 VMware安装Rocky Linux指南
VMware安装Rocky Linux指南





下载rocky镜像文件
创建rocky8 文件夹,后边的步骤需要用到
用来放置虚拟机的配置文件
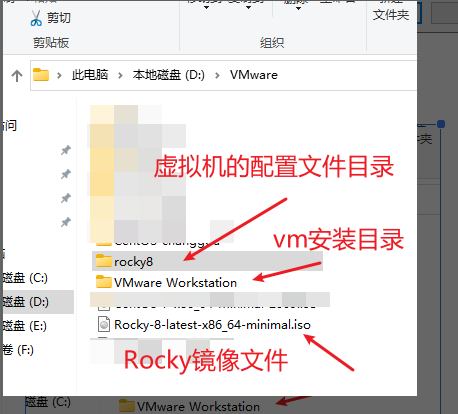
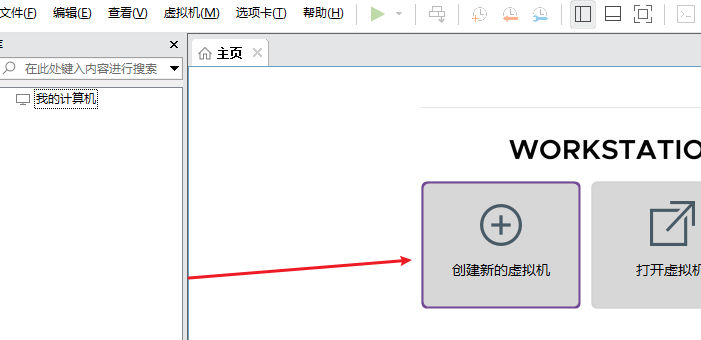
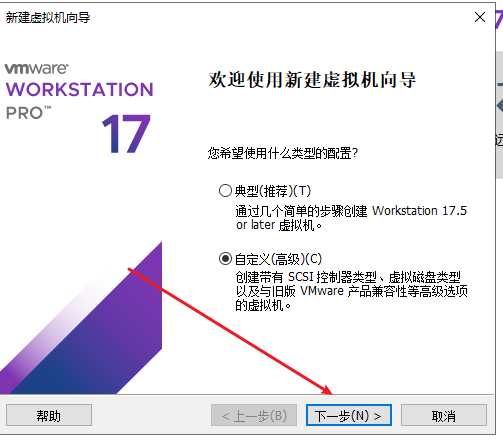
