






 本文深入探讨了二叉搜索树的基本概念及其在数据查找中的优势,随后介绍了平衡二叉树的原理,包括AVL树的定义、平衡因子的概念及失衡调整策略,如旋转操作,以维持树的平衡状态。
本文深入探讨了二叉搜索树的基本概念及其在数据查找中的优势,随后介绍了平衡二叉树的原理,包括AVL树的定义、平衡因子的概念及失衡调整策略,如旋转操作,以维持树的平衡状态。
一:二叉搜索树
平衡二叉树是在二叉排序树的基础上发展而来的,那为什么要引入二叉搜索树呢?
所谓二叉搜索树(Binary Search Tree),又叫二叉排序树,简单而言就是左子树上所有节点的值均小于根节点的值,而右子树上所有结点的值均大于根节点的值,左小右大,并不是乱序,因此得名二叉排序树。
一个新事物不能凭空产生,那二叉搜索树又有什么用呢?
有了二叉搜索树,当你要查找一个值,就不需要遍历整个序列或者说遍历整棵树了,可以根据当前遍历到的结点的值来确定搜索方向,这就好比你要去日本,假设你没有见过世界地图,你不知道该往哪个方向走,只能满地球找一遍才能保证一定能够到达日本;而如果你见过世界地图,你知道日本在中国的东边,你就不会往西走、往南走、往北走。这种思维在搜索中被叫做“剪枝”,把不必要的分枝剪掉可以提高搜索效率。在二叉搜索树中查找值,每次都会把搜索范围缩小,与二分搜索的思维类似。
定义:二叉搜索树又称二叉查找树,亦称为二叉排序树。
每棵子树头节点的值都比各自左子树上所有节点值要大,也都比各自右子树上所有节点值要小。
二叉查找树的中序遍历序列一定是从小到大排列的。

左图是二叉查找树,右图不是
查找性能
当数据数目为N,树高度保持logN附近。则平均查找长度与logN成正比,查找平均时间复杂度为O(logN)。 当先后插入的关键字有序时,二叉搜索树退化成单支树结构。此时树高N。平均查找长度为(N+1)/2,查找的平均时间复杂度为O(N)。
插入性能
插入效率与查找效率一致。
删除性能
删除节点时,若节点为叶子节点,或者节点只有单一子树,则时间复杂度为O(1)。若节点既有左子树又有右子树,则需要执行递归过程,对应时间复杂度为O(logN)。
