




 本文深入探讨Maven自动化构建工具的使用与实践,涵盖从基础概念到高级特性,包括依赖管理、生命周期、插件使用及部署流程。通过具体实例,帮助读者掌握Maven在项目构建中的高效应用。
本文深入探讨Maven自动化构建工具的使用与实践,涵盖从基础概念到高级特性,包括依赖管理、生命周期、插件使用及部署流程。通过具体实例,帮助读者掌握Maven在项目构建中的高效应用。
1.自动构建工具maven:先导
- 代替以前单独项目中的package模式
- 代替以前的手动粘贴复制“WEB/lib”
- 规范情况下下载jar包
- 代替一个jar依赖使用手动加入项目中
2.什么是maven
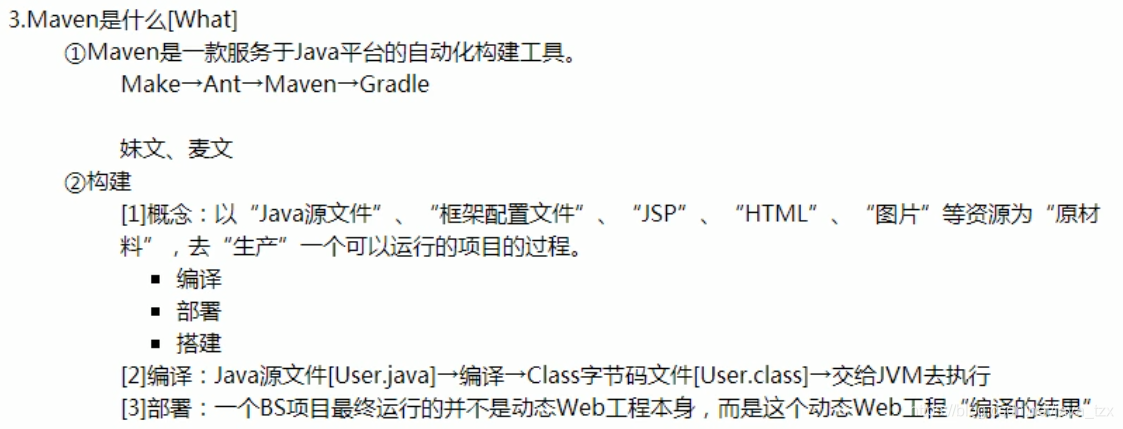
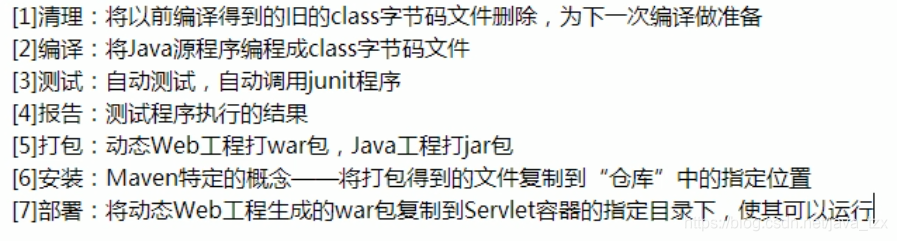
3.maven构建过程中各个环节
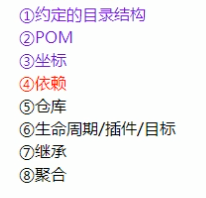
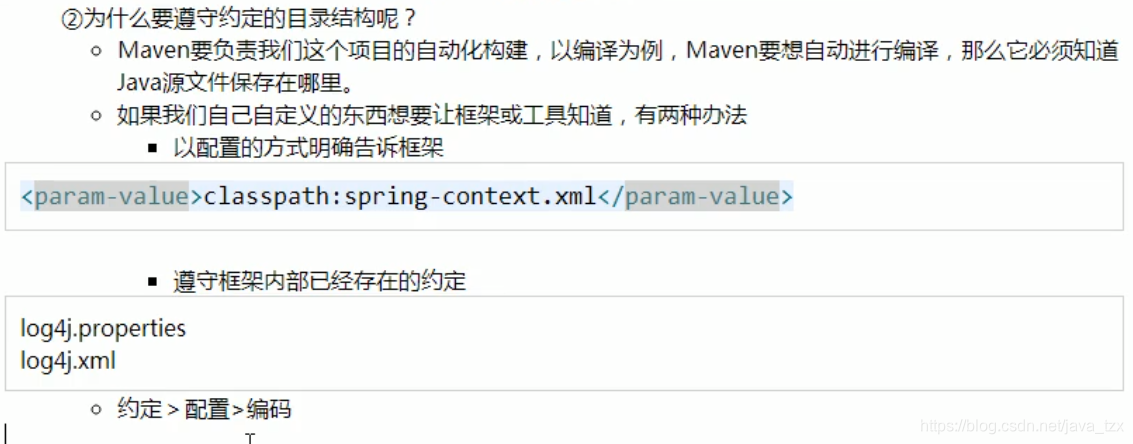
4.maven核心概念
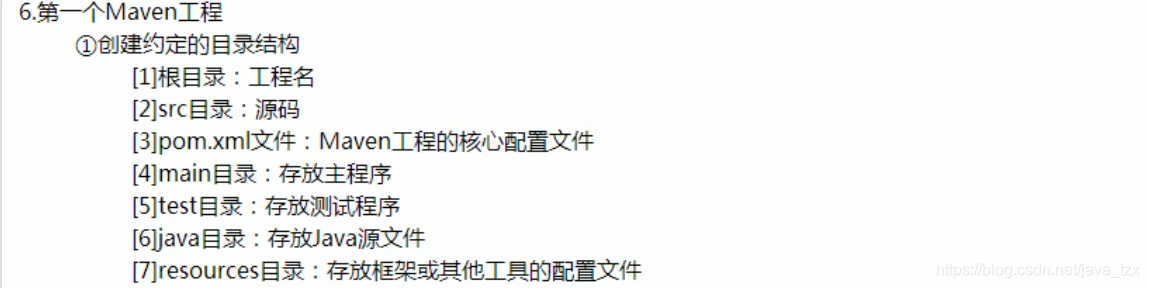
5.第一个maven工程
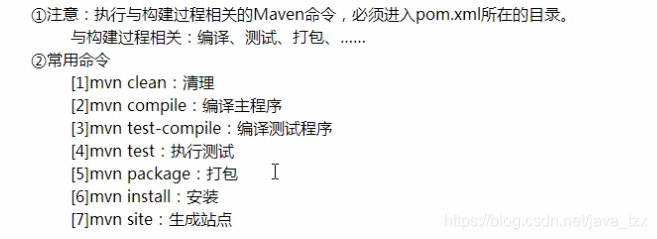
6.常用的maven命令
7.关于联网问题