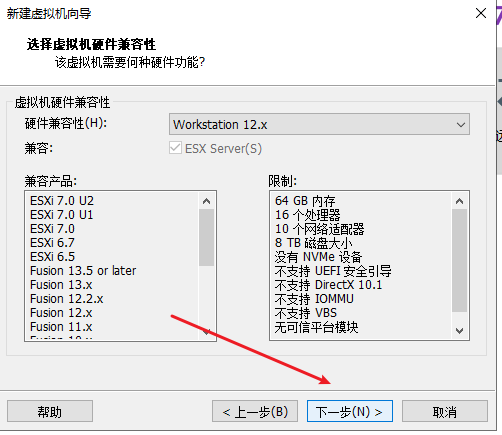
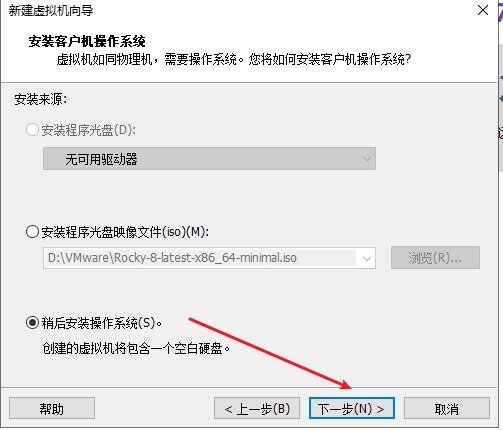
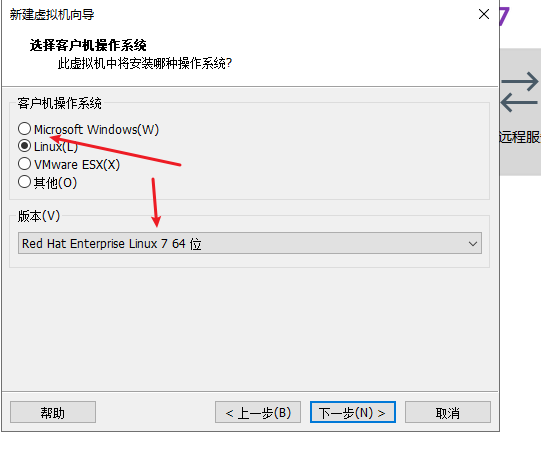
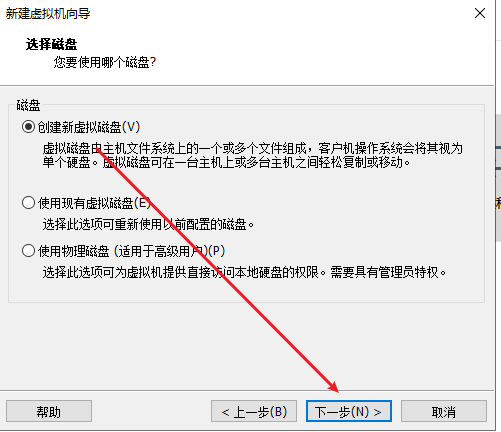
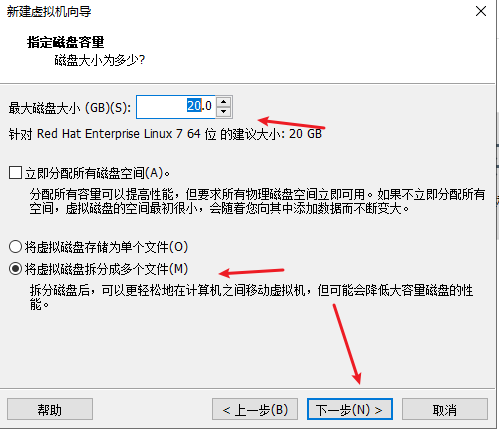
