tilde{F}(t)F~(t)或e[t]e\left[ t \right]e[t]也无从得知,只知道他们的某些统计特性,比如,服从Gauss分布的白噪声。这个问题是具有非常现实的工程意义的。设想这样一个题目,一辆车在路上跑,领导让你求出汽车轮毂的ωr{{\omega }_{r}}ωr,给到你的资料仅有加速度传感器输出的振动信号。对于搞车振的工程师来说,这不是难题,求出功率谱密度曲线,找峰值就行了。让我们把题目加深一下,车子边跑着,小ECU实时地把ωr{{\omega }_{r}}ωr算出来,通过CAN BUS发出来。小小的ECU,要内存没内存,要速度没速度,这可怎么办?事实上,就算把PC机搬上来,由于不确定性原理的限制和汽车行驶的非平稳性,也没法做到实时。这样一道题目曾经真切地摆在我面前(在此之前,它和其他更加复杂的问题交织在一起,让两位名校博士交了白卷。也许工科生的数学水平堪忧吧,我大量地检索了相关论文,所有的文献无一幸免地都把极点频率当成了共振频率,而这只是一张A4纸就能算明白的事情)。
解题的关键就在于估计出a1{{a}_{1}}a1、a1{{a}_{1}}a1,这是一个经典的参数辨识问题。
最小二乘是解题的钥匙之一。
4.1 代数法
令
θ=[a1a2]T(4.1)\mathbf{\theta }={{\left[ \begin{matrix}
{{a}_{1}} & {{a}_{2}} \end{matrix} \right]}^{T}}\tag{4.1}θ=[a1a2]T(4.1)
φ(t)=[−ω(t−1)−ω(t−2)]T(4.2)\mathbf{\varphi }(t)={{\left[ \begin{matrix}
-\omega (t-1) & -\omega (t-2) \end{matrix} \right]}^{T}}\tag{4.2}φ(t)=[−ω(t−1)−ω(t−2)]T(4.2)
式(3.1)可以写成
ω(t)=φT(t)θ+e(t)(4.3)\omega (t)={{\mathbf{\varphi }}^{T}}(t)\mathbf{\theta }+e(t)\tag{4.3}ω(t)=φT(t)θ+e(t)(4.3)
当ECU采集到N组数据,可以列出N-2组式(4.3),那么求解出θ\mathbf{\theta }θ便是一件简单的事情了。将N-2组公式列出来。
{ω(3)=φT(3)θ+e(3)ω(4)=φT(4)θ+e(4)ω(5)=φT(5)θ+e(5)...ω(N)=φT(N)θ+e(N)\left\{ \begin{align}
& \omega (3)={{\mathbf{\varphi }}^{T}}(3)\mathbf{\theta }+e(3) \\
& \omega (4)={{\mathbf{\varphi }}^{T}}(4)\mathbf{\theta }+e(4) \\
& \omega (5)={{\mathbf{\varphi }}^{T}}(5)\mathbf{\theta }+e(5) \\
& ... \\
& \omega (N)={{\mathbf{\varphi }}^{T}}(N)\mathbf{\theta }+e(N) \\
\end{align} \right.⎩⎨⎧ω(3)=φT(3)θ+e(3)ω(4)=φT(4)θ+e(4)ω(5)=φT(5)θ+e(5)...ω(N)=φT(N)θ+e(N)
改成矩阵形式,令
ω=[ω(3)ω(4)ω(5)...ω(N)]T\mathbf{\omega }={{\left[ \begin{matrix}
\omega (3) & \omega (4) & \omega (5) & ... & \omega (N) \\
\end{matrix} \right]}^{T}}ω=[ω(3)ω(4)ω(5)...ω(N)]T
ψ=[φT(3)φT(4)φT(5)...φT(N)]\mathbf{\psi }=\left[ \begin{matrix}
{{\mathbf{\varphi }}^{T}}(3) \\
{{\mathbf{\varphi }}^{T}}(4) \\
{{\mathbf{\varphi }}^{T}}(5) \\
... \\
{{\mathbf{\varphi }}^{T}}(N) \\
\end{matrix} \right]ψ=φT(3)φT(4)φT(5)...φT(N)
e=[e(3)e(4)e(5)...e(N)]T\mathbf{e}={{\left[ \begin{matrix}
e(3) & e(4) & e(5) & ... & e(N) \\
\end{matrix} \right]}^{T}}
e=[e(3)e(4)e(5)...e(N)]T
可得
ω=ψθ+e(4.4)\mathbf{\omega }=\mathbf{\psi \theta }+\mathbf{e}\tag{4.4}ω=ψθ+e(4.4)
构建目标函数
J(θ)=∑t=3N(ω−φT(t)θ)2J(\mathbf{\theta })=\sum\limits_{t=3}^{N}{{{(\omega -{{\mathbf{\varphi }}^{T}}(t)\mathbf{\theta })}^{2}}}J(θ)=t=3∑N(ω−φT(t)θ)2
为使J(θ)J(\mathbf{\theta })J(θ)最小,可以令
∂J∂θ=0\frac{\partial J}{\partial \mathbf{\theta }}=0∂θ∂J=0
∂∂θ[∑t=3N(ω−φT(t)θ)2]=0\frac{\partial }{\partial \mathbf{\theta }}\left[ \sum\limits_{t=3}^{N}{{{(\omega -{{\mathbf{\varphi }}^{T}}(t)\mathbf{\theta })}^{2}}} \right]=0∂θ∂[t=3∑N(ω−φT(t)θ)2]=0
即
∂∂θ[(ω−ψθ)T(ω−ψθ)]=0\frac{\partial }{\partial \mathbf{\theta }}\left[ {{(\mathbf{\omega }-\mathbf{\psi \theta })}^{T}}(\mathbf{\omega }-\mathbf{\psi \theta }) \right]=0∂θ∂[(ω−ψθ)T(ω−ψθ)]=0
可得
θ=(ψTψ)−1ψTω(4.5)\mathbf{\theta }={{({{\mathbf{\psi }}^{T}}\mathbf{\psi })}^{-1}}{{\mathbf{\psi }}^{T}}\mathbf{\omega }\tag{4.5}θ=(ψTψ)−1ψTω(4.5)
4.2 几何法
上述最小二乘的代数法解题思路,是使用最广泛,愚笨如我,总是喜欢几何法。在我看来,最小二乘,就是在希尔伯特空间上的一个正交投影而已。
