



 智能指针auto_ptr是C++中用于管理动态内存的一种手段,旨在防止内存泄漏和错误的内存释放。当auto_ptr对象析构时,会自动删除其所指向的对象,确保内存得到正确释放。然而,由于所有权的唯一性,当auto_ptr对象被赋值给另一个auto_ptr时,原始对象会失去所有权,其指针将失效。这种设计虽然有助于内存管理,但也存在所有权转移导致旧智能指针提前失效的问题。
智能指针auto_ptr是C++中用于管理动态内存的一种手段,旨在防止内存泄漏和错误的内存释放。当auto_ptr对象析构时,会自动删除其所指向的对象,确保内存得到正确释放。然而,由于所有权的唯一性,当auto_ptr对象被赋值给另一个auto_ptr时,原始对象会失去所有权,其指针将失效。这种设计虽然有助于内存管理,但也存在所有权转移导致旧智能指针提前失效的问题。
动态内存的使用很容易出现问题,因为确保在正确的时间释放内存是极其困难的。有时我们会忘记释放内存,在这种情况下就会产生内存泄漏;有时这块内存上还有其他指针指向他,我们就释放了它,在这种情况下会产生引用非法内存的指针。
内存泄漏是指堆内存的泄漏。堆,就是那些由 new 分配的内存块。
栈上的内存管理方式:
系统自动开辟 系统自动销毁
堆上的内存管理方式:
用户手动开辟 用户手动销毁
智能指针结合栈和堆的特点:
用户手动开辟 系统自动销毁
对象的生成:
先开辟内存,再调用析构函数。
对象的销毁:
先调用析构函数,再释放内存。
把指针封装成对象,当智能指针对象生存周期到了,会自动调用析构函数。
再在析构函数中把指针所指向的内存释放掉。
动态内存的管理是通过一对运算符来完成的:
new:在动态内存中为对象分配空间并返回一个指向该对象的指针。
delete:接收一个动态对象的指针,销毁该对象,并释放与之关联的内部内存。
删除一个指针p(delete p;)实际意思是删除了p所指的目标(变量或对象等),释放了它所占的堆空间,而不是删除p本身(指针p本身并没有撤销,它自己仍然存在,该指针所占内存空间并未释放),释放堆空间后,p成了空指针。
因此智能指针的作用就是为了保证使用堆上对象的时候,对象一定会被释放,但只能释放一次,并且释放后指向该对象的指针应该马上归 0。
auto_ptr:指向一个动态分配的对象指针,它的析构函数用于删除所指对象的空间,以此达到对对象生存期的控制。
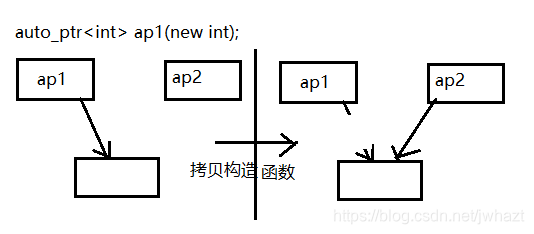
设计思想:auto_ptr智能指针所有权唯一,当旧的智能指针对象赋值给新智能指针对象时,取消旧的智能指针对象的所有权,新智能指针具有这块内存的所有权。所有权:能对这块内存进行操作。
缺点:所有权转移导致旧智能指针提前失效。
如图:ap1为旧智能指针,ap2为新智能指针。
代码如下:
#include <iostream>
using namespace std;
template<typename T>
class Auto_Ptr
{
public:
Auto_Ptr(T* ptr) :mptr(ptr){}
Auto_Ptr(const Auto_Ptr<T>& rhs) //拷贝构造函数
{
mptr = rhs.mptr;
rhs.Release();
}
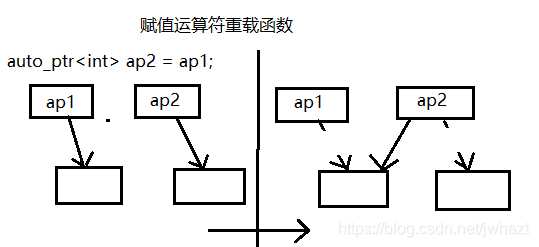
Auto_Ptr<T>& operator=(const Auto_Ptr<T>& rhs)//赋值运算符重载函数
{
if (this != &rhs)
{
delete mptr;//delete NULL;
mptr = rhs.mptr;
rhs.Release();
}
return *this;
}
~Auto_Ptr()
{
if (mptr != NULL)
{
delete mptr;
}
mptr = NULL;
}
T& operator*()
{
return *mptr;
}
T* operator->()
{
return mptr;
}
private:
void Release()const
{
(T*)mptr = NULL;
}
T* mptr;
};
int main()
{
Auto_Ptr<int> ap1 = new int;
Auto_Ptr<int> ap2 = ap1;
*ap1 = 20;
return 0;
}

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









