



功能:
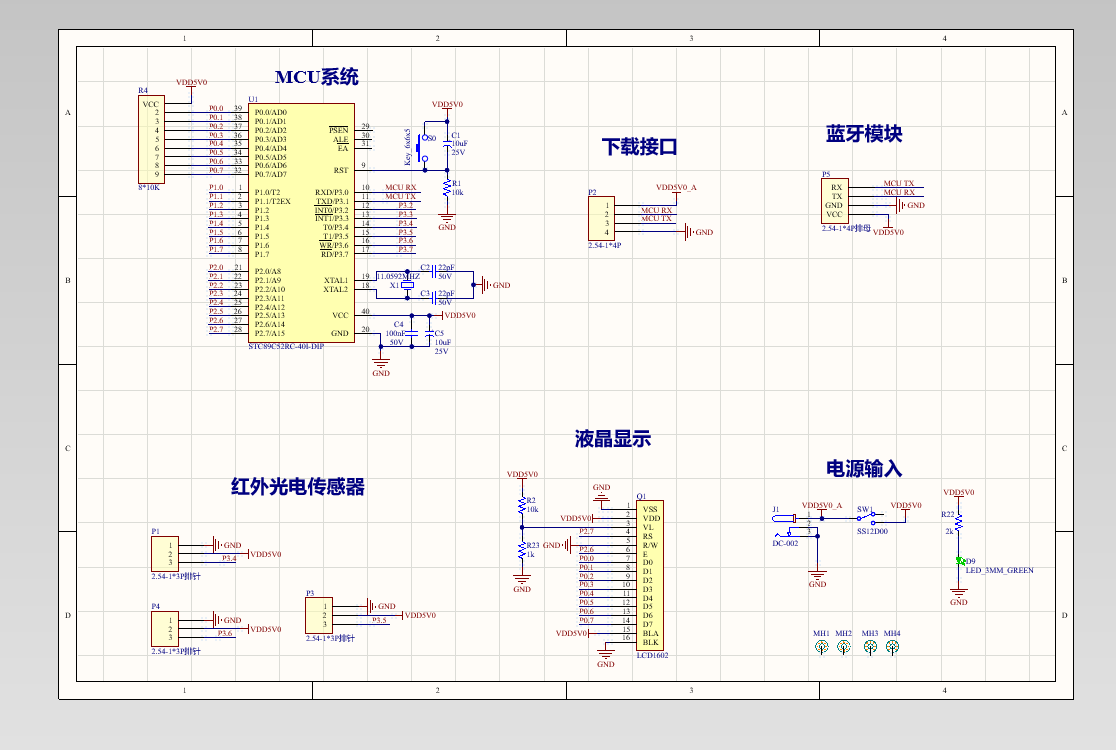
0.本系统采用STC89C52作为单片机
1.系统采用LCD1602液晶实时显示当前车位状态
2.蓝牙串口间隔5秒发送一次当前车位状态
3.车位检测传感器采用的是红外光电模块,该模块的检测距离可达到80cm左右,能满足该项目的需求。
4.采用DC002作为电源接口可直接输入5V给整个系统供电
原理图:
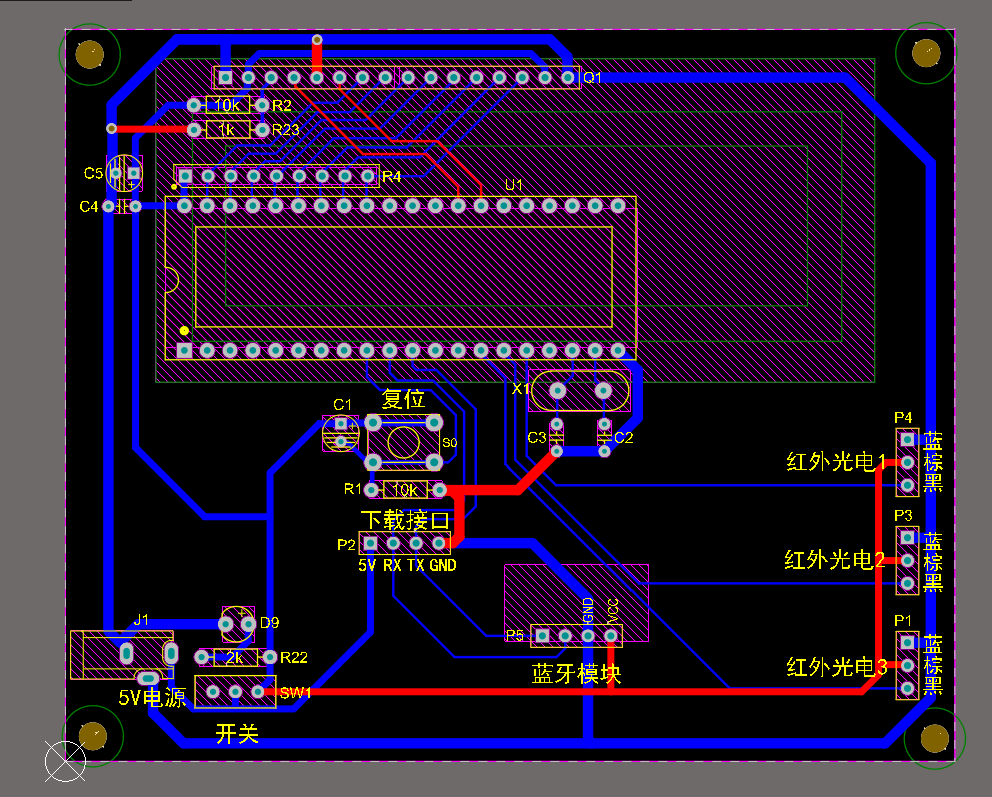
PCB :
主程序:
#include <reg52.h>
#include <intrins.h>
#include <stdio.h>
#include "delay.h"
#include "lcd1602.h"
sbit PARKING_SPACE_1 = P3^6; //接口定义
sbit PARKING_SPACE_2 = P3^5;
sbit PARKING_SPACE_3 = P3^4;
xdata unsigned char dis0[16]; //定义显示区域临时存储数组
xdata unsigned char dis1[16];
unsigned char disFlag = 0; //显示标志
unsigned char i;
bit reportFlag = 0; //上报标志
unsigned char occupiedFlag1 = 0; //位置标志
unsigned char occupiedFlag2 = 0; //位置标志
unsigned char occupiedFlag3 = 0; //位置标志
unsigned char occupiedNum = 0; //占用总数
void Timer0_Init(void); //函数声明
void UART_SendStr(unsigned char *s, unsigned char length);
void UART_Init(void);
void UART_SendByte(unsigned char dat);
void main(void)
{
Timer0_Init(); //定时器0初始化
UART_Init();
LCD_Init(); //初始化液晶
DelayMs(20); //延时有助于稳定
LCD_Clear(); //清屏
while (1)
{
if (PARKING_SPACE_1 == 0) //车位检测到
{
occupiedFlag1 = 1;
} //标志
else
{
occupiedFlag1 = 0;
}
if (PARKING_SPACE_2 == 0) //车位检测到
{
occupiedFlag2 = 1;
} //标志
else
{
occupiedFlag2 = 0;
}
if (PARKING_SPACE_3 == 0) //车位检测到
{
occupiedFlag3 = 1;
} //标志
else
{
occupiedFlag3 = 0;
}
if (disFlag == 1) //定时显示
{
disFlag = 0; //标志位清零
if (occupiedFlag1 == 1)
{
LCD_DispStr(0, 1, "P ");
} //显示占用
else
{
LCD_DispStr(0, 1, "N ");
}
if (occupiedFlag2 == 1)
{
LCD_DispStr(2, 1, "P ");
} //显示占用
else
{
LCD_DispStr(2, 1, "N ");
}
if (occupiedFlag3 == 1)
{
LCD_DispStr(4, 1, "P ");
} //显示占用
else
{
LCD_DispStr(4, 1, "N ");
}
occupiedNum = occupiedFlag1 + occupiedFlag2 + occupiedFlag3; //占用总数
sprintf(dis0, "1 2 3 P:%d N:%d ", (int)occupiedNum, (int)(3 - occupiedNum)); //打印
LCD_DispStr(0, 0, dis0); //显示
}
if (reportFlag == 1) //入库上报一次数据
{
reportFlag = 0; //清楚标志
sprintf(dis1, "P:%d N:%d ", (int)occupiedNum, (int)(3 - occupiedNum)); //打印