对于式(4.4)的求解,即寻找一个参数θ\mathbf{\theta }θ,使得∣e∣=∣ω−ψθ∣\left| \mathbf{e} \right|=\left| \mathbf{\omega }-\mathbf{\psi \theta } \right|∣e∣=∣ω−ψθ∣最小。我们可以将ω{\omega}ω看成Euclidean空间RN{{\text{R}}^{\text{N}}}RN中的向量,同样的,把矩阵ψ\mathbf{\psi }ψ的两个列向量
ψ1=[ω(1)ω(2)ω(3)...ω(N−2)]T{{\mathbf{\psi }}_{1}}={{\left[ \begin{matrix}
\omega (1) & \omega (2) & \omega (3) & ... & \omega (N-2) \\
\end{matrix} \right]}^{T}}ψ1=[ω(1)ω(2)ω(3)...ω(N−2)]T
ψ2=[ω(2)ω(3)ω(4)...ω(N−1)]T{{\mathbf{\psi }}_{2}}={{\left[ \begin{matrix}
\omega (2) & \omega (3) & \omega (4) & ... & \omega (N-1) \\
\end{matrix} \right]}^{T}}ψ2=[ω(2)ω(3)ω(4)...ω(N−1)]T
也看成为RN{{\text{R}}^{\text{N}}}RN中的向量,那么ψ1{{\mathbf{\psi }}_{1}}ψ1和ψ2{{\mathbf{\psi }}_{2}}ψ2就可以张成一个二维子空间U=span(ψ1,ψ1)∈RN\text{U=span}({{\mathbf{\psi }}_{1}},{{\mathbf{\psi }}_{1}})\in {{R}^{N}}U=span(ψ1,ψ1)∈RN。问题就转变成了在U\text{U}U中寻找一个向量ψθ=a1ψ1+a2ψ2\mathbf{\psi \theta }={{a}_{1}}{{\mathbf{\psi }}_{1}}+{{a}_{2}}{{\mathbf{\psi }}_{2}}ψθ=a1ψ1+a2ψ2,使得∣ω−ψθ∣\left| \mathbf{\omega }-\mathbf{\psi \theta } \right|∣ω−ψθ∣最小。显然的,这时候的ψθ\mathbf{\psi \theta }ψθ是ω\mathbf{\omega }ω在U\text{U}U上的投影,ω−ψθ\mathbf{\omega }-\mathbf{\psi \theta }ω−ψθ和U\text{U}U正交。
即对于∀γ∈U\forall \mathbf{\gamma }\in \text{U}∀γ∈U,有内积γT(ω−ψθ)=0{{\mathbf{\gamma }}^{T}}\left( \mathbf{\omega }-\mathbf{\psi \theta } \right)=0γT(ω−ψθ)=0,γ\mathbf{\gamma }γ有现成的,即ψ1{{\mathbf{\psi }}_{1}}ψ1和ψ2{{\mathbf{\psi }}_{2}}ψ2。
{ψ1T(ω−ψθ)=0ψ2T(ω−ψθ)=0\left\{ \begin{matrix}
\mathbf{\psi }_{1}^{T}\left( \mathbf{\omega }-\mathbf{\psi \theta } \right)=0 \\
\mathbf{\psi }_{2}^{T}\left( \mathbf{\omega }-\mathbf{\psi \theta } \right)=0 \\
\end{matrix} \right.{ψ1T(ω−ψθ)=0ψ2T(ω−ψθ)=0
合起来写就是
ψT(ω−ψθ)=0{{\mathbf{\psi }}^{T}}\left( \mathbf{\omega }-\mathbf{\psi \theta } \right)=0ψT(ω−ψθ)=0
ψTω−ψTψθ=0{{\mathbf{\psi }}^{T}}\mathbf{\omega }-{{\mathbf{\psi }}^{T}}\mathbf{\psi \theta }=0ψTω−ψTψθ=0
θ=(ψTψ)−1ψTω\mathbf{\theta }={{\left( {{\mathbf{\psi }}^{T}}\mathbf{\psi } \right)}^{-1}}{{\mathbf{\psi }}^{T}}\mathbf{\omega }θ=(ψTψ)−1ψTω
4.3 递归最小二乘
当数据量比较大的时候,式(4.5)求解起来就比较耗时了,需要寻求一种递推的方式进行求解。在这种情形下,θ\mathbf{\theta }θ就可以看成是数据项nnn的函数θN{{\mathbf{\theta }}_{\text{N}}}θN,其中的推导过程是纯粹的游戏。
θN=(ψNTψN)−1ψNTωN{{\mathbf{\theta }}_{\text{N}}}={{\left( {{\mathbf{\psi }}_{N}}^{\text{T}}{{\mathbf{\psi }}_{N}} \right)}^{-1}}{{\mathbf{\psi }}_{N}}^{\text{T}}{{\mathbf{\omega }}_{N}}θN=(ψNTψN)−1ψNTωN
θN+1=([ψN−ω(N−1)−ω(N)]T[ψN−ω(N−1)−ω(N)])−1[ψNT−ω(N−1)−ω(N)][ωNω(N+1)](4.6){{\mathbf{\theta }}_{\text{N+1}}}={{\left( {{\left[ \begin{matrix}
{{\mathbf{\psi }}_{N}} & \begin{matrix}
-\omega \left( N-1 \right) \\
-\omega \left( N \right) \\
\end{matrix} \\
\end{matrix} \right]}^{\text{T}}}\left[ \begin{matrix}
{{\mathbf{\psi }}_{N}} \\
\begin{matrix}
-\omega \left( N-1 \right) & -\omega \left( N \right) \\
\end{matrix} \\
\end{matrix} \right] \right)}^{-1}}\left[ \begin{matrix}
{{\mathbf{\psi }}_{N}}^{\text{T}} & \begin{matrix}
-\omega \left( N-1 \right) \\
-\omega \left( N \right) \\
\end{matrix} \\
\end{matrix} \right]\left[ \begin{matrix}
{{\mathbf{\omega }}_{N}} \\
\omega \left( N+1 \right) \\
\end{matrix} \right]\tag{4.6}θN+1=([ψN−ω(N−1)−ω(N)]T[ψN−ω(N−1)−ω(N)])−1[ψNT−ω(N−1)−ω(N)][ωNω(N+1)](4.6)