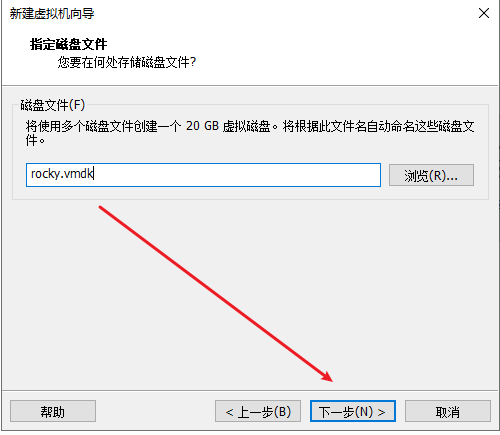
vm安装虚拟机
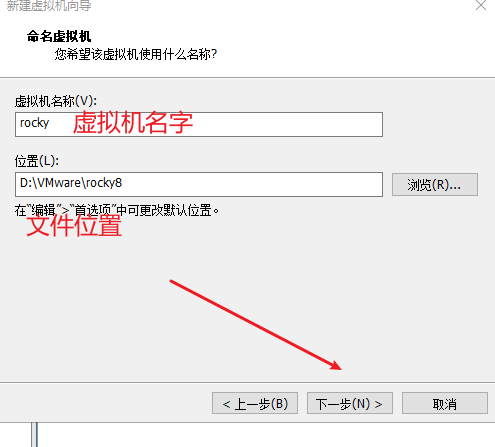
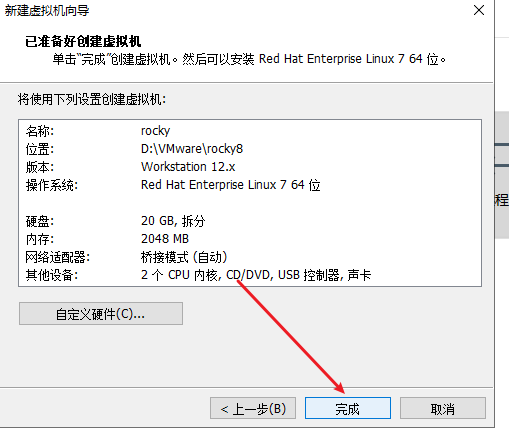
文件位置,是一开始 我们自己创建的rocky8的文件夹
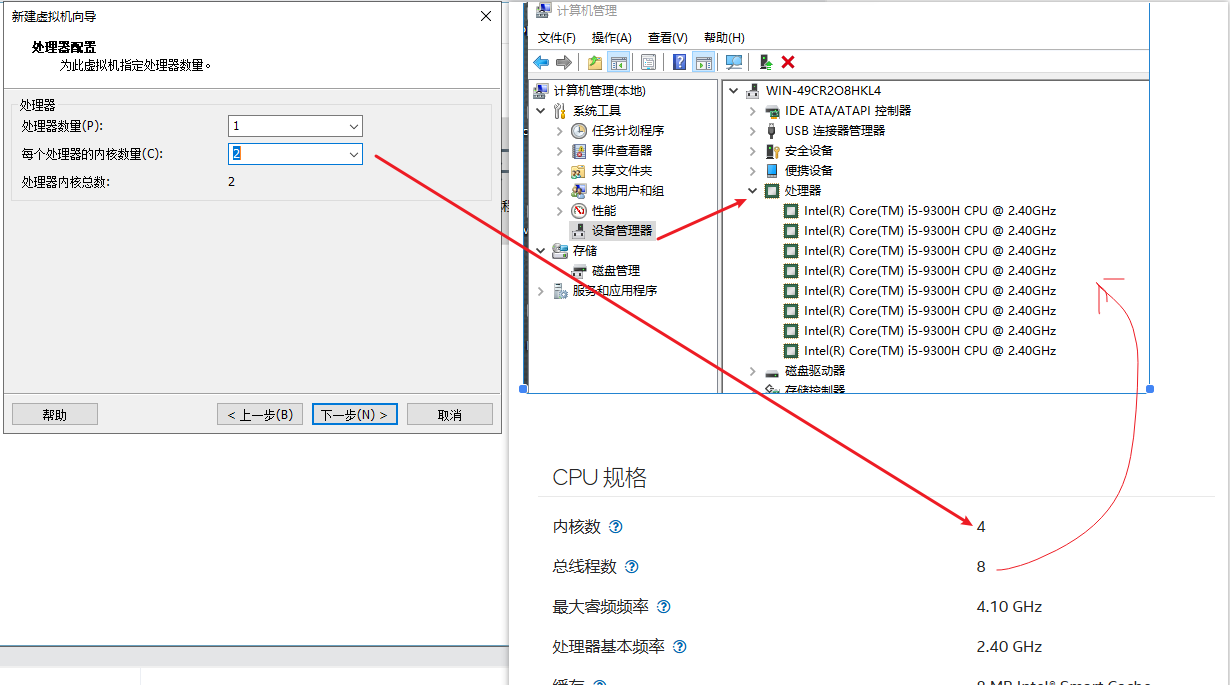
