




前言
本文针对飞控需要增加新的CAN驱动执行器,如电机等定义UAVCAN节点,并进行使用。
只进行了前期的开发,完成了
.uavcan消息定义和简单的发送。
作者接触can和uavcan 的时间很短,内容如有错误,请在评论区指出,多交流。
一、执行器通信协议
执行器为市面上某款电机,通信协议为can,不支持uavcan 协议,STM32通信协议如下:
angle_to_can_offset(target_angle1*scale, tx_buf1);
// MyCAN_Transmit(0x01, 5, tx_buf1);
void angle_to_can_offset(float value, uint8_t tx_buf[5])
{
// 将float强制转换为int32_t
int32_t int_value = (int32_t)value;
// 将int32_t转换为4个uint8_t字节(大端序)
tx_buf[0] = 0x1E;
tx_buf[1] = int_value & 0xFF; // 最低位字节
tx_buf[2] = (int_value >> 8) & 0xFF; // 次低位字节
tx_buf[3] = (int_value >> 16) & 0xFF; // 次高位字节
tx_buf[4] = (int_value >> 24) & 0xFF; // 最高位字节
如果飞控无其他uavcan协议传感器和执行器,可直接关掉uavcan接口,使用系统原有can接口控制电机。
后续有时间总结如何直接使用can接口输出控制数据。(并不是所有飞控板都可以实现,且uavcan将无法使用,目前还没有实现一个can接口uavcan,一个can接口普通can)
二、UAVCAN消息定义
在…\Firmware\src\drivers\uavcan\libuavcan\dsdl 中可以看到定义了许多uavcan消息,其命名有以下相似
命名规范:ID.MessageName.uavcan

