




 文章介绍了直流电机的工作原理,包括电能转换为机械能,电机的双向驱动,以及PWM(脉冲宽度调制)在调整电机速度中的应用。PWM通过调节脉冲的占空比来控制电机转速,同时讨论了电阻对电机驱动的影响。此外,文章还提到了步进电机,它是通过电脉冲信号转换为角位移,并给出了步进电机的控制示例,说明如何通过按键改变电机的旋转方向和速度。
文章介绍了直流电机的工作原理,包括电能转换为机械能,电机的双向驱动,以及PWM(脉冲宽度调制)在调整电机速度中的应用。PWM通过调节脉冲的占空比来控制电机转速,同时讨论了电阻对电机驱动的影响。此外,文章还提到了步进电机,它是通过电脉冲信号转换为角位移,并给出了步进电机的控制示例,说明如何通过按键改变电机的旋转方向和速度。
直流电机
电能转机械能。
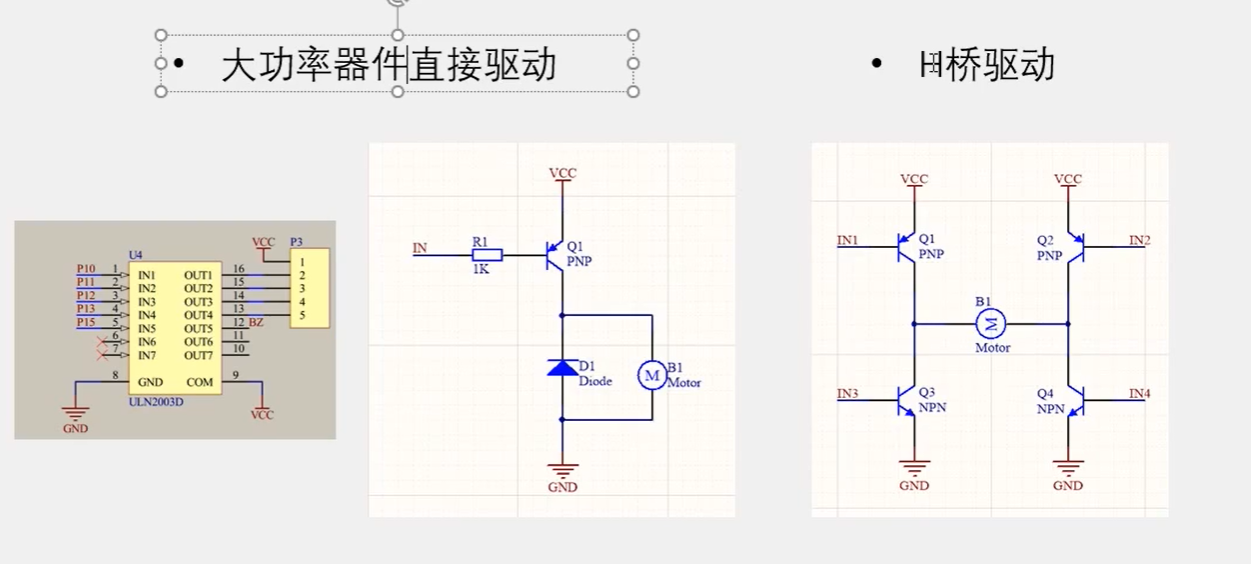
第二种驱动方式可以双向,电机可以双向驱动,转向不同。
直接驱动电机还起到电感的作用,断开电源后电机产生电压,可以形成一个回路慢慢消耗掉。
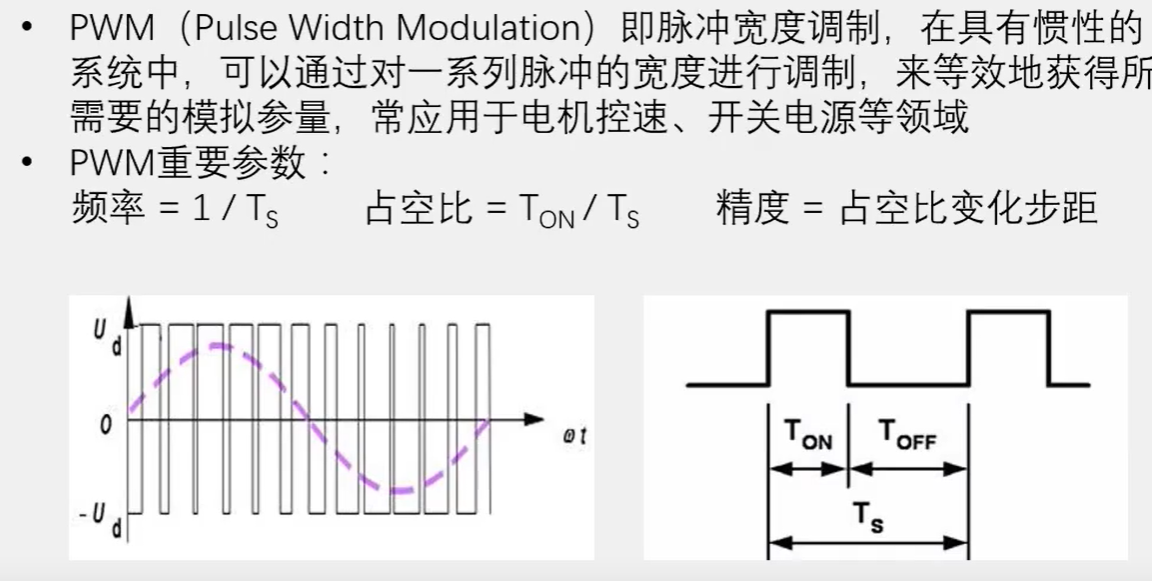
PWM:脉冲信号调制。
比如调 LED 灯,我们可以加一个有电位器的电阻(滑动变阻器)。
电机可能这种方式有局限性,比如电阻太大直接不转,驱动不起来,太小烧毁。
脉冲调制比如:“转2s”“停1s”“转2s”“停1s”……因为电机有惯性,所以可行。
示例:LED 流水灯:
sbit LED=P2^0;
void delay(unsigned char i) //@11.0592MHz
{
while (--i);
}
void main(){
unsigned char period=100;
unsigned char ti;
unsigned char i;
while(1){
for(ti=0;ti<100;ti++){
for(i=0;i<20;i++){
LED=0;
delay(ti);
LED=1;
delay(period-ti);
}
}
for(ti=100;ti>0;ti--){
for(i=0;i<20;i++){
LED=0;
delay(ti);
LED=1;
delay(period-ti);
}
}
}
}
可以利用 timer 来计数,我们知道 timer 是一直增加的,我们可以设置一个比较值,当 timer 大于比较值时输出1,小于时输出0类似这样。
#include "regx52.h"
#include "delay.h"
#include "nixie.h"
#include "timer0.h"
#include "key.h"
sbit LED=P1^0 ;
unsigned char compare;
unsigned int T0Count;
void main(){
unsigned char key;
unsigned char level=1;
time0Init();
compare=5;
while(1){
key=key_scan(0);
if(key==KEY1_PRESS)level++;
else if(key==KEY2_PRESS)if(level>1)level--;
level%=5;
if(level==0)level++;
if(level==1)compare=0;
else if(level==2)compare=50;
else if(level==3)compare=75;
else if(level==4)compare=100;
Nixie_Scan(1,level);
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0xAE;
TH0 = 0xFB;
T0Count++;
if(T0Count>=100)
{
T0Count=0;
}
if(T0Count<compare){
LED=1;
}
else if(T0Count>compare)LED=0;
}
步进电机
电脉冲信号转化为角位移。
