




 本文详细介绍了狄克斯特拉算法的基本原理及其在加权图中寻找最短路径的应用。主要内容包括算法的四个核心步骤、术语解释、负权边的影响及应对策略,并通过实例演示了算法的具体实现。
本文详细介绍了狄克斯特拉算法的基本原理及其在加权图中寻找最短路径的应用。主要内容包括算法的四个核心步骤、术语解释、负权边的影响及应对策略,并通过实例演示了算法的具体实现。
算法图解第七章笔记与习题(狄克斯特拉算法)
算法图解pdf百度云链接,提取码:jttg
7.1 狄克斯特拉(Dijkstra)算法
广度优先算法可以找出在最短路径,而狄克斯特拉算法可以找出最快路径。
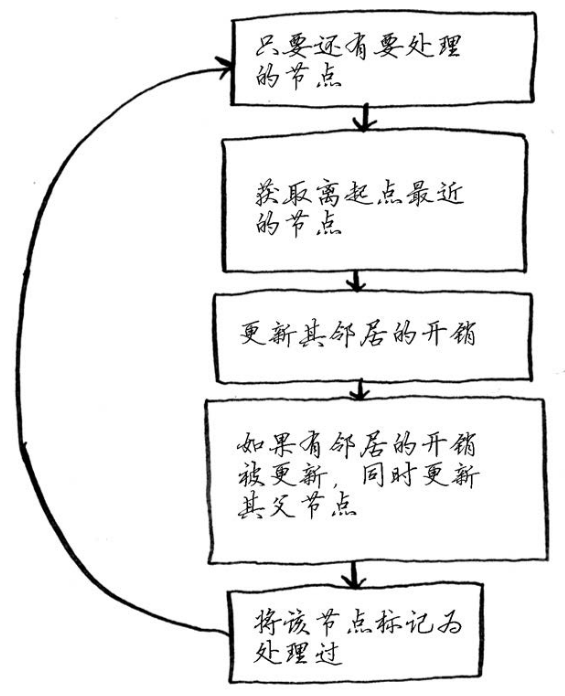
狄克斯特拉算法包含4个步骤:
(1) 找出最便宜的节点,即可在最短时间内前往的节点。
(2) 对于该节点的邻居,检查是否有前往它们的更短路径,如果有,就更新其开销。
(3) 重复这个过程,直到对图中的每个节点都这样做了。
(4) 计算最终路径。
7.2 术语介绍
- 迪杰斯特拉算法用于每条边都有关联数字的图,这些数字称为权重(weight)。
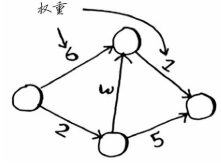
- 带权重的图称为加权图(weighted graph),不带权重的图称为非加权图(unweighted graph)。
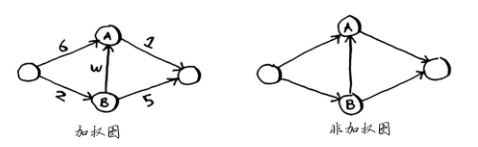
要计算非加权图中的最短路径,可使用广度优先搜索。要计算加权图中的最短路径,可使用狄克斯特拉算法。
图中可能会有环,即可以走回原点的图。
对于无向图来说,每条边都是一个环。狄克斯特拉算法只适用于有向无环图(directed acyclic graph,DAG)。
狄克斯特拉算法的关键理念是:找出图中最便宜的节点,并确保没有到该节点的更便宜的路径!