二:平衡(二叉)搜索树
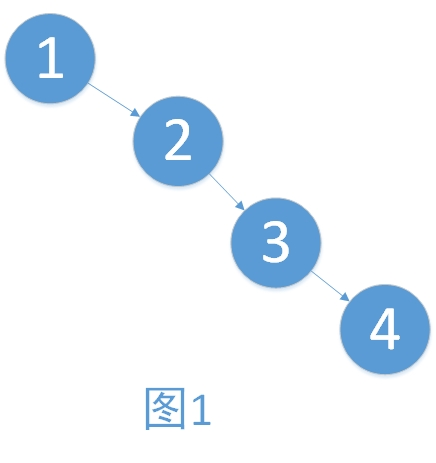
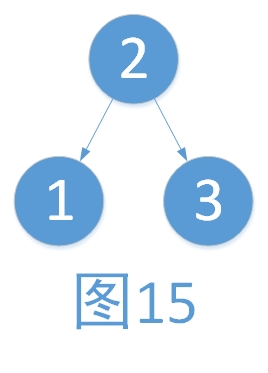
学习过了二叉查找树,想必大家有遇到一个问题。例如,将一个数组{1,2,3,4}依次插入树的时候,形成了图1的情况。有建立树与没建立树对于数据的增删查改已经没有了任何帮助,反而增添了维护的成本。而只有建立的树如图2,才能够最大地体现二叉树的优点。
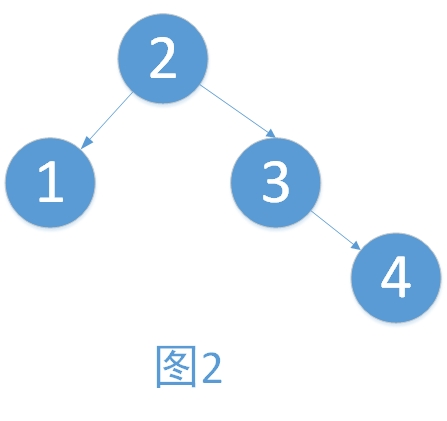
在上述的例子中,图2就是一棵平衡二叉树。科学家们提出平衡二叉树,就是为了让树的查找性能得到最大的体现。
定义:
平衡二叉查找树:简称平衡二叉树。由前苏联的数学家Adelse-Velskil和Landis在1962年提出的高度平衡的二叉树,根据科学家的英文名也称为AVL树。它具有如下几个性质:
- 可以是空树。
- 假如不是空树,任何一个结点的左子树与右子树都是平衡二叉树,并且高度之差的绝对值不超过1
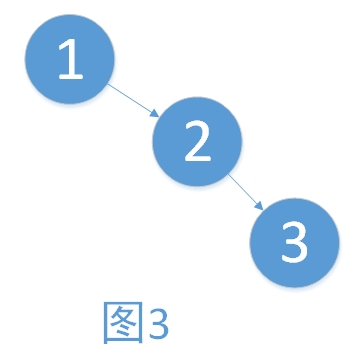
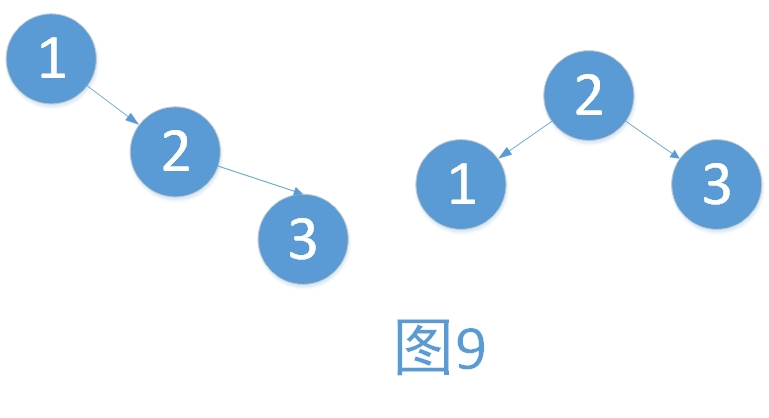
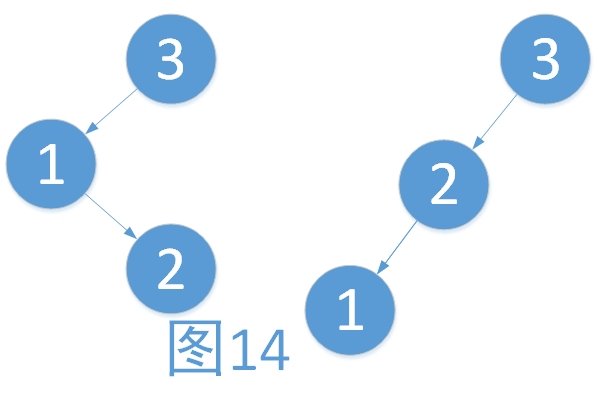
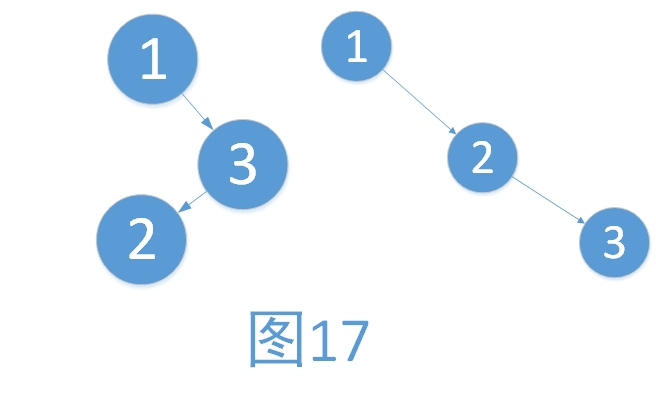
平衡之意,如天平,即两边的分量大约相同。如定义,假如一棵树的左右子树的高度之差超过1,如左子树的树高为2,右子树的树高为0,子树树高差的绝对值为2就打破了这个平衡。如依次插入1,2,3三个结点(如下图)后,根结点的右子树树高减去左子树树高为2,树就失去了平衡。
平衡因子:左子树的高度减去右子树的高度。由平衡二叉树的定义可知,平衡因子的取值只可能为0,1,-1.分别对应着左右子树等高,左子树比较高,右子树比较高。
平衡二叉树插入时的失衡与调整:平衡二叉树的失衡调整主要是通过旋转最小失衡子树来实现的。