θN+1=(ψNTψN+φN+1φN+1T)−1(ψNTωN+φN+1ωN+1)(4.7){{\mathbf{\theta }}_{\text{N+1}}}={{\left( {{\mathbf{\psi }}_{N}}^{T}{{\mathbf{\psi }}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T} \right)}^{-1}}\left( {{\mathbf{\psi }}_{N}}^{T}{{\mathbf{\omega }}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}} \right)\tag{4.7}θN+1=(ψNTψN+φN+1φN+1T)−1(ψNTωN+φN+1ωN+1)(4.7)
令RN=ψNTψN{{\mathbf{R}}_{N}}={{\mathbf{\psi }}_{N}}^{T}{{\mathbf{\psi }}_{N}}RN=ψNTψN,z=ψNTωN\mathbf{z}={{\mathbf{\psi }}_{N}}^{T}{{\mathbf{\omega }}_{N}}z=ψNTωN,那么
θN=(RN)−1zN(4.8){{\mathbf{\theta }}_{\text{N}}}={{\left( {{\mathbf{R}}_{N}} \right)}^{-1}}{{\mathbf{z}}_{N}}\tag{4.8}θN=(RN)−1zN(4.8)
θN+1=(RN+1)−1zN+1(4.9){{\mathbf{\theta }}_{\text{N+1}}}={{\left( {{\mathbf{R}}_{N+1}} \right)}^{-1}}{{\mathbf{z}}_{N+1}}\tag{4.9}θN+1=(RN+1)−1zN+1(4.9)
即
θN+1=(RN+φN+1φN+1T)−1(zN+φN+1ωN+1)(4.10){{\mathbf{\theta }}_{\text{N+1}}}={{\left( {{\mathbf{R}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T} \right)}^{-1}}\left( {{\mathbf{z}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}} \right)\tag{4.10}θN+1=(RN+φN+1φN+1T)−1(zN+φN+1ωN+1)(4.10)
还可以引入遗忘因子λ\lambdaλ,得
θN+1=(λRN+φN+1φN+1T)−1(λzN+φN+1ωN+1)(4.11){{\mathbf{\theta }}_{\text{N+1}}}={{\left( \lambda {{\mathbf{R}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T} \right)}^{-1}}\left( \lambda {{\mathbf{z}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}} \right)\tag{4.11}θN+1=(λRN+φN+1φN+1T)−1(λzN+φN+1ωN+1)(4.11)
RN+1=λRN+φN+1φN+1T(4.12){{\mathbf{R}}_{N+1}}=\lambda {{\mathbf{R}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}\tag{4.12}RN+1=λRN+φN+1φN+1T(4.12)
zN+1=(λzN+φN+1ωN+1)(4.13){{\mathbf{z}}_{\text{N+1}}}=\left( \lambda {{\mathbf{z}}_{N}}+{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}} \right)\tag{4.13}zN+1=(λzN+φN+1ωN+1)(4.13)
对于本模型而已,到这一步就可以结束了。但是,对于高阶的AR方程,或者说多变量RLS,方程中的逆是比较耗时的(没具体算过,大家都这么说),需要进一步优化。
有这样一个定理,如果方阵AAA能拆分成如下形式
A=B−1+CD−1CTA={{B}^{-1}}+C{{D}^{-1}}{{C}^{T}}A=B−1+CD−1CT
有
A−1=B−BC(D+CTBC)−1CTB{{A}^{-1}}=B-BC{{\left( D+{{C}^{T}}BC \right)}^{-1}}{{C}^{T}}BA−1=B−BC(D+CTBC)−1CTB
据此,将式(4.13)改写成
RN+1=((λRN)−1)−1+φN+11φN+1T{{\mathbf{R}}_{N+1}}={{\left( {{\left( \lambda {{\mathbf{R}}_{N}} \right)}^{-1}} \right)}^{-1}}+{{\mathbf{\varphi }}_{\text{N+}1}}1{{\mathbf{\varphi }}_{\text{N+}1}}^{T}RN+1=((λRN)−1)−1+φN+11φN+1T
可得
RN+1−1=(λRN)−1−(λRN)−1φN+1(1+φN+1T(λRN)−1φN+1)−1φN+1T(λRN)−1(4.14){{\mathbf{R}}_{N+1}}^{-1}={{\left( \lambda {{\mathbf{R}}_{N}} \right)}^{-1}}-{{\left( \lambda {{\mathbf{R}}_{N}} \right)}^{-1}}{{\mathbf{\varphi }}_{\text{N+}1}}{{\left( 1+{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\left( \lambda {{\mathbf{R}}_{N}} \right)}^{-1}}{{\mathbf{\varphi }}_{\text{N+}1}} \right)}^{-1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\left( \lambda {{\mathbf{R}}_{N}} \right)}^{-1}}\tag{4.14}RN+1−1=(λRN)−1−(λRN)−1φN+1(1+φN+1T(λRN)−1φN+1)−1φN+1T(λRN)−1(4.14)