if (occupiedFlag1 == 1)
{
UART_SendStr("N01 Parking ", 12);
} //发送占用
else
{
UART_SendStr("N01 Void ", 12);
}
UART_SendStr("\r\n", 2); //换行
DelayMs(1);
if (occupiedFlag2 == 1)
{
UART_SendStr("N02 Parking ", 12);
} //发送占用
else
{
UART_SendStr("N02 Void ", 12);
}
UART_SendStr("\r\n", 2); //换行
DelayMs(1);
if (occupiedFlag3 == 1)
{
UART_SendStr("N03 Parking ", 12);
} //发送占用
else
{
UART_SendStr("N03 Void ", 12);
}
UART_SendStr("\r\n", 2); //换行
DelayMs(1);
UART_SendStr(dis1, 9);
UART_SendStr("\r\n", 2);
}
}
}
void Timer0_Init(void)
{
TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响
TH0 = (65536 - 18432) / 256; //重新赋值 20ms
TL0 = (65536 - 18432) % 256;
EA = 1; //总中断打开
ET0 = 1; //定时器中断打开
TR0 = 1; //定时器开关打开
}
void Timer0_Interrupt(void) interrupt 1
{
static unsigned int time_20ms = 0;
TH0 = (65536 - 18432) / 256; //重新赋值 20ms
TL0 = (65536 - 18432) % 256;
time_20ms++;
if (time_20ms > 500)
{
reportFlag = 1; //串口上报标志 调试使用的
time_20ms = 0;
}
if (time_20ms % 50 == 0) //定时
{
disFlag = 1;
}
}
void UART_Init(void)
{
SCON = 0x50; // SCON: 模式 1, 8-bit UART, 使能接收
TMOD |= 0x20; // TMOD: timer 1, mode 2, 8-bit 重装
TH1 = 0xFD; // TH1: 重装值 9600 波特率 晶振 11.0592MHz
TL1 = TH1;
TR1 = 1; // TR1: timer 1 打开
EA = 1; //打开总中断
ES = 1; //打开串口中断
}
void UART_SendByte(unsigned char dat)
{
unsigned char time_out;
time_out = 0x00;
SBUF = dat; //将数据放入SBUF中
while ((!TI) && (time_out < 100)) //检测是否发送出去
{
time_out++;
DelayUs10x(2);
} //未发送出去 进行短暂延时
TI = 0; //清除ti标志
}
void UART_SendStr(unsigned char *s, unsigned char length)
{
unsigned char cnt;
cnt = 0x00;
while (cnt < length) //发送长度对比
{
UART_SendByte(*s); //放松单字节数据
s++; //指针++
cnt++; //下一个++
}
}
void UART_Interrupt(void) interrupt 4 //串行中断服务程序
{
unsigned char r_buf;
if (RI) //判断是接收中断产生
{
RI = 0; //标志位清零
r_buf = SBUF;
}
if (TI) //如果是发送标志位,清零
{
TI = 0;
}
}

















 1481
1481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