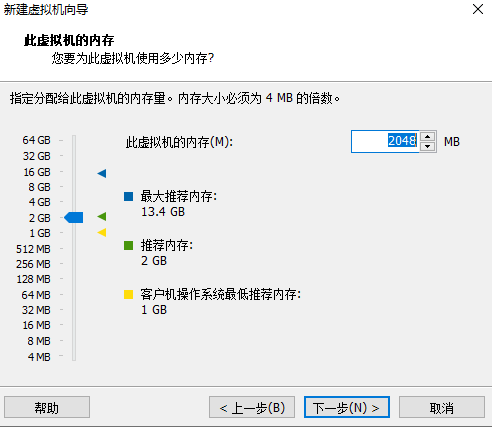
分配处理器,我的是单核cpu 4个处理器,8线程的,所以分了2个给虚拟机
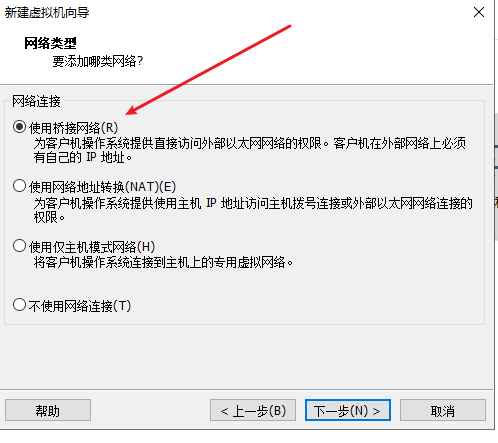
为了简单,我使用了桥接模式
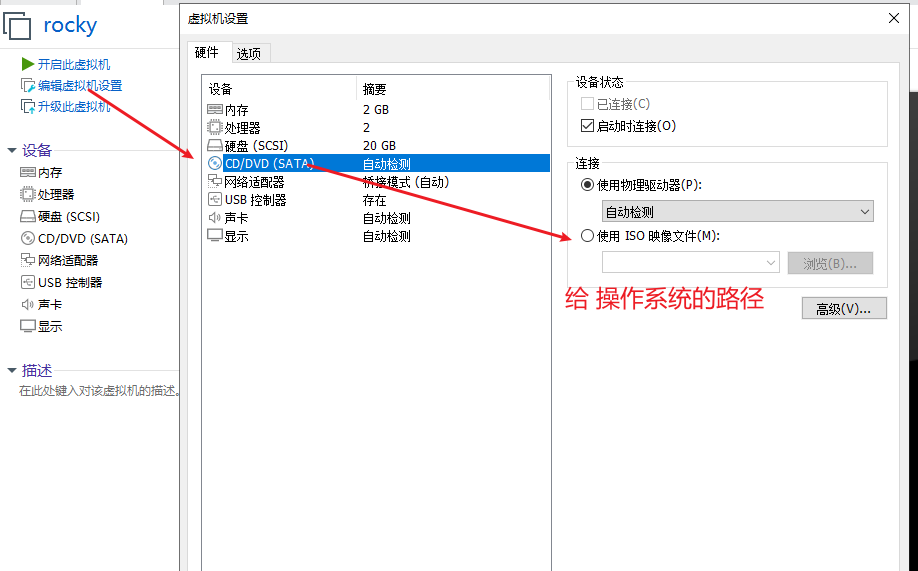
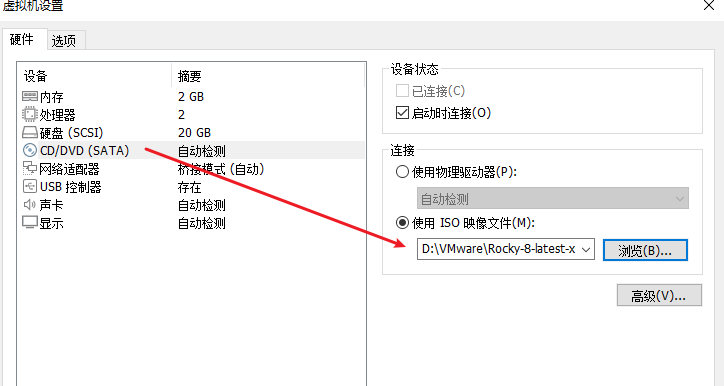
