






文章目录
⏱️ 预计阅读时间:30-35分钟
🎯 学习目标:理解计算机视觉的整体框架,掌握从低层图像处理到高层语义理解,从几何重建到语义识别的完整知识体系
📚 这篇到底想讲清楚什么(先给你一张"路线图")
计算机视觉回答一个根本问题:如何让计算机像人一样"看懂"图像?从像素值到语义理解,从几何结构到场景理解,这是一个多层次的认知过程。
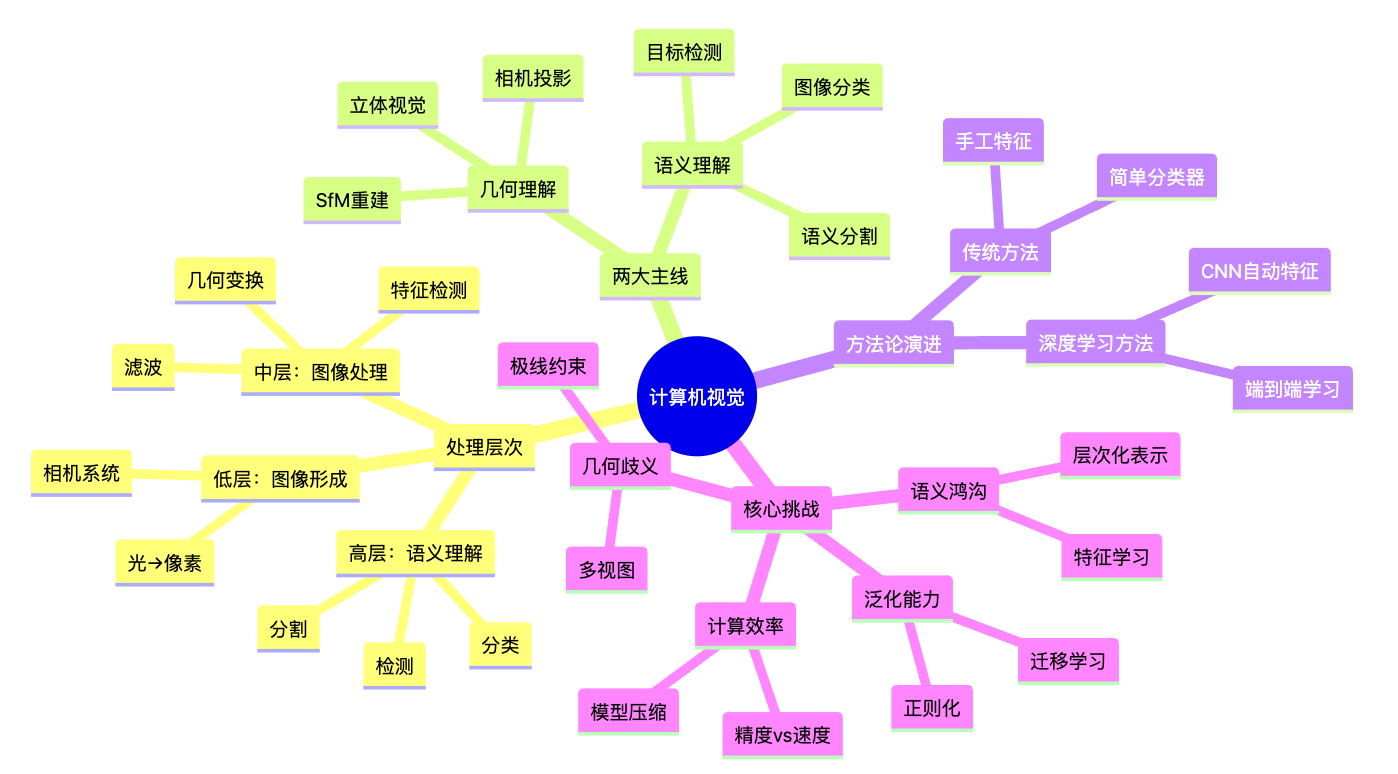
你只需要抓住 4 件事:
- 处理层次:从低层(像素)到中层(特征)到高层(语义)的递进
- 两大主线:几何理解(3D结构)vs 语义理解(识别分类)
- 方法论演进:从手工设计到端到端学习的范式转变
- 核心挑战:语义鸿沟、几何歧义、计算效率的权衡
第一部分:计算机视觉的处理层次——从像素到理解
一、核心问题:图像理解是一个多层次的认知过程
计算机视觉的本质可以用一句话说清楚:从像素值(数字矩阵)到语义理解(“这是一只猫”)是一个多层次的认知过程,每一层都在提取不同抽象程度的信息。
二、低层处理:从光到像素
图像形成回答了最基础的问题:场景中的光如何变成像素中的数字?