结合电机的通信协议,增加 uavcan/libuavcan/dsdl/uavcan/equipment/actuator/1200.HpjmTiltMotor.uavcan,写入以下代码
uint8 motor_id # Motor ID
uint8 header = 0x1E # Fixed packet header
int32 angle_data # Angle data
在 …\Firmware\src\drivers\uavcan\CMakeLists.txt 中,有以下代码,即dsdl内的.uavcan文件均被编译,生成在...\include\dsdlc_generated中。
# generated DSDL
set(DSDLC_DIR "${CMAKE_CURRENT_SOURCE_DIR}/dsdl")
set(DSDLC_INPUTS
"${LIBUAVCAN_DIR}/dsdl/ardupilot"
"${LIBUAVCAN_DIR}/dsdl/com"
"${LIBUAVCAN_DIR}/dsdl/cuav"
"${LIBUAVCAN_DIR}/dsdl/dronecan"
"${LIBUAVCAN_DIR}/dsdl/uavcan"
)
set(DSDLC_OUTPUT "${CMAKE_CURRENT_BINARY_DIR}/include/dsdlc_generated")
因此,通过编译飞控,可以在下边文件夹获得 HpjmTiltMotor.hpp
…\Firmware\build\cuav_x7pro_default\src\drivers\uavcan\include\dsdlc_generated\uavcan\equipment\actuator\HpjmTiltMotor.hpp
三、UAVCAN消息使用
结合前边生成的HpjmTiltMotor.hpp,发送电机控制信号。
1. 初始化函数
结合…\Firmware\src\drivers\uavcan\actuators 中文件,新建 tiltmotor.hpp 和 tiltmotor. cpp文件:
- tiltmotor.hpp
#pragma once
#include <uavcan/uavcan.hpp>
#include <uavcan/equipment/actuator/HpjmTiltMotor.hpp>
class TiltMotorController
{
public:
TiltMotorController(uavcan::INode &node);
int init();
void send_fixed_command(uint8_t motor_id, int32_t angle);
private:
uavcan::Publisher<uavcan::equipment::actuator::HpjmTiltMotor> _pub;
};
- tiltmotor. cpp
#include "tiltmotor.hpp"
TiltMotorController::TiltMotorController(uavcan::INode &node) :
_pub(node)
{
}
int TiltMotorController::init()
{
// Publisher 不需要 start(),直接返回 0
return 0;
}
void TiltMotorController::send_fixed_command(uint8_t motor_id, int32_t angle)
{
uavcan::equipment::actuator::HpjmTiltMotor msg;
msg.motor_id = motor_id;
msg.angle_data = angle;
_pub.broadcast(msg); // 直接广播
}
- 在…\Firmware\src\drivers\uavcan\CMakeLists.txt 增加编译,
# Actuators
actuators/esc.cpp
actuators/hardpoint.cpp
actuators/servo.cpp
actuators/tiltmotor.cpp # <-- 新加的
actuators/tiltmotor.hpp # 新加的
2. 使用实例
在 uavcan_main.cpp 中添加测试代码,位于:…\Firmware\src\drivers\uavcan\uavcan_main.cpp
- 包含头文件
#include "tiltmotor.hpp"
- 测试例程
void example_send_tilt()
{
if (!UavcanNode::instance()) {
PX4_ERR("UAVCAN node not started");
return; // 直接退出函数
}
uavcan::INode &node = UavcanNode::instance()->get_node();
TiltMotorController tilt(node);
tilt.init();
// 循环发送几次
for (int i = 0; i < 5; i++) {
tilt.send_fixed_command(1, 1000); // motor_id=1, angle_data=1000
// tilt.send_fixed_command(2, 2000); // motor_id=2, angle_data=2000
PX4_INFO("TiltMotor commands sent %d/5", i+1);
px4_usleep(1000000); // 1秒
}
}
- 使用方法
extern "C" __EXPORT int uavcan_main(int argc, char *argv[])
{
if (argc < 2) {
print_usage();
::exit(1);
}
if (!std::strcmp(argv[1], "start")) {
if (UavcanNode::instance()) {
// Already running, no error
PX4_INFO("already started");
::exit(0);
}
// Node ID
int32_t node_id = 1;
(void)param_get(param_find("UAVCAN_NODE_ID"), &node_id);
if (node_id < 0 || node_id > uavcan::NodeID::Max || !uavcan::NodeID(node_id).isUnicast()) {
PX4_ERR("Invalid Node ID %" PRId32, node_id);
::exit(1);
}
// CAN bitrate
int32_t bitrate = 1000000;
(void)param_get(param_find("UAVCAN_BITRATE"), &bitrate);
// Start
PX4_INFO("Node ID %" PRIu32 ", bitrate %" PRIu32, node_id, bitrate);
// 启动 UAVCAN
int start_res = UavcanNode::start(node_id, bitrate);
if (start_res == 0) {
// 启动成功,再调用 TiltMotor 测试
PX4_INFO("Starting TiltMotor test...");
example_send_tilt(); // 调用测试函数
}
return start_res;
}
3. 接线与测试
在uavcan_main.cpp中,有以下代码,其中can = new CanInitHelper(board_get_can_interfaces());,其会将系统中所有可用的can接口绑定到同一个 UavcanNode 上,使得两路 CAN 输出的数据完全一致。
UavcanNode::start(uavcan::NodeID node_id, uint32_t bitrate)
{
if (_instance != nullptr) {
PX4_WARN("Already started");
return -1;
}
/*
* CAN driver init
* Note that we instantiate and initialize CanInitHelper only once, because the STM32's bxCAN driver
* shipped with libuavcan does not support deinitialization.
*/
static CanInitHelper *can = nullptr;
if (can == nullptr) {
can = new CanInitHelper(board_get_can_interfaces());
if (can == nullptr) { // We don't have exceptions so bad_alloc cannot be thrown
PX4_ERR("Out of memory");
return -1;
}
...
因此,usb-can模块可接到任意can接口上。

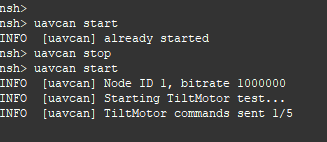
通过Mavlink 控制台,当 uavcan start,can 接口每隔一段时间发送tilt.send_fixed_command(1, 1000); // motor_id=1, angle_data=1000,共发送5次。
uavcan start
uavcan stop
uavcan status
由于uavcan开机自启动,因此,需要先停止,再重新打开
使用CAN上位机,可以拿到数据,但是由于代码的通信协议是CAN,我强制使用UAVCAN输出,因此无法直接控制电机。

总结
本文只是简单在1.13固件上完成了新建一个uavcan消息,并且使用这个消息发送数据的测试例程,无法完成CAN电机的UAVCAN驱动。
目前并未找到很好的在飞控中使用can接口驱动传感器和执行器的方法,已经试过的方案
- 关掉 uavcan ,使用can驱动 , 但不是所有飞控均可以,板子有已经写好的驱动才可以,如 …\Firmware\boards\px4\fmu-v5x\src\can.c
- 一个接口uavcan,另一个接口 can,修改
can = new CanInitHelper(board_get_can_interfaces());为can = new CanInitHelper(1); // 固定使用 CAN1;,确实可以分开can1 和can 2 口。 但是 can2 的初始化无法完成(代码水平有限)。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