添加rocky镜像文件
是我们下载好的 Rocky-8-latest-x86_64-dvd.iso 文件地址
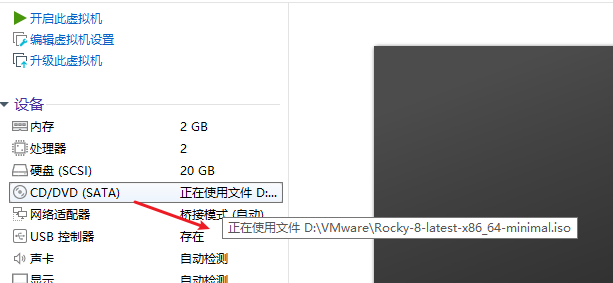
如果配置成功 鼠标移动上去,会显示 完整的文件地址
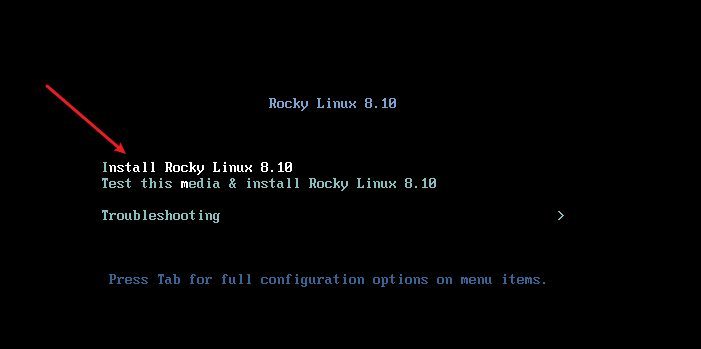
点击 开启 此虚拟机