核心洞察:
- 像素值是"这个位置收到了多少光"的记录
- 清晰成像需要限制光线方向(针孔/镜头)
- 曝光参数(光圈/快门/ISO)控制亮度,但都有代价
三、中层处理:从像素到特征
图像处理和特征检测提取图像中的结构信息:
核心洞察:
- 几何变换改变像素位置(坐标映射),用于对齐和校正
- 滤波改变像素值(局部邻域操作),用于去噪和增强
- 特征检测找到稳定、可重复的点,用于建立图像对应
四、高层处理:从特征到语义
语义理解将特征映射到语义概念:
核心洞察:
- 语义鸿沟:像素值与语义理解之间的巨大差距
- 需要从数据中学习特征表示,而不是手工设计
- 深度学习通过端到端学习自动提取特征
第二部分:两大主线——几何理解 vs 语义理解
一、核心问题:计算机视觉的两大目标
计算机视觉有两个根本目标:理解几何结构(3D重建)和理解语义内容(识别分类)。这两个目标相互独立又相互补充。
二、几何理解:从2D恢复3D
几何理解关注的是空间结构,回答"在哪里"和"什么形状"的问题。
核心洞察:
- 单视图只能知道3D点位于某条射线上,无法确定距离
- 双视图通过极线约束和三角化可以测量距离
- 多视图通过SfM可以重建完整场景结构
关键挑战:
- 几何歧义:从2D恢复3D存在固有歧义
- 对应问题:需要在多视图间建立点对应
- 优化问题:Bundle Adjustment需要同时优化相机参数和3D点
三、语义理解:从像素到概念
语义理解关注的是内容识别,回答"是什么"的问题。
核心洞察:
- 语义鸿沟:像素值与语义概念之间的巨大差距
- 特征表示是关键:从手工设计(SIFT、HOG)到自动学习(CNN)
- 深度学习通过多层非线性变换学习层次化特征
关键挑战:
- 语义鸿沟:如何从像素值提取语义信息
- 泛化能力:如何学习对变换不变的通用模式
- 计算效率:如何在精度和速度之间权衡
四、两大主线的融合
虽然几何理解和语义理解关注不同层面,但它们可以相互补充:
融合应用:
- 语义SLAM:同时进行3D重建和语义标注
- 增强现实:需要几何对齐和语义理解
- 机器人导航:需要理解空间结构和语义内容
第三部分:方法论演进——从手工特征到端到端学习
一、核心问题:如何从数据中提取有用信息
计算机视觉的方法论经历了从手工设计特征到端到端学习的范式转变。
二、传统方法:手工设计特征
传统方法的核心思想是:先手工设计特征,再用简单分类器分类。
传统方法的优势:
- 可解释性强:特征有明确的物理意义
- 计算效率高:特征维度相对较小
- 适合小数据集:不需要大量训练数据
传统方法的局限:
- 需要专业知识:特征设计依赖领域知识
- 泛化能力有限:手工特征可能不适合新任务
- 表达能力有限:难以捕捉复杂的非线性模式
三、深度学习方法:端到端学习
深度学习方法的核心思想是:让网络自动学习特征表示,端到端优化整个系统。
深度学习的优势:
- 自动学习特征:不需要手工设计
- 层次化表示:从低层到高层逐层抽象
- 端到端优化:整个系统联合优化
- 泛化能力强:在大数据集上训练后可以迁移
深度学习的挑战:
- 需要大量数据:通常需要百万级图像
- 计算资源需求高:需要GPU加速
- 可解释性差:特征表示难以解释
- 训练困难:需要解决梯度消失、过拟合等问题
