




 本文介绍如何利用Java和The Visualization Toolkit (VTK)开发一个简单的应用程序来可视化科学数据。VTK是一个强大的C++库,用于处理和渲染数据,并且支持Java接口。通过Java Swing库创建GUI,可以实现与数据的交互,如旋转、平移和缩放。文章详细阐述了配置VTK Java包装器的过程,并讨论了VTK的可视化管道概念。
本文介绍如何利用Java和The Visualization Toolkit (VTK)开发一个简单的应用程序来可视化科学数据。VTK是一个强大的C++库,用于处理和渲染数据,并且支持Java接口。通过Java Swing库创建GUI,可以实现与数据的交互,如旋转、平移和缩放。文章详细阐述了配置VTK Java包装器的过程,并讨论了VTK的可视化管道概念。
官方地址连接

Introduction
In this post we’ll show you how to develop a simple Java application for visualizing scientific data. We will use The Visualization Toolkit (VTK) for the actual data analysis and rendering and Java Swing libraries for a simple GUI that will allow us to modify the plotted output.
Scientific Data Visualization
The typical output from a simulation code is a large file full of numbers. By itself, such a result is rather meaningless. These numbers correspond to the results at various spatial locations. Scientific visualization is the art of converting these numbers into a graphical format that can be understood and aid us in obtaining a new understanding about some physical problem. For example, consider a CAD/flow simulation of a rocket plume. The simulation grid may consist of millions of nodes and on each node we will have a value corresponding to the local plume density. But we may only be interested in the shape of the plume. We can easily visualize the plume by plotting the isosurface of some critical minimum value.
There are both commercial and open-source solutions for performing data visualization. Of the commercial kind, a popular program is Tecplot. The free alternatives include VisIt from Livermore, and Paraview from Kitware, Inc., the creators of the Visualization Toolkit, VTK. However, sometimes these options may not be quite adequate. For instance, you may be developing your own simulation software and would like to bundle the solver with a simple visualization output that will allow the user to study the results in real-time. This is where VTK comes in. The Visualization Toolkit is an amazing collection of C++ classes for processing and visualizing data. It is the engine that does the actual work. VTK is built on the concept of a visualization pipeline. The pipeline starts at one end with the source data and ends at the other end with an actor that correspond to the data’s visual representation. Along the way, in the pipeline, various operations are applied to obtain the output of interest. In order to add visualization to your program, you simply need to provide the algorithm to build the pipeline. The actual data processing and plotting is performed within the VTK library.
VTK provides a simple graphical window that can be used for plotting and interacting with the data (rotation, panning, zoom, etc…). Such an approach may be sufficient for simple console-based applications. But in order to develop an interactive end-user program, you’ll need to incorporate VTK within the GUI of your application. Luckily for us, VTK ships with a built-in support for both QT and Java. The QT/VTK combination was the basis for our simple visualization program, capVTE. Developed in 2003, capVTE attempted to merge a simplified user interface with the open-source nature of VTK, while at the same time supporting new concepts such as immersed and collaborative visualization. You can read more about capVTE here and here (the latter is the draft version but has color pictures). We are currently rewriting the software, however this time we are developing the code in Java. As discussed previously in our article on Java multithreading, the great benefit of Java is that it comes bundled with a large API. Instead of downloading, configuring, and compiling QT (a task for multiple hours), GUI support is natively built into Java via the Swing library.
VTK JAVA Wrappers
So how do you couple VTK with Java? It’s very easy. VTK comes with support for Java in the form of Java wrappers. In the following sections we show you how to install and configure the VTK / Java development environment and how to use it to build a simple Java GUI-driven application.