**注意步进电机红色线接到5V的地方。**以下程序意为:启动步进电机后,按按钮1旋转方向改变,按按钮2加速,按按钮3减速。
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8;
sbit IN1_A=P1^0;
sbit IN2_B=P1^1;
sbit IN3_C=P1^2;
sbit IN4_D=P1^3;
//定义独立按键控制脚
sbit KEY1=P3^1;
sbit KEY2=P3^0;
sbit KEY3=P3^2;
sbit KEY4=P3^3;
//使用宏定义独立按键按下的键值
#define KEY1_PRESS 1
#define KEY2_PRESS 2
#define KEY3_PRESS 3
#define KEY4_PRESS 4
#define KEY_UNPRESS 0
#define STEPMOTOR_MINSPEED 1
#define STEPMOTOR_MAXSPEED 5
void delay(u16 ten_us)
{
while(ten_us--);
}
void step_motor_28BYJ48_send_pulse(u8 step,u8 dir){
u8 temp=step;
if(dir==0)temp=7-step;//逆时针旋转
switch(temp)//8 个节拍控制:A->AB->B->BC->C->CD->D->DA
{
case 0: IN1_A=1;IN2_B=0;IN3_C=0;IN4_D=0;break;
case 1: IN1_A=1;IN2_B=1;IN3_C=0;IN4_D=0;break;
case 2: IN1_A=0;IN2_B=1;IN3_C=0;IN4_D=0;break;
case 3: IN1_A=0;IN2_B=1;IN3_C=1;IN4_D=0;break;
case 4: IN1_A=0;IN2_B=0;IN3_C=1;IN4_D=0;break;
case 5: IN1_A=0;IN2_B=0;IN3_C=1;IN4_D=1;break;
case 6: IN1_A=0;IN2_B=0;IN3_C=0;IN4_D=1;break;
case 7: IN1_A=1;IN2_B=0;IN3_C=0;IN4_D=1;break;
default:break;
}
}
u8 key_scan(u8 mode)
{
static u8 key=1;
if(mode)key=1;//连续扫描按键
if(key==1&&(KEY1==0||KEY2==0||KEY3==0||KEY4==0))//任意按键按下
{
delay(1000);//消抖
key=0;
if(KEY1==0)
return KEY1_PRESS;
else if(KEY2==0)
return KEY2_PRESS;
else if(KEY3==0)
return KEY3_PRESS;
else if(KEY4==0)
return KEY4_PRESS;
}
else if(KEY1==1&&KEY2==1&&KEY3==1&&KEY4==1) //无按键按下
{
key=1;
}
return KEY_UNPRESS;
}
void main(){
u8 key=0;
u8 dir=0;
u8 speed=STEPMOTOR_MAXSPEED;
u8 step=0;
while(1){
key=key_scan(0);
switch(key)
{
case KEY1_PRESS:dir=!dir;break;
case KEY2_PRESS:if(speed>STEPMOTOR_MINSPEED)speed-=1;break;
case KEY3_PRESS:if(speed<STEPMOTOR_MAXSPEED)speed+=1;break;
default:break;
}
step_motor_28BYJ48_send_pulse(step++,dir);
step%=8;
delay(speed*1000);
}
}



















 1552
1552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