8.POM

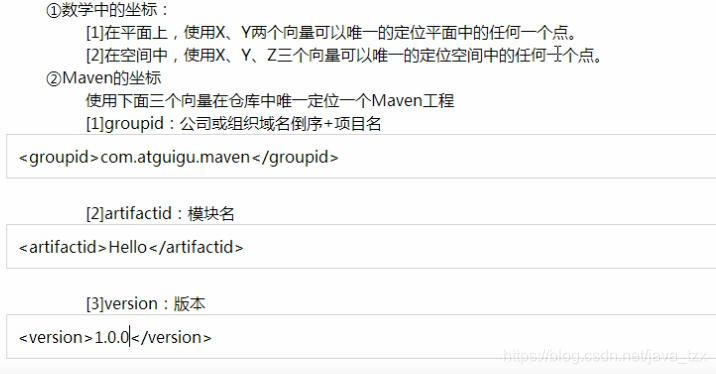
9.坐标
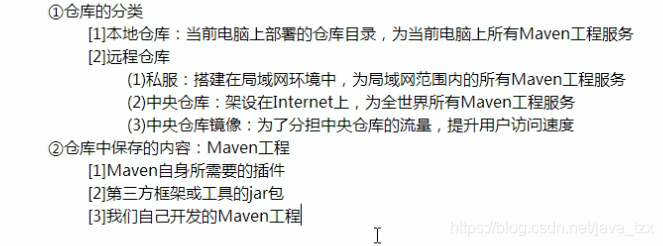
10.仓库
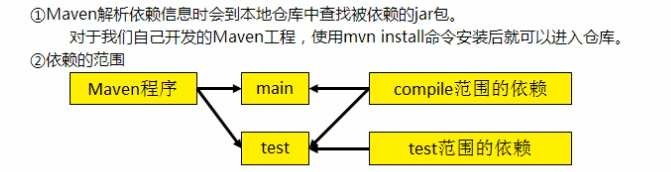
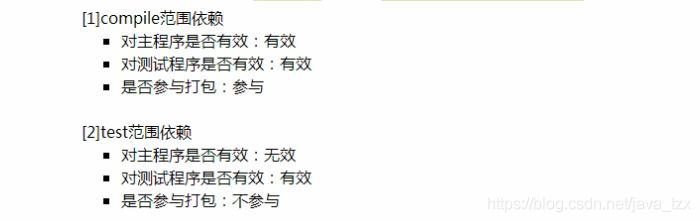
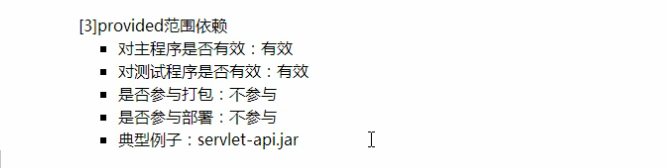
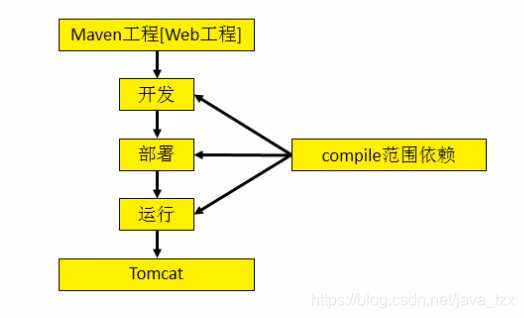
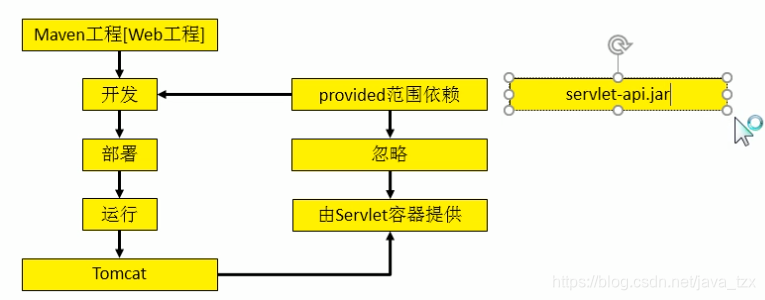
11.依赖
12.生命周期


13.在开发工具中使用Maven插件

14.第三个Maven工程
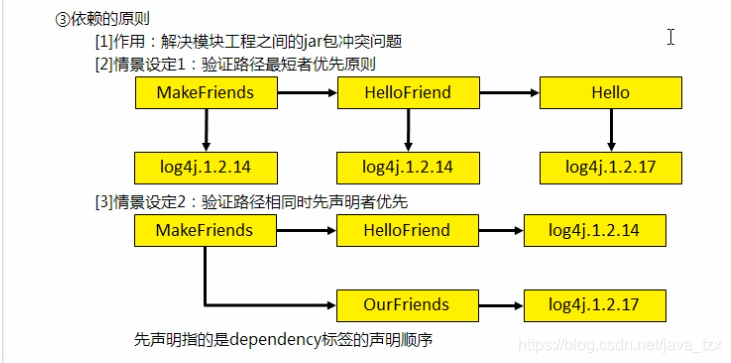
15.依赖的传递性
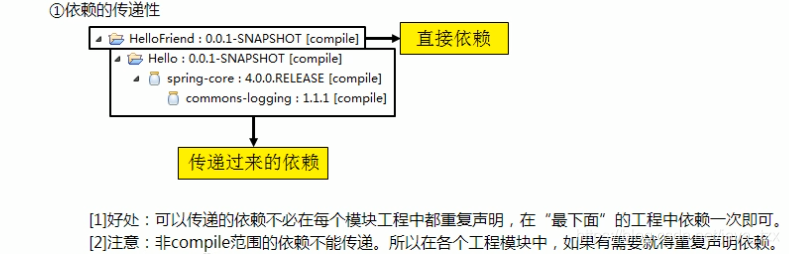