RN+1−1=1λ(RN−1−RN−1φN+1φN+1TRN−1λ+φN+1TRN−1φN+1)(4.15){{\mathbf{R}}_{N+1}}^{-1}=\frac{1}{\lambda }\left( {{\mathbf{R}}_{N}}^{-1}-\frac{{{\mathbf{R}}_{N}}^{-1}{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{R}}_{N}}^{-1}}{\lambda +{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{R}}_{N}}^{-1}{{\mathbf{\varphi }}_{\text{N+}1}}} \right)\tag{4.15}RN+1−1=λ1(RN−1−λ+φN+1TRN−1φN+1RN−1φN+1φN+1TRN−1)(4.15)
令P=R−1\mathbf{P}={{\mathbf{R}}^{-1}}P=R−1,式(4.15)改写成
PN+1=1λ(PN−PNφN+1φN+1TPNλ+φN+1TPNφN+1)(4.16){{\mathbf{P}}_{N+1}}=\frac{1}{\lambda }\left( {{\mathbf{P}}_{N}}-\frac{{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}}{\lambda +{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}} \right)\tag{4.16}PN+1=λ1(PN−λ+φN+1TPNφN+1PNφN+1φN+1TPN)(4.16)
式(4.9)就可以改写成
θN+1=PN+1zN+1(4.17){{\mathbf{\theta }}_{\text{N+1}}}={{\mathbf{P}}_{N+1}}{{\mathbf{z}}_{N+1}}\tag{4.17}θN+1=PN+1zN+1(4.17)
到此,似乎可以画上句号了,但是好事者要将游戏进一步玩下去。令
K=PNφN+1λ+φN+1TPNφN+1\mathbf{K}=\frac{{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}}{\lambda +{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}}K=λ+φN+1TPNφN+1PNφN+1,并且发现K=PN+1φN+1\mathbf{K}={{\mathbf{P}}_{N+1}}{{\mathbf{\varphi }}_{\text{N+}1}}K=PN+1φN+1,那么式(4.16)可以改写成
PN+1=1λ(PN−KφN+1TPN)(4.19){{\mathbf{P}}_{N+1}}=\frac{1}{\lambda }\left( {{\mathbf{P}}_{N}}-\mathbf{K}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}} \right)\tag{4.19}PN+1=λ1(PN−KφN+1TPN)(4.19)
式(4.17)可以展开成
θN+1=λPN+1zN+PN+1φN+1ωN+1(4.19){{\mathbf{\theta }}_{\text{N+1}}}=\lambda {{\mathbf{P}}_{N+1}}{{\mathbf{z}}_{N}}+{{\mathbf{P}}_{N+1}}{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}}\tag{4.19}θN+1=λPN+1zN+PN+1φN+1ωN+1(4.19)
将式(4.16)代入式(4.17),得
θN+1=PNzN−kφN+1TPNzN+PN+1φN+1ωN+1(4.20){{\mathbf{\theta }}_{\text{N+1}}}={{\mathbf{P}}_{N}}{{\mathbf{z}}_{N}}-\mathbf{k}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}{{\mathbf{z}}_{N}}+{{\mathbf{P}}_{N+1}}{{\mathbf{\varphi }}_{\text{N+}1}}{{\omega }_{\text{N+}1}}\tag{4.20}θN+1=PNzN−kφN+1TPNzN+PN+1φN+1ωN+1(4.20)
θN+1=θN−kφN+1TθN+kωN+1(4.21){{\mathbf{\theta }}_{\text{N+1}}}={{\mathbf{\theta }}_{N}}-\mathbf{k}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{\theta }}_{N}}+\mathbf{k}{{\omega }_{\text{N+}1}}\tag{4.21}θN+1=θN−kφN+1TθN+kωN+1(4.21)
θN+1=θN+k(ωN+1−φN+1TθN)(4.21){{\mathbf{\theta }}_{\text{N+1}}}={{\mathbf{\theta }}_{N}}+\mathbf{k}\left( {{\omega }_{\text{N+}1}}-{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{\theta }}_{N}} \right)\tag{4.21}θN+1=θN+k(ωN+1−φN+1TθN)(4.21)
最终可得
{PN+1=1λ(PN−PNφN+1φN+1TPNλ+φN+1TPNφN+1)K=PN+1φN+1θN+1=θN+k(ωN+1−φN+1TθN)\left\{ \begin{matrix}
{{\mathbf{P}}_{N+1}}=\frac{1}{\lambda }\left( {{\mathbf{P}}_{N}}-\frac{{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}}{\lambda +{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{P}}_{N}}{{\mathbf{\varphi }}_{\text{N+}1}}} \right) \\
\mathbf{K}={{\mathbf{P}}_{N+1}}{{\mathbf{\varphi }}_{\text{N+}1}} \\
{{\mathbf{\theta }}_{\text{N+1}}}={{\mathbf{\theta }}_{N}}+\mathbf{k}\left( {{\omega }_{\text{N+}1}}-{{\mathbf{\varphi }}_{\text{N+}1}}^{T}{{\mathbf{\theta }}_{N}} \right) \\
\end{matrix} \right.⎩⎨⎧PN+1=λ1(PN−λ+φN+1TPNφN+1PNφN+1φN+1TPN)K=PN+1φN+1θN+1=θN+k(ωN+1−φN+1TθN)
第一次看到这个式子,是在一位貌似清华博士的matlab代码里,他出算法,我干移植。问一下公式含义,只收到认真学习XXX的无聊回复——够拽,即使他的产出可用莫名其妙来形容,但是,好拽!