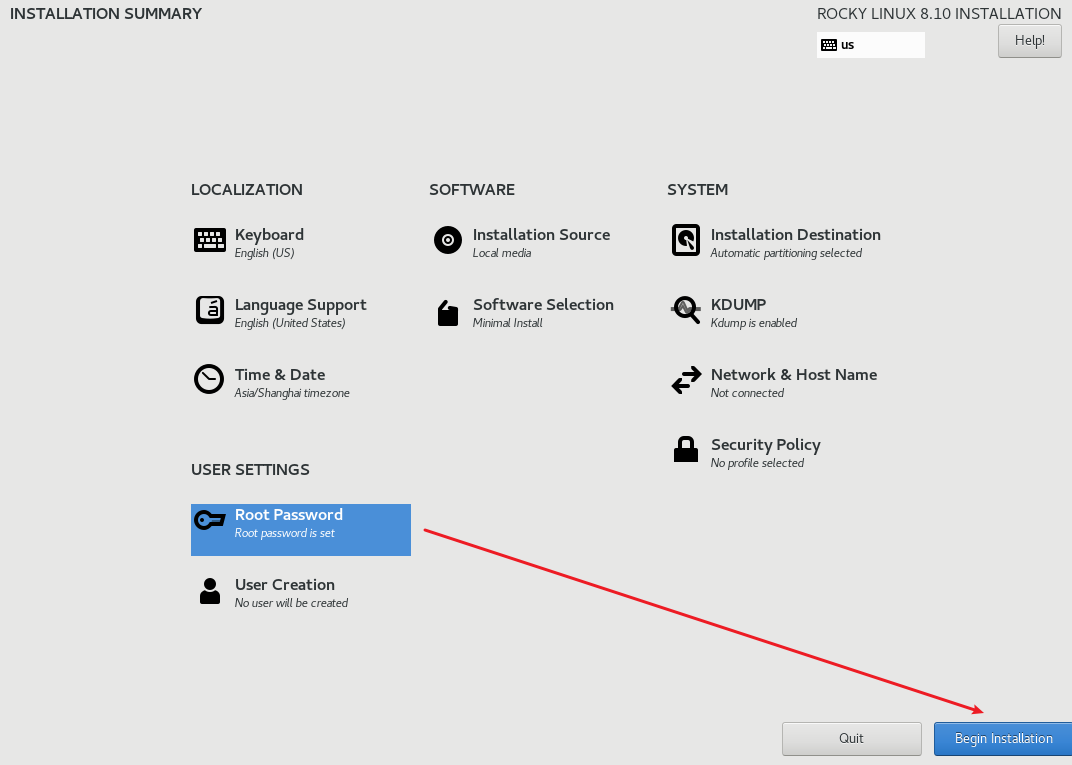
我们设置5部分 分别是时间,系统版本,网络连接,分盘 和root密码
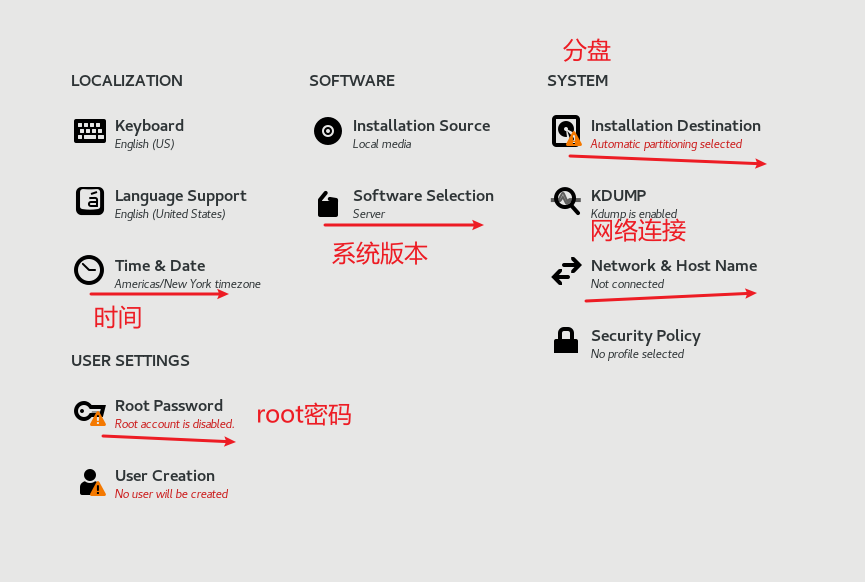
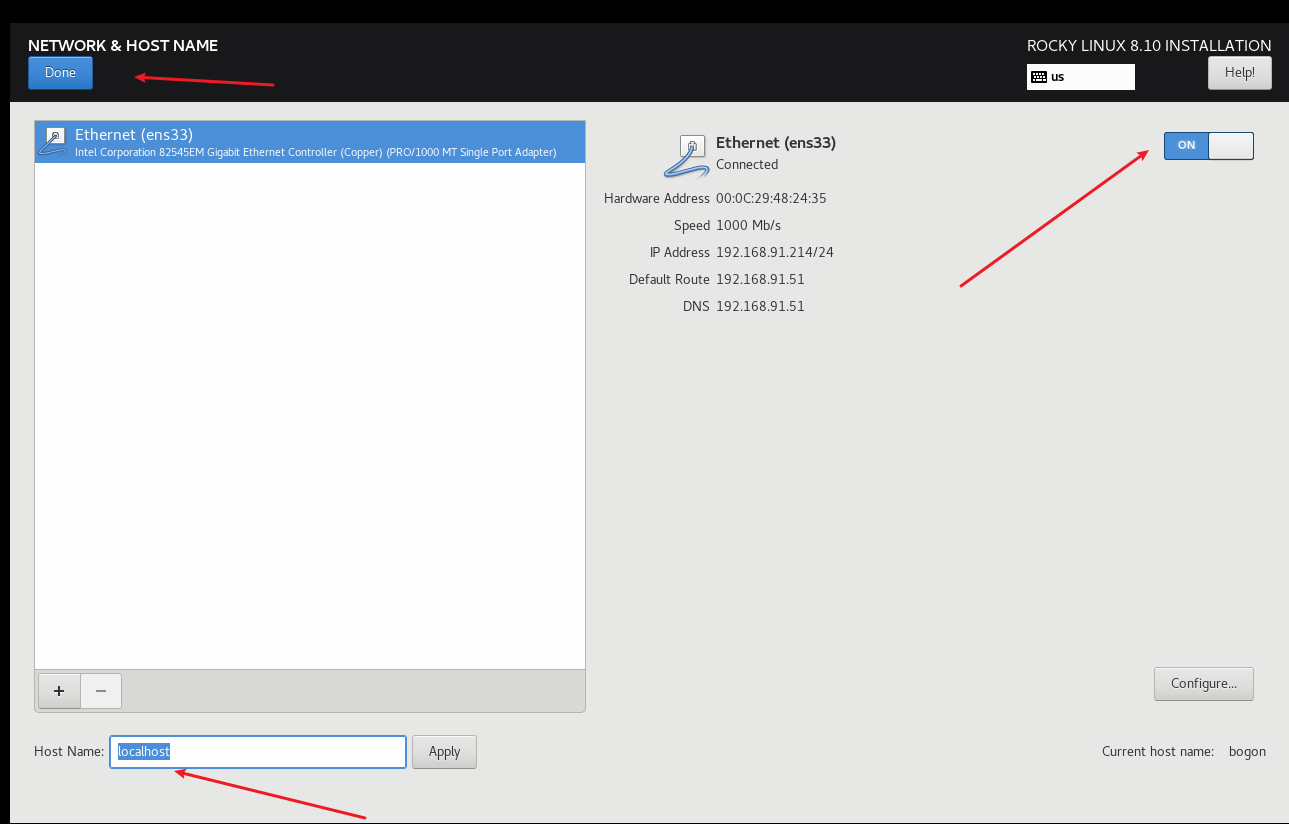
设置网络连接,设置开机自动连接,改变host的名字
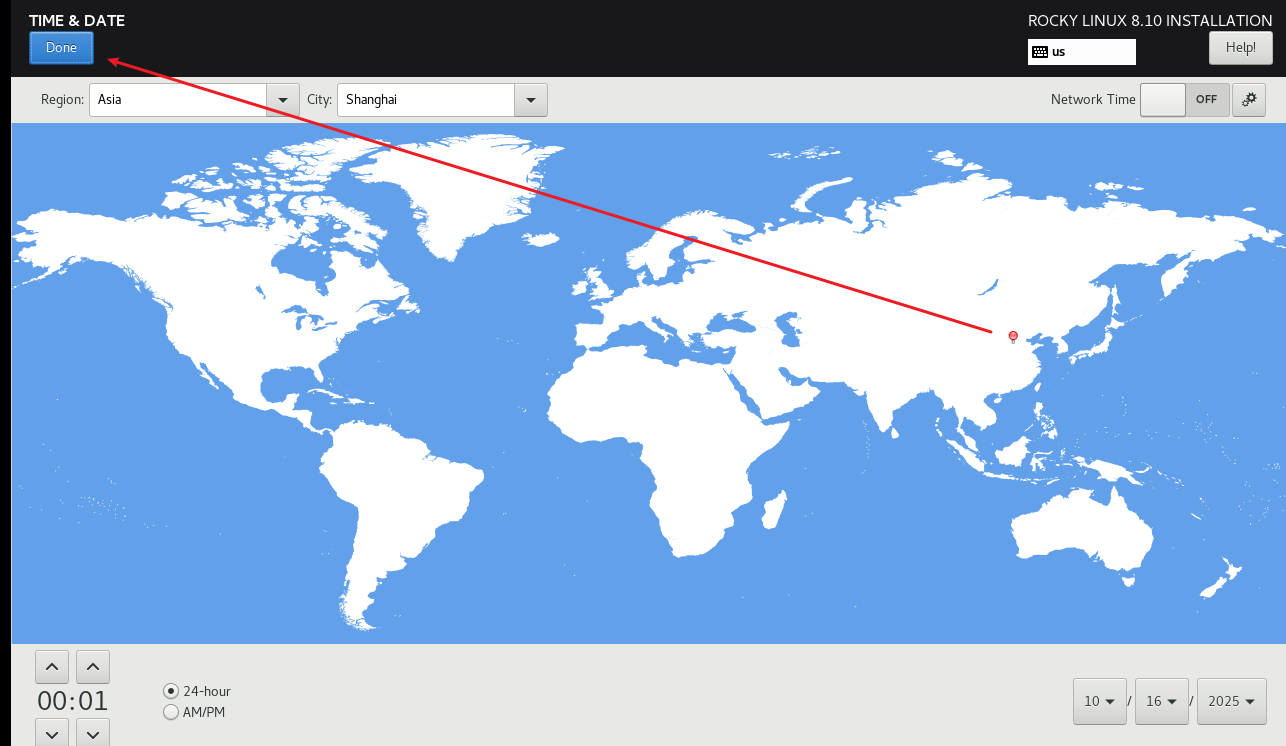