![]()
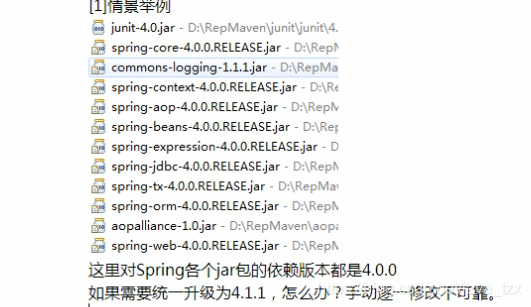

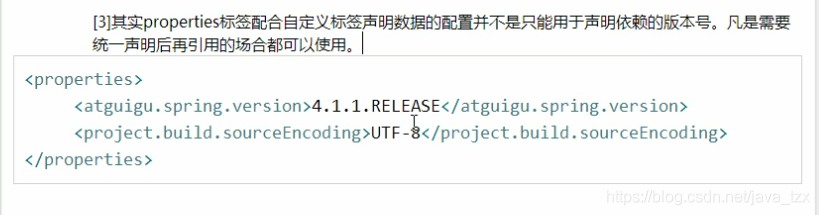
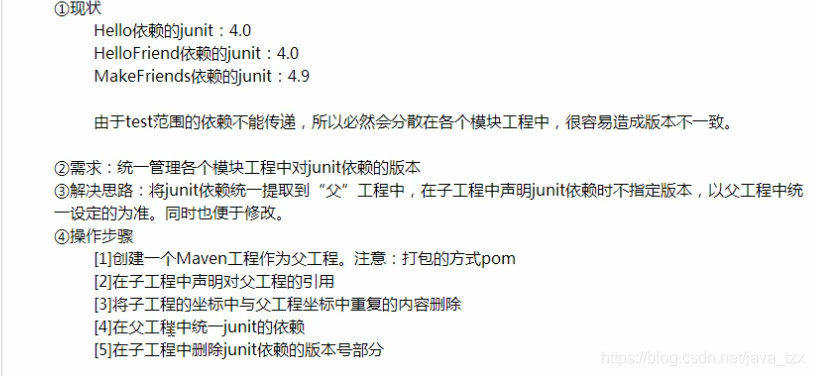
16.继承
【1】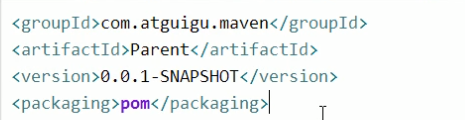 【2】
【2】
【4】
![]()
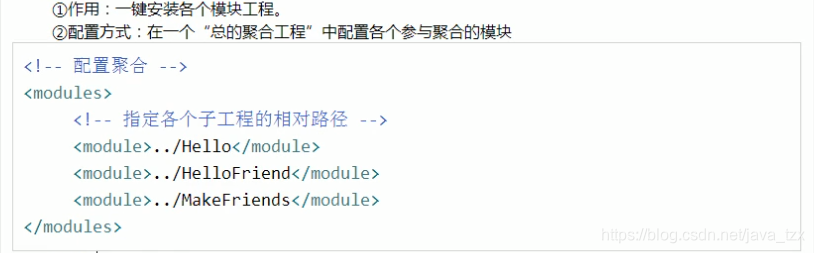
17.聚合 (打包时候可以直接一次完成层级依赖)
![]()
18.Maven的deploy(部署)
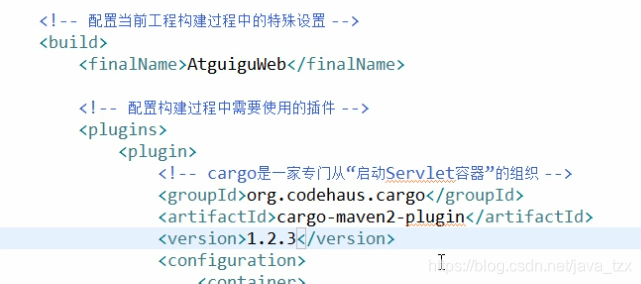

- 代替手动把war放进tomcat的webapps中然后跑服务的过程
- 在pom中配置即可(最好在命令行使用,工具中使用不可停止---不建议使用此命令)

















 9031
9031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