五 拉氏变换
式(3.1)所描述的是一个AR2模型,这是时间序列分析领域的术语,而在电子信息领域,则称之为IIR。它常常与拉氏变换交织在一起。
拉式变换,到底是什么意思,我以前不知道,现在依旧不知道。它的提出者,拉普拉斯先生,把它当成一个解微分方程的技巧(在那个年代,类似的技巧太多了),拉氏本人,一开始也不知道它的含义,直到傅里叶变换的提出,拉氏明白了,这是个复频率的问题。但我仍旧不明白,只是有些微不足道的看法,在这里念叨念叨。
拉氏变换,给出了描述一个系统的可视化的几何方法,其重点在于零极点的理解。
一般的传递函数,对分子分母做因式分解,可写作如下形式,面对这样的一个形式,学过复分析读者自然会想到,这是定义了一个复平面上的向量场,工科生所谓的频谱只是这个向量场在虚数轴上的一个切片。
H(s)=K∏m=1M(s−Zm)∏n=1N(s−Zn) H\left( s \right)=K\frac{\prod\limits_{m=1}^{M}{\left( s-{{Z}_{m}} \right)}}{\prod\limits_{n=1}^{N}{\left( s-{{Z}_{n}} \right)}}H(s)=Kn=1∏N(s−Zn)m=1∏M(s−Zm)
让我们举例几个简单的例子。
5.1 极点
如图,是一个RC低通滤波器的幅频特性曲线和相频率特性曲线。
图5.1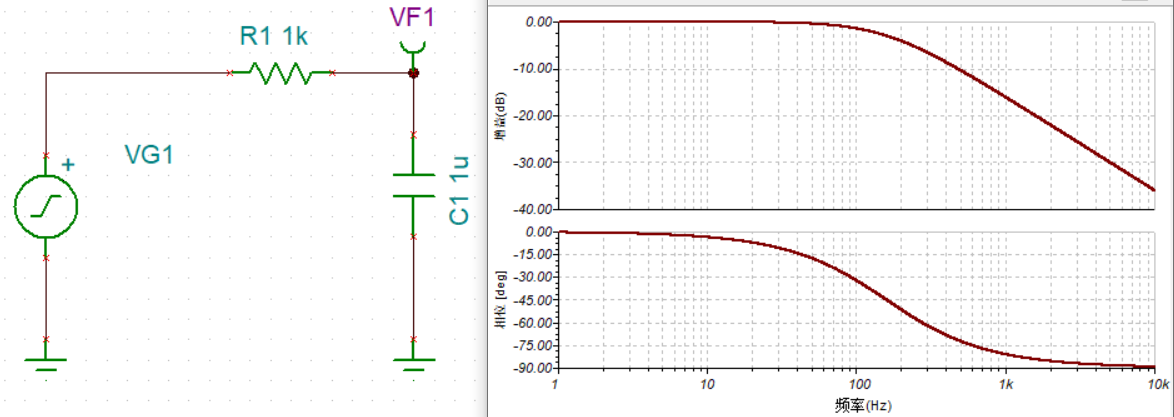
让我们到从二维平面向量场的角度来看看两条曲线是如何来的。 写出传递函数
H(s)=1RCs+1(5.1)\text{H}\left( \text{s} \right)=\frac{1}{\text{RCs+1}}\tag{5.1}H(s)=RCs+11(5.1)
即
H(s)=1RC⋅1s+1RC\text{H}\left( \text{s} \right)=\frac{1}{RC}\centerdot \frac{1}{\text{s+}\frac{\text{1}}{RC}}H(s)=RC1⋅s+RC11
H(s)=k1s-s1(5.2)\text{H}\left( \text{s} \right)=k\frac{1}{\text{s-}{{\text{s}}_{\text{1}}}}\tag{5.2}H(s)=ks-s11(5.2)
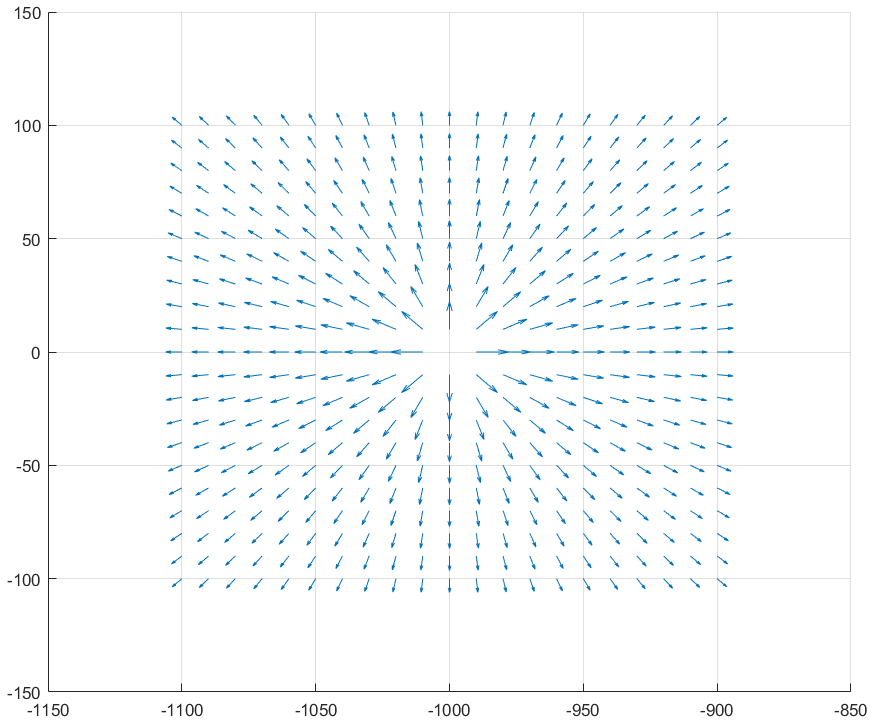
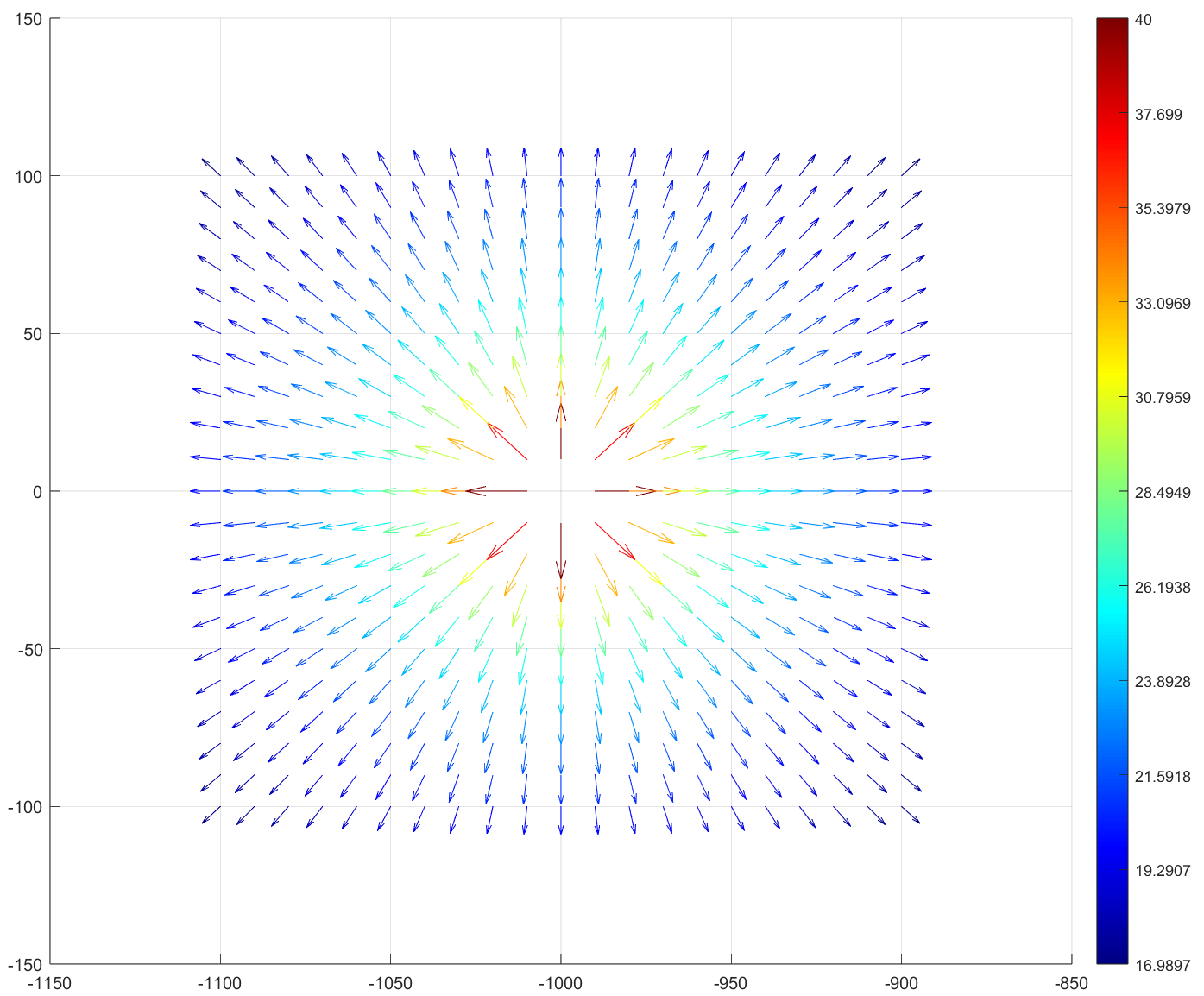
存在一个极点 s1=-1RC=−1000{{\text{s}}_{1}}\text{=-}\frac{\text{1}}{RC}=-1000s1=-RC1=−1000,看一下极点附近的场——请仔细看脚本,绘制的是波利亚向量场。
R = 1000; %1K
C = 10^(-6); %1uF
Z1 = -1/(R*C) %极点
[X,Y] = meshgrid( -1100:10:-900 , -100:10:100 );
Z = X + 1i*Y;
H = 1./((R*C)*Z+1); %生成向量场
H_db = 20*log10(abs(H)); %转为分贝值
m = abs(H)./H_db; %
H_polya = conj(H)./m; %修改为波利亚向量场
H_db_r = real(H_polya); %取实部
H_db_i = imag(H_polya); %取虚部
figure(); hold on;
quiver(X,Y,H_db_r,H_db_i);
grid on;
图5.2
上个色看看。
