




 ROS是用于机器人的一种后操作系统,提供硬件抽象、驱动管理、消息传递等功能,并支持多种编程语言。其特点在于消息通讯层的设计,分散实时计算压力。基础工具包括各种教程资源,适合机器人开发学习。
ROS是用于机器人的一种后操作系统,提供硬件抽象、驱动管理、消息传递等功能,并支持多种编程语言。其特点在于消息通讯层的设计,分散实时计算压力。基础工具包括各种教程资源,适合机器人开发学习。
什么:robot operating system
架构层次:
用于机器人的一种后操作系统,或者说次级操作系统。它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,它也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。
特点:
ROS的点对点设计以及服务和节点管理器等机制可以分散由计算机视觉和语音识别等功能带来的实时计算压力,能够适应多机器人遇到的挑战。
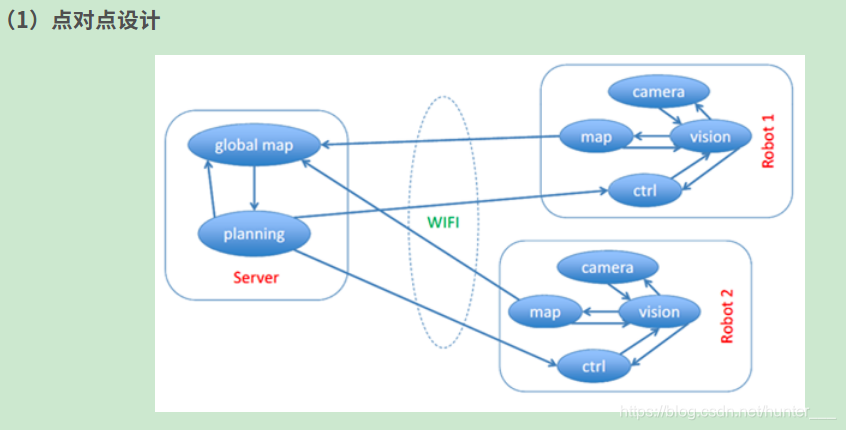
ROS的特殊性主要体现在消息通讯层,而不是更深的层次。端对端的连接和配置利用XML-RPC机制进行实现,XML-RPC也包含了大多数主要语言的合理实现描述。
(2)多语言支持
......
基础工具:
主要参考资料专栏:ROS探索总结
资料啊:
http://wiki.ros.org/cn/ROS/Tutorials
https://blog.youkuaiyun.com/hcx25909/article/details/8811313 ROS探索总结(三)——ROS新手教程
https://blog.youkuaiyun.com/ZhangRelay/article/details/55104019 入门ROS教程与视频汇总(kinetic)
https://blog.youkuaiyun.com/kevin_chan04/article/details/78467237 ROS基础教程
https://blog.youkuaiyun.com/heyijia0327/article/details/42241831 ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