We are assuming you already have JDK and a Java development environment such as Netbeans or Eclipse installed. In addition you will need to download the VTK source and build it. This requires a working C++ compiler. On Windows, you can obtain the Microsoft Visual Studio Express Edition for free. Then follow these steps to get started:
- Download CMake from cmake.org. CMake is a cross-platform configuration tool for VTK. It will query your system for the available compilers and settings, and will generate the appropriate project files needed to build VTK.
- Download VTK source from vtk.org. Make sure to download the Source package and not the Windows Installer.
- Unzip the source to some temporary directory.
- Configure your project files by running CMake. Specify the location to the source files you just unzipped and also a different directory where to build the files. This build folder is used during the compilation stage, however at the end, files will be installed into the appropriate system folders. Click Configure to start the process. CMake will run for a while performing various system tests. It will finish with another screen with additional options highlighted in red.、
- Enable Java Wrapping by selecting the appropriate check box (see Figure 1). You will also need to enable the shared libraries. I generally uncheck build tests / examples to reduce the compilation time. Press Configure again. If everything went well, you will see the Generate button become available. Press this button to generate the project files.
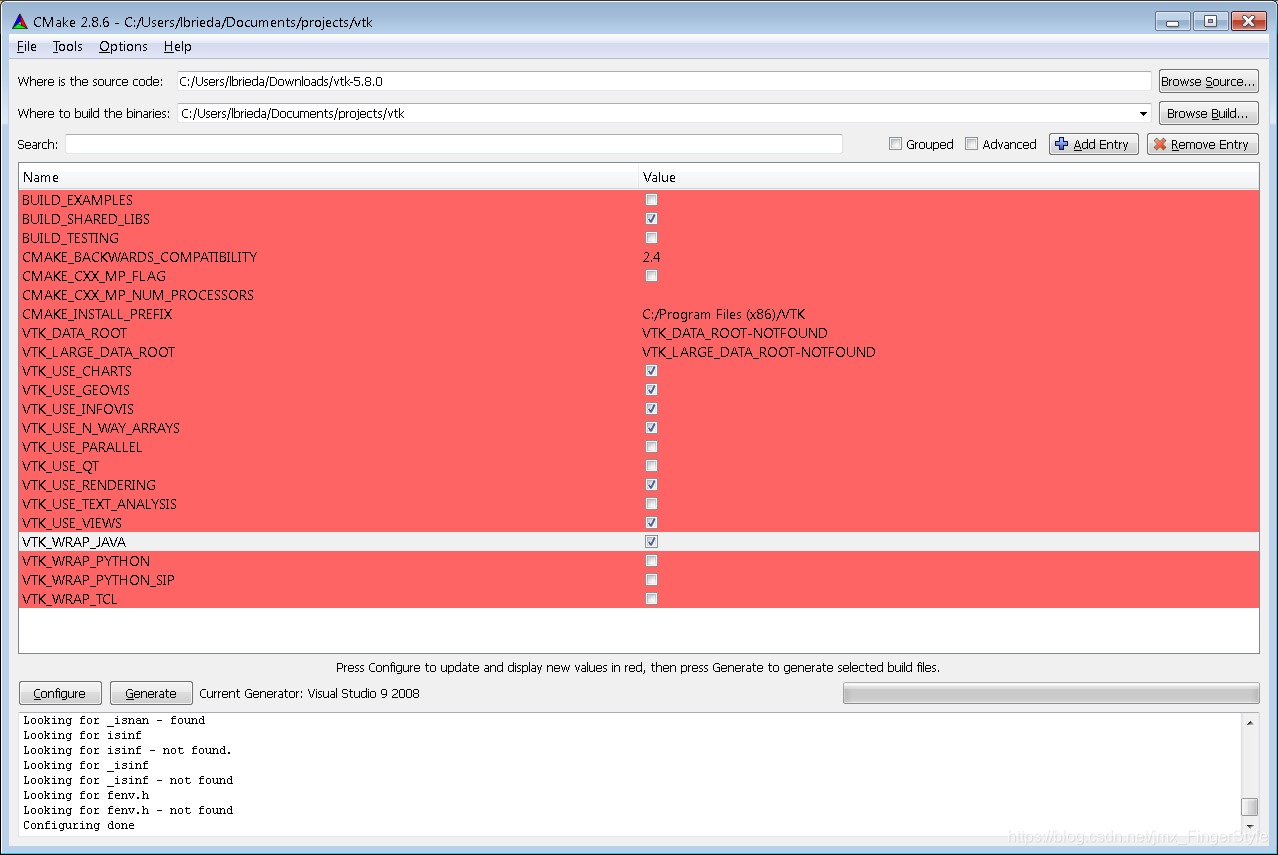
Figure 1. Enable “VTK_WRAP_JAVA” during the CMake Configure process - Compile VTK by launching the solution file located in the build folder. If you are using Visual Studio on Microsoft Windows, right click on ALL_BUILD and then select Build. The compiler with churn for a while. Depending on your machine, this may take multiple hours. If you are using make, use the appropriate make command (most likely make all but this was not tested).
- Install the system libraries, assuming no errors were encountered, by right clicking on INSTALL and selecting Build. Make sure you run Visual Studio as an administrator for this step. If you do encounter linker errors in the Java wrappers, make sure you are linking against the correct version of Java. My machine is running a 64-bit version of Windows 7. However, I only have the 32-bit C++ compilers. My default Java JDK is the 64-bit version, which resulted in an unresolved symbol “__imp__JAWT_GetAWT@8” linker error in vtkRenderingJava. If you do encounter these types of errors, make sure to download the 32-bit version of Java JDK and link against it by adjusting the input path under Linker->Input property page for the appropriate project.
- Check your PATH. The final piece, and likely the biggest headache, is making sure that your Java program can find the required VTK DLLs. These may in turn depend on other DLLs that may not be in the path. Great tool for checking DLL dependencies is Dependency Walker. It took me a while to get everything set up, and in the end, the following directories did the trick. Of course, your setup will likely differ.
C:WindowsSystem32;C:Program Files (x86)VTKbin;C:Program Files (x86)Javajdk1.6.0_30lib;C:Program Files (x86)Javajre6bin;C:Program Files (x86)Javajre6binclient;C:Program Files (x86)Microsoft Visual Studio 9.0VCredistx86Microsoft.VC90.CRT; - Copy vtk.jar to somewhere safe. This file is located in the bin directory in your VTK build folder. It is better to move it out of here in case you later decide to delete the build directory. It is over 1Gb after all and you don’t need it post Install unless you actually plan to modify the VTK libraries themselves.

















 1850
1850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