(1)最小失衡子树:在新插入的结点向上查找,以第一个平衡因子的绝对值超过1的结点为根的子树称为最小不平衡子树。也就是说,一棵失衡的树,是有可能有多棵子树同时失衡的,如下。而这个时候,我们只要调整最小的不平衡子树,就能够将不平衡的树调整为平衡的树。
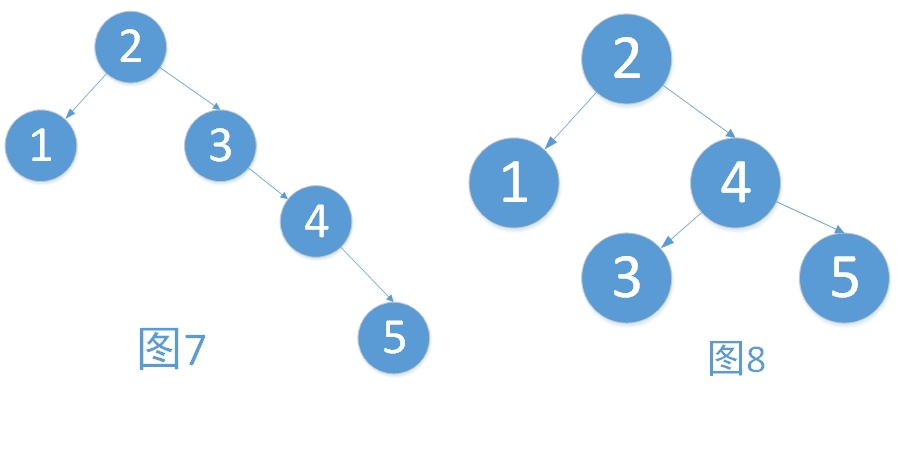
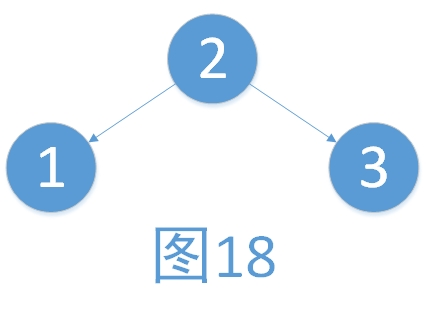
在图7中。2结点(左子树树高-右子树树高)的绝对值=2。同理,3结点的平衡因子也为2.此时同时存在了两棵不平衡子树,而以3为根的树是最小的不平衡子树。我们只要将其以3为中心,将最小不平衡树向左旋转,即可得到平衡二叉树,如图8。
下面我们先用两个简单的例子来感受一下调整的方法。
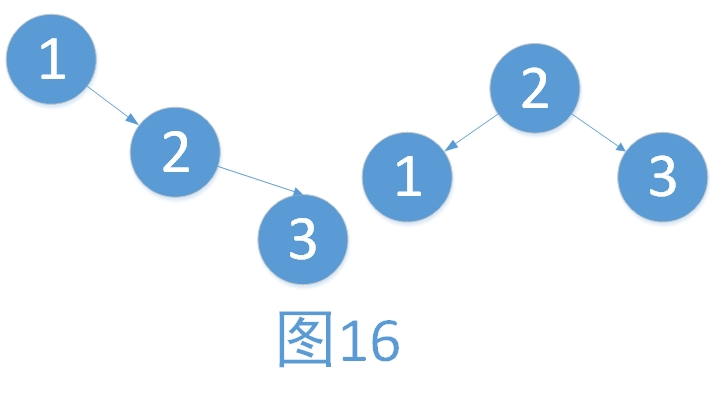
例1:右子树过高,向左旋转。步骤如下
- 将2作为根结点
- 将1作为2的左孩子
- 将2的左孩子作为1的右孩子(维护树的有序性,只是此处为NULL而已)
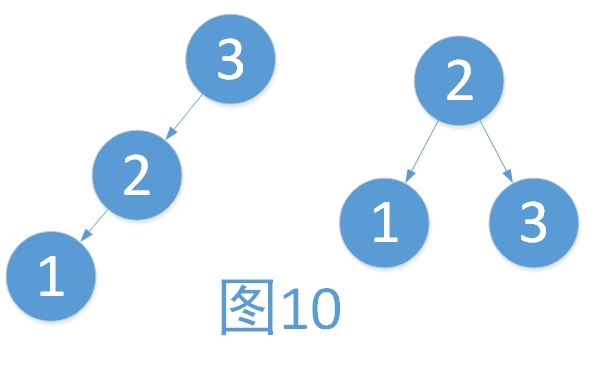
例2:左子树过高,向右旋转。步骤如下
- 将2作为根结点
- 将3作为2的右孩子
- i将2的右孩子作为3的左孩子(维护树的有序性,只是此处为NULL而已)
下面我们再来看一个通过旋转,但是没办法达到平衡的失败例子。
例3:右子树过高,向左旋转。步骤如下
- 将3作为根结点
- 将3的左孩子作为1的右孩子
- 将1作为3的左孩子
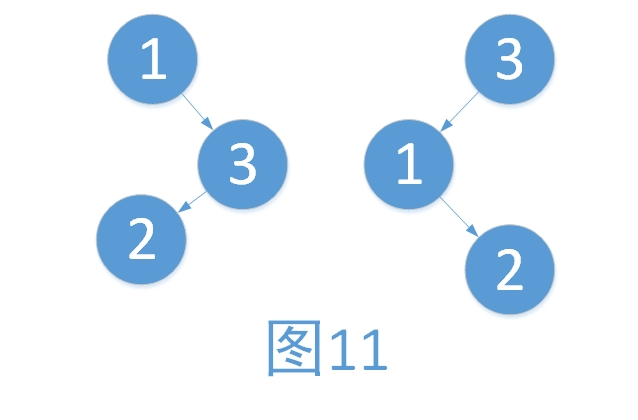
如上,我们发现,旋转之后树并没有恢复平衡。对比图9,我们发现,根的右子树不一致。
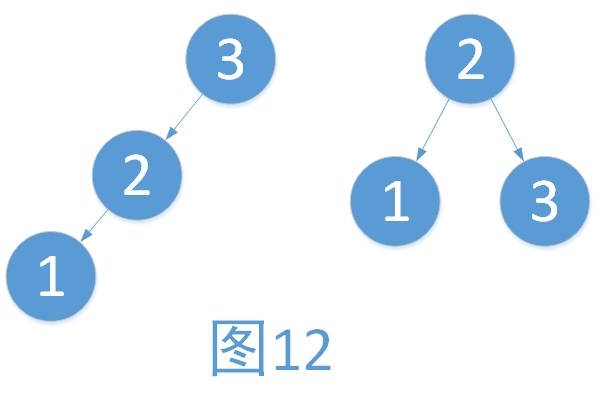
在上面的三个例子我们可以看出,我们对不平衡的树进行旋转的时候,不仅需要考虑需要最小失衡子树的根结点的平衡因子,还要考虑根结点较高子树的根结点的平衡因子。如图9与图11中,较高子树都为右子树,右子树不同,旋转后有着完全不同的结果。
