



当下程序员的职场压力有目共睹。曾经被认为 “越老越吃香” 的技术岗位,如今却让不少人倍感焦虑。
很多人尝试开辟第二收入曲线来增加安全感,但最后都是草草收场,还浪费了时间。
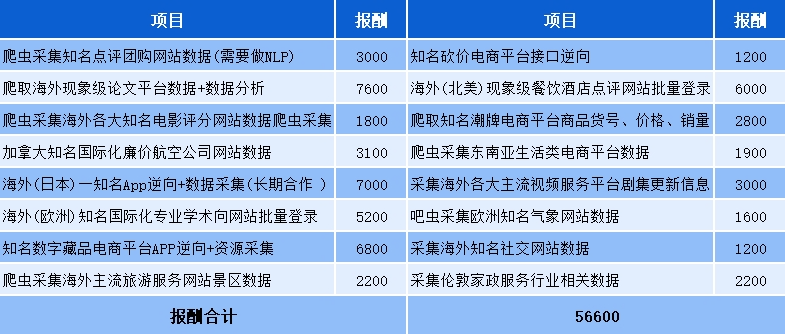
以近两年比较火的python爬虫来举例:
采集这些大厂的网页数据,你知道都价值多少钱吗?
关于python爬虫究竟怎么样实现副业创收你都知道了吗?
Python 爬虫接单创收最核心的技术你都掌握了吗?
所以,不是没有合适的副业,而是对市场价值的认知,需要过硬的技术能力来承接。
爬虫需要学到什么程度?
如果是你只会aes、des等简单的算法系加密,做简单的网页数据采集,项目金额也有几百;
如果你掌握了大厂系列的技术加密,就能接到上千的订单;
如果你能解决各系列的验证码等等问题,那么接到的订单价值会更高...
能赚钱的副业很多,但是爬虫一定是最适合程序员的副业。
Python 语法与程序员日常所用语言高度相通,所以想要接单赚钱只需要经过短期的专项训练即可。
如何快速学习Python爬虫
能把爬虫技术变现永远是重点,要想快速搞定爬虫,这节免费的爬虫逆向开发实战特训营或许能够帮助你!
搞定技术,接单赚钱!
👇👇👇

不可多得的爬虫好课,官方报名费399元。本号粉丝有福利,立即报名可免费学习!

这是一套包含爬虫逆向破解技术和爬虫商业接单详解的爬虫接单实战课,由图灵接单工作室创始人—James老师带大家学习,帮助大家快速进阶。

此次实战训练,有顶尖名师的专业指导与规划,搭配最前沿的爬虫逆向实战项目边学边练,在实战中快速累积经验,熟悉之后即可开始尝试接单。
课程详情
第一节:Python爬虫接单-1500的单案例实操
1、详解Python商业接单渠道分析和接单流程
2、详解千+订单的实操变现全过程
3、详解爬虫技术解决接口分析和需求问题
4、案例分析-详解国内大型网站加密逆向及快速变现
5、案例分析-分享10个变现案例解决方案
6、详解web3.0网站加密逆向与ob混淆
7、详解JS逆向魔改加密算法还原
8、详解代码混淆核心分析解决方式
9、详解爬虫技术市场应用及接单技巧
第二节:Python爬虫接单-12k大单高效实操
1、详解国内知名大型网站验证码案例拆解(实战)
2、详解10k大单步骤拆分在限时完成
3、详解12k大单JS逆向解决数据解密核心逻辑
4、详解AES与RSA加密处理解决方案
5、详解浏览器指纹的加密核心原理
6、详解Python技术的变现流程与方法及长远规划
7、详解代码混淆核心分析与解决方案
8、详解滑块轨迹的解密及代码逻辑
课程福利
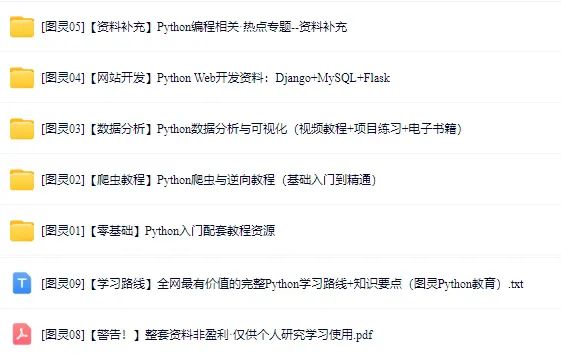
参与报名并学完课程的朋友,可以免费获得一套精心整理的实战教程礼包!

学完速成干货课程,要第一时间拿大厂高阶项目实战巩固,进一步提升技术,这套教程就非常适合练手!
部分资料(内容持续更新):
小提示
Q:加了小助理为什么没通过?
A:一下子很多人报名,小助理的微信可能会出现延迟。暂时加不上的朋友们还请耐心等待,小助理会尽快处理。
Q:真的是免费吗?
A:本公众号粉丝仅需0元即可学习,真实有效。

















 552
552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