7.3 负权边
负权边:在图中,可能出现边的权重为负数的情况,即经过这条边时,花销反而减少。
如果有负权边,则不能使用狄克斯特拉算法。
因为狄克斯特拉算法有一个前提假设:对于处理过的节点,没有前往该节点的更短路径。而负权边破坏了这一假设,使得算法不成立。
在包含负权边的图中,要找出最短路径,可使用另一种算法——贝尔曼-福德算法(Bellman-Ford algorithm)。
7.4 实现
以下图为例实现狄克斯特拉算法的代码:
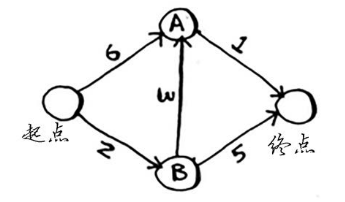
要解决这个问题,需要先画出三个散列表:
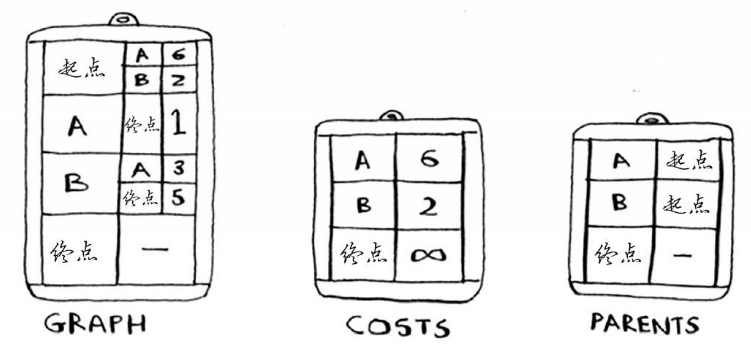
随着算法的进行,将不断更新散列表costs和parents。
首先需要实现这个图,由于需要同时存储邻居和前往邻居的开销,因此需要使用散列表嵌套散列表。
graph["start"] = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
另外,仍需要一个散列表来存储每个节点的开销(指从起点出发前往该节点需要的时间)。以及一个散列表存储父节点,用来更新最短路径。
最后还需要一个数组用来记录处理过的节点,因为对于同一个节点,不需要多次处理。
算法的整体流程图如下:
# 添加节点和邻居
graph = {}
graph["start"] = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
graph["a"] = {}
graph["a"]["fin"] = 1
graph["b"] = {}
graph["b"]["a"] = 3
graph["b"]["fin"] = 5
graph["fin"] = {} # 终点没有邻居
# 存储每个节点开销的散列表
infinity = float("inf")
costs = {}
costs["a"] = 6
costs["b"] = 2
costs["fin"] = infinity
# 存储父节点的散列表
parents = {}
parents["a"] = "start"
parents["b"] = "start"
parents["fin"] = None
processed = [] # 一个数组,用于记录处理过的节点。因为对于同一个节点,不用处理多次。
def find_lowest_cost_node(costs):
lowest_cost = float("inf")
lowest_cost_node = None
# 遍历所有的节点
for node in costs:
cost = costs[node]
# 如果当前节点的开销更低且未处理过
if cost < lowest_cost and node not in processed:
# 就将其视为开销最低的节点
lowest_cost = cost
lowest_cost_node = node
return lowest_cost_node
# 在未处理的节点中找出开销最小的节点
node = find_lowest_cost_node(costs)
# 这个while循环在所有节点都被处理过后结束
while node is not None:
cost = costs[node]
# 遍历当前节点的所有邻居
neighbors = graph[node]
for n in neighbors.keys():
new_cost = cost + neighbors[n]
# 如果经当前节点前往该邻居更近
if costs[n] > new_cost:
# 就更新该邻居的开销
costs[n] = new_cost
# 同时将该邻居的父节点设置为当前节点
parents[n] = node
# 将当前节点标记为处理过
processed.append(node)
# 找出接下来要处理的节点,并做循环
node = find_lowest_cost_node(costs)
print ("Cost from the start to each node:")
print (costs)
#Cost from the start to each node:
{'a':5, 'b':2, 'fin':6}
7.5 小结
- 广度优先搜索用于在非加权图中查找最短路径。
- 狄克斯特拉算法用于在加权图中查找最短路径。
- 仅当权重为正时狄克斯特拉算法才管用。
- 如果图中包含负权边,请使用贝尔曼·福德算法。
练习
习题7.1:
- 在下面的各个图中,从起点到终点的最短路径的总权重分别是多少?
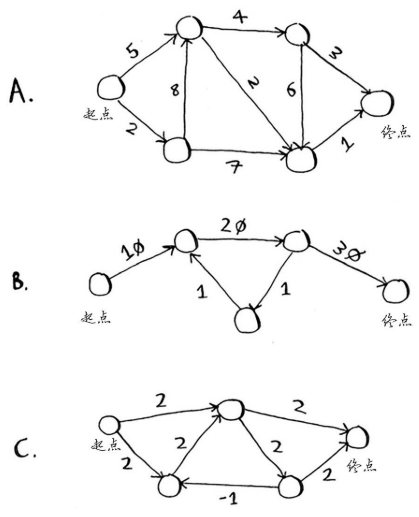
A:起点→5→2→1,到达终点,总权重为8。
B:起点→10→20→30,到达终点,总权重为60。
C:起点→2→2,到达终点,总权重为4。(用狄克斯特拉算法无法获取最短路径)

















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