为了方便讨论,我们使用连续的两个字母来表示平衡因子,以表示各种不同的情况。第一个字母表示最小不平衡子树根结点的平衡因子,第二个字母表示最小不平衡子树较高子树的根结点的平衡因子。使用L表示左子树较高,R表示右子树较高,E表示左右子树等高。如上述图11,根为的平衡因子L,较高子树的根为L,我们将这种情况表示为LL型,再如上述例子3,根为R,较高子树的根为L我们将这种情况称为RL型。
下面我们将对所有的失衡情况进行讨论。大致分为两大类,一左子树过高,二右子树过高。顺带提一下记忆的方法,读者对于具体某一种类型只要记住最后哪一个结点作为根即可,也就是下面标红色的部分。
二、失衡与处理详解
1. 左子树过高
a) LL型
在LL型的不平衡树中,我们首先找到最小不平衡子树,再以其根结点向右旋转。为何是向右旋转呢?应该不难理解,向右旋转后,相当于右边的子树树高增加了1,而左边的子树树高降低了1,而原本的树高之差为2,那么就能够将根的平衡因子就化为0.引用一下之前的图如下。旋转之后为“原来根结点的左孩子作为新的根结点”。
我们对树以根结点为中心,向右旋转。旋转步骤如下
- 将2作为根结点
- 将3作为2的右孩子
- 将2的右孩子作为3的左孩子(维护树的有序性,只是此处为NULL而已
b) LE型
在这里需要说明的是,插入的时候,是不会出现LE的这种情况的。只有在删除的时候才会出现。下面对于为何插入不可能出现做一些个人见解。
我们不妨假设存在LE的这种情况。如下。
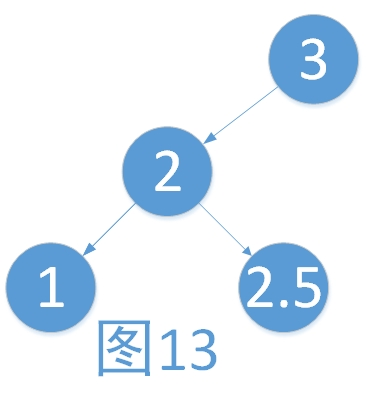
假设我们刚插入的元素是1,那么原来的树已经不是平衡树。不可能。
假设我们刚插入的元素是2.5,那么原来的树也不是平衡树,也不可能。所以说在插入的时候,是不会出现LE的这种情况的。而具体什么时候会出现呢,我们在删除的章节进行讲解。同理,不可能出现RE的情况,下面也不进行讨论。读者可以使用反证法自行验证。
c) LR型