设置时间 使用 上海时间
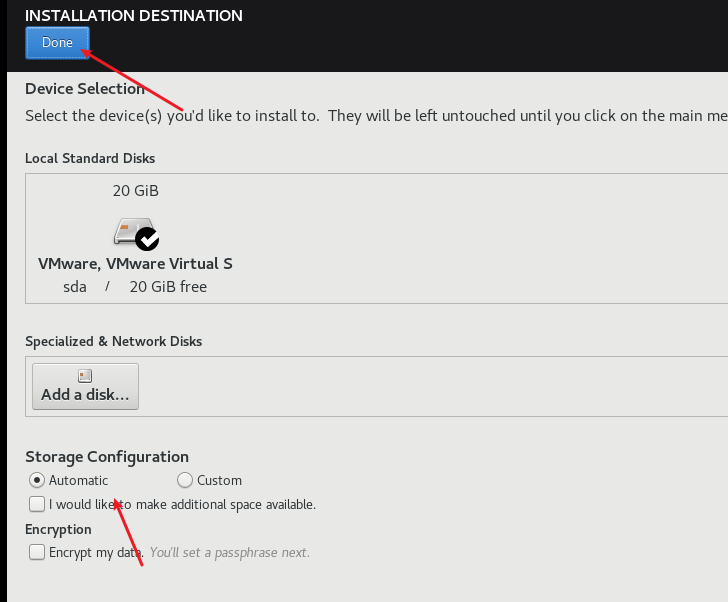
设置分盘 直接使用默认
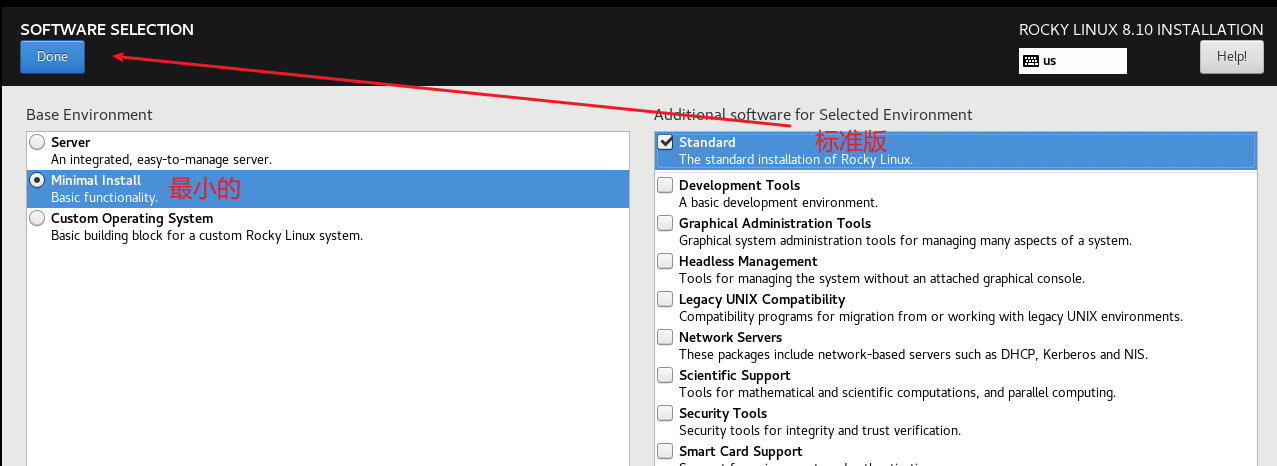
系统使用最小的 标准的
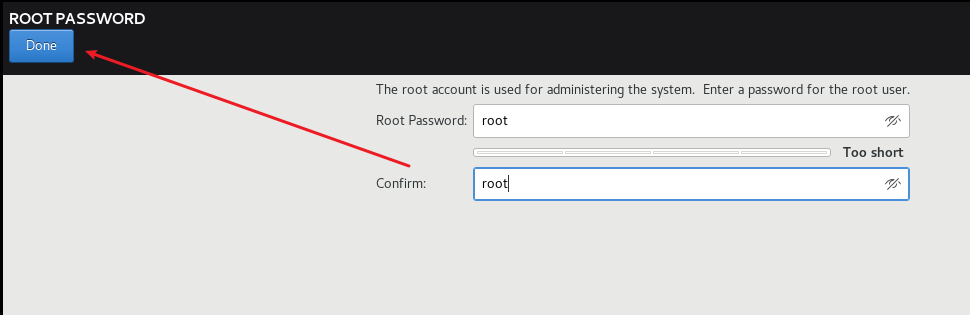
设置root密码,越简单越好,,,因为会忘的 o(╥﹏╥)o