接下来看一下沿着虚数轴上的向量。
R = 1000; %1K
C = 10^(-6); %1uF
Z1 = -1/(R*C) %极点
[X,Y] = meshgrid( 0 , -10000:500:10000 );
Z = X + 1i*Y;
H = 1./((R*C)*Z+1); %生成向量场
H_polya = conj(H); %修改为波利亚向量场
H_r = real(H_polya); %取实部
H_i = imag(H_polya); %取虚部
figure(); hold on;
quiver(X,Y,H_r,H_i);
grid on;
图5.3

提取幅频特性曲线和相频特性曲线,请注意看脚本,没有使用波利亚向量场。
R = 1000; %1K
C = 10^(-6); %1uF
Z1 = -1/(R*C) %极点
[X,Y] = meshgrid( 0 , 0:1:10000 );
Z = X + 1i*Y*2*pi;
H = 1./((R*C)*Z+1); %生成向量场
H_db = 20*log10(abs(H)); %转为分贝值
H_angle = angle( H );
figure();
subplot(2,1,1);
semilogx ( Y, H_db );
grid on
subplot(2,1,2);
semilogx(Y,H_angle*180/pi);
grid on
图5.4

看式(5.2)和图5.2可知,极点产生的的向量场,是1s\frac{1}{\text{s}}s1的向量场平移到s1{{\text{s}}_{\text{1}}}s1处得到。
图5.2的极点是一个源,从源中射出的箭头就像一个流体,在二维平直空间上,这种流体遵循守恒律,即对任意的内部包含一个极点的闭合曲线CCC,沿着CCC积分结果是2πi2\pi i2πi。
向量场中,距离极点越近的点sss,受到的影响越大,该点的流体密度越大,即模长越长,并且满足反比率1r\frac{1}{r}r1,方向是背离极点,这方向可用和实数轴的夹角θ\thetaθ来表示,“−θ-\theta−θ”(或者说原来的场——而非波利亚向量场——在sss的形成的角度)就是相频曲线中的相位。
一个有意思的是,这种反比率1r\frac{1}{r}r1和三维平直空间的平方反比率1r2\frac{1}{{{r}^{2}}}r21实际上是能量守恒的体现,在其他维度的空间中也有各自的表现形式,比如一维空间,就是等比率111,高斯定理是表述这种守恒率的数学工具。这种现象在引力学、电动力学、热力学、复分析、偏微分方程等科目被不同地表述。我们这些研究车振的,大体上属于声学的范畴,声学上有一个认识,距离每拉长一倍,功率下降6db,这实际上就是这种守恒律展现出的一个现象。想象一个点声源,声能量从源向外传播,能量可以形象地想象成一种流体,学术点叫通量(能量也好,质量也罢,我常常把它们统一想象成流体,这样一来就可以从统一的角度来看待诸如能量守恒、质量守恒等问题。这种看法其实很古老,西方的前辈曾经把热能认为是一种物质,即热质,为此聚讼纷纭)。用两个闭合曲面s1{{s}_{1}}s1、s2{{s}_{2}}s2去包裹源,在稳态的情况下,流经s1{{s}_{1}}s1、s2{{s}_{2}}s2的通量(流体)ϕ1{{\phi }_{1}}ϕ1、ϕ2{{\phi }_{2}}ϕ2是相等的。