对于LR,要分为两步进行旋。旋转之后为“原来根结点的左孩子的右孩子作为新的根结点”。
第一以较高子树的根,即1,为中心向左旋转。具体步骤如下。
- 将2的左子树作为1的右子树(维护树的有序性,只是此处为NULL而已)
- 将1作为2的左子树
- 将2作为3的左子树
第二以原树的根,即3为中心,向右旋转。最后结果如下
2. 右子树过高
a) RR型
还是引用一下之前的例子。旋转的步骤如下。旋转之后为“原来根结点的右孩子作为新的根结点”。
i. 将2作为根结点
ii. 将1作为2的左孩子
iii. 将2的左孩子作为1的右孩子(维护树的有序性,只是此处为NULL而已)
最后1,2,3的平衡因子都为EH。
b)RL型
还是引用一下之前的例子。与LR型类似,我们需要进行两次旋转。旋转之后为“原来根结点的右孩子的左孩子作为新的根结点”。
第一,以根结点的右孩子即3为中心向右旋转,结果如下。具体步骤如下
i. 将2作为1的右孩子
ii. 将3作为2的右孩子
iii. 将2的右孩子作为3的左孩子(维护树的有序性,只是此处为NULL而已)
第二,以原根结点即1,作为中心,向左旋转。结果如下。具体步骤如下
i. 将2作为根结点
ii. 将1作为2的左孩子
iii. 将2的左孩子作为1的右孩子(维护树的有序性,只是此处为NULL而已)
3、 插入时失衡与调整的总结
- 在所有的不平衡情况中,都是按照“寻找最小不平衡树”->“寻找所属的不平衡类别”->“根据4种类别进行固定化程序的操作”。
- LL,LR,RR,RL其实已经为我们提供了最后哪个结点作为新的根指明了方向。如LR型最后的根结点为原来的根的左孩子的右孩子,RL型最后的根结点为原来的根的右孩子的左孩子。我们只要记住这四种情况,可以很快地推导出所有的情况。
- 维护平衡二叉树,最麻烦的地方在于平衡因子的维护。想要熟悉这个过程,建议读者多多画图,在感官上首先体验这个过程。

















 36万+
36万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