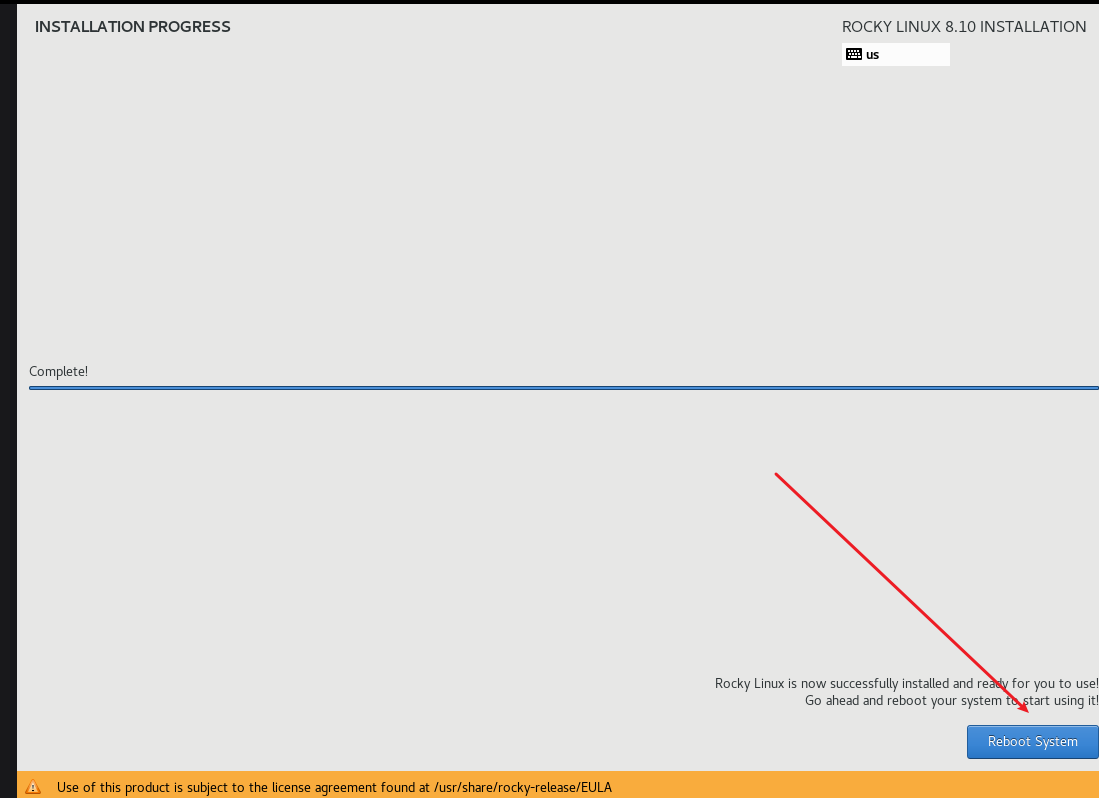
点击安装
安装完成后重启
输入root
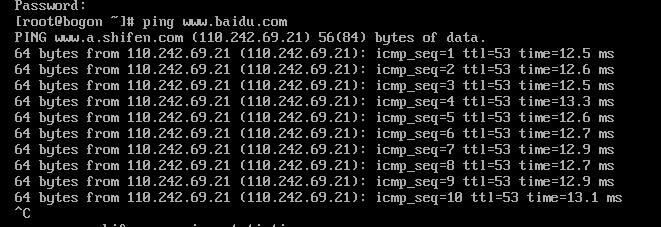
ping www.baidu.com 出现如下现象说明成功了

















 1710
1710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