不妨把曲面简化成球面s1{{s}_{1}}s1、s2{{s}_{2}}s2,半径分别是r1{{r}_{1}}r1、r2{{r}_{2}}r2,分别取球面上两个点周围的一小块面积为δ1{{\delta }_{1}}δ1、δ2{{\delta }_{2}}δ2的曲面,δ{\delta}δ在球面面积中的占比自然分别是δ14πr12\frac{{{\delta }_{1}}}{4\pi {{r}_{1}}^{2}}4πr12δ1、δ24πr22\frac{{{\delta }_{2}}}{4\pi {{r}_{2}}^{2}}4πr22δ2,各自通量是δ1ϕ4πr12\frac{{{\delta }_{1}}\phi }{4\pi {{r}_{1}}^{2}}4πr12δ1ϕ、δ2ϕ4πr22\frac{{{\delta }_{2}}\phi }{4\pi {{r}_{2}}^{2}}4πr22δ2ϕ,通量密度就是ϕ4πr12\frac{\phi }{4\pi {{r}_{1}}^{2}}4πr12ϕ、ϕ4πr12\frac{\phi }{4\pi {{r}_{1}}^{2}}4πr12ϕ。我喜欢把平方反比率写成14πr2\frac{1}{4\pi {{r}^{2}}}4πr21,从这些公式里读者们应该能明白。于是乎两球面上的点的功率之差就是10log10θ4πr12−10log10θ4πr2210{{\log }_{10}}\frac{\theta }{4\pi {{r}_{1}}^{2}}-10{{\log }_{10}}\frac{\theta }{4\pi {{r}_{2}}^{2}}10log104πr12θ−10log104πr22θ,即20log10r2r120{{\log }_{10}}\frac{{{r}_{2}}}{{{r}_{1}}}20log10r1r2,当r2=2r1{{r}_{2}}=2{{r}_{1}}r2=2r1,得20log10r2r1≈6db20{{\log }_{10}}\frac{{{r}_{2}}}{{{r}_{1}}}\approx 6db20log10r1r2≈6db。这些当然是题外话了,只是辅助我们对极点的认识,敲代码用不上,买菜也用不上。
回到二维的复平面中,或许读者会有疑问,对解析的复函数H(s)H\left( s \right)H(s)的积分为什么会看成是其波利亚向量场上的积分?这个只能说是计算的结果。令s=x+iys=x+iys=x+iy,H(s)=u+ivH\left( s \right)=u+ivH(s)=u+iv,沿着复平面上的曲线γ\gammaγ对H(s)H\left( s \right)H(s)积分
∫γH(s)ds=∫γ(u+iv)d(x+iy)=∫γ(udx−vdy)+i∫γ(vdx+udy)\int_{\gamma }{H\left( s \right)ds=}\int_{\gamma }{\left( u+iv \right)d\left( x+iy \right)}=\int_{\gamma }{\left( udx-vdy \right)}+i\int_{\gamma }{\left( vdx+udy \right)}∫γH(s)ds=∫γ(u+iv)d(x+iy)=∫γ(udx−vdy)+i∫γ(vdx+udy)
上式右侧第一项∫γ(udx−vdy)=∫γ(udx+(−v)dy)\int_{\gamma }{\left( udx-vdy \right)}=\int_{\gamma }{\left( udx+\left( -v \right)dy \right)}∫γ(udx−vdy)=∫γ(udx+(−v)dy),是H(s)‾=u+i(−v)\overline{H\left( s \right)}=u+i\left( -v \right)H(s)=u+i(−v)生成的向量场沿γ\gammaγ的环量Γ\GammaΓ,是内积γ→⋅H(s)‾\overrightarrow{\gamma }\centerdot \overline{H\left( s \right)}γ⋅H(s),在物理课上,它常常别表述为功;第二项∫γ(vdx+udy)=∫γ(−(−v)dx+udy)\int_{\gamma }{\left( vdx+udy \right)}=\int_{\gamma }{\left( -\left( -v \right)dx+udy \right)}∫γ(vdx+udy)=∫γ(−(−v)dx+udy)是H(s)‾\overline{H\left( s \right)}H(s)生成的向量场沿γ\gammaγ的通量Φ\PhiΦ,是外积γ→∧H(s)‾\overrightarrow{\gamma }\wedge \overline{H\left( s \right)}γ∧H(s);而积分就变成了几何积γ→H(s)‾\overrightarrow{\gamma }\overline{H\left( s \right)}γH(s)。在这里,微积分、几何、物理完美地对应起来了。
柯西积分公式是解闭合曲线的好工具。对图5.2中的极点s1{{s}_{1}}s1,用任意的闭合曲线CCC去包围极点,沿着CCC积分∫C1s-s1dz=2πi\int_{C}{\frac{1}{\text{s-}{{\text{s}}_{\text{1}}}}dz=}2\pi i∫Cs-s11dz=2πi,不管CCC如何变化,Γ\GammaΓ始终是0而Φ\PhiΦ始终是2π2\pi2π,在物理世界中就是守恒率的体现。
5.2 零点
写出RC高通电路的传递函数,函数中存在一个极点s0=0{{s}_{0}}=0s0=0,在此我们只谈论零点,不讨论极点。
H(s)=RCsRCs+1(5.3)\text{H}\left( \text{s} \right)=\frac{\text{RCs}}{\text{RCs+1}}\tag{5.3}H(s)=RCs+1RCs(5.3)
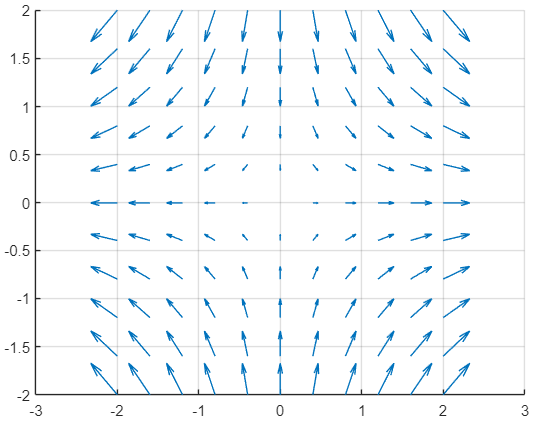
画出零点附近的向量场
R = 1000; %1K
C = 10^(-6); %1uF
[X,Y] = meshgrid( -2:0.4:2 , -2:0.4:2 );
Z = X + 1i*Y;
H = ((R*C)*Z); %生成向量场
H_r = real(H); %取实部
H_i = imag(H); %取虚部
figure(); hold on;
quiver(X,Y,H_r,H_i);
grid on;
图5.5

零点“s−s0s-{{s}_{0}}s−s0”生成的向量场,可以看成是“sss”的向量场平移到s0{s}_{0}s0处。
零点生成的场,可以比作弹簧,遵循胡克定律,即距离零点越近,受到的影响越小,满足正比率,方向是背离零点。反之,离得越远,影响越大,越是不稳,这也是连续系统中找不到全零点电路的原因。
零点的波利亚向量场也很有趣,如下图。
图5.6
从图中也可以验证在复分析或者多元微积分中学到的知识,即解析函数H(s)=s−s0H\left( s \right)=s-{{s}_{0}}H(s)=s−s0生成的向量场上沿闭合曲线的积分为0。读者不妨在图上任意地方画几个圈圈,看看Γ\GammaΓ如何变化,Φ\PhiΦ如何变化。从数学上证明这一点,只需要用到格林公式和柯西-黎曼方程。

















 1190
1190

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