四、从线性分类器到深度网络
方法论演进反映了对问题复杂度的认识:
关键演进:
- 线性分类器:只能学习线性决策边界,无法处理XOR问题
- 神经网络:通过多层非线性变换学习复杂模式
- CNN:保留图像空间结构,参数共享提高效率
- 深度CNN:通过残差连接、批量归一化等技术训练非常深的网络
XOR:线性不可分的核心特征
x₂(第二个输入)
|
1 | ● 红(0,1)=1 ○ 蓝(1,1)=0
|
0 | ○ 蓝(0,0)=0 ● 红(1,0)=1
|______________________
0 1 x₁(第一个输入)
🔍 关键说明:
• 蓝色○:输出为0的点 (0,0)、(1,1)
• 红色●:输出为1的点 (0,1)、(1,0)
• 👉 无法画一条直线把○和●完全分开
• 这就是「线性不可分」的核心特征
五、训练深层网络的关键技术
训练深层网络需要解决多个问题:
关键技术:
- 激活函数:ReLU保证梯度流动,避免梯度消失
- 批量归一化:稳定每层输入分布,允许更高学习率
- 残差连接:解决深度网络的退化问题
- 正则化:L2正则化、Dropout、数据增强防止过拟合
- 优化器:Momentum、Adam改进梯度下降效率
第四部分:核心挑战与解决方案
一、语义鸿沟:从像素到语义
语义鸿沟是计算机视觉最根本的挑战:像素值(数字矩阵)与语义理解(“这是一只猫”)之间的巨大差距。
解决方案:
- 特征学习:让网络自动学习从像素到语义的映射
- 层次化表示:从低层(边缘)到中层(纹理)到高层(语义)逐层抽象
- 大规模数据:在百万级图像上学习通用模式
二、几何歧义:从2D恢复3D
几何歧义是几何理解的核心挑战:从2D图像恢复3D结构存在固有歧义。
解决方案:
- 多视图:使用多个视角消除歧义
- 极线约束:将2D搜索降低到1D搜索
- 特征匹配:SIFT等不变特征建立对应
- RANSAC:去除误匹配
- Bundle Adjustment:联合优化相机参数和3D点
三、计算效率:精度与速度的权衡
计算效率是实际应用的关键:如何在精度和速度之间找到平衡。
解决方案:
- 模型压缩:剪枝、量化减少模型大小
- 知识蒸馏:用大模型指导小模型
- 硬件加速:GPU、TPU、专用芯片
- 算法优化:单阶段检测器(YOLO)vs 两阶段检测器(R-CNN)
四、泛化能力:从训练数据到新场景
泛化能力是模型成功的关键:如何让模型在新场景、新数据上表现良好。
解决方案:
- 正则化:L2正则化、Dropout防止过拟合
- 数据增强:通过变换增加数据多样性
- 迁移学习:在大数据集上预训练,在小数据集上微调
- 域适应:适应不同数据分布
📝 本章总结(Summary)
核心要点
-
处理层次:计算机视觉是一个从低层(像素)到中层(特征)到高层(语义)的递进过程,每一层提取不同抽象程度的信息
-
两大主线:几何理解关注3D结构重建,语义理解关注内容识别分类,两者相互独立又相互补充
-
方法论演进:从手工设计特征到端到端学习的范式转变,深度学习通过自动学习特征和层次化表示解决了语义鸿沟问题
-
核心挑战:语义鸿沟、几何歧义、计算效率、泛化能力是计算机视觉的核心挑战,需要综合运用多种技术解决
附:知识体系全景图
从低层到高层的完整流程
传统方法 vs 深度学习方法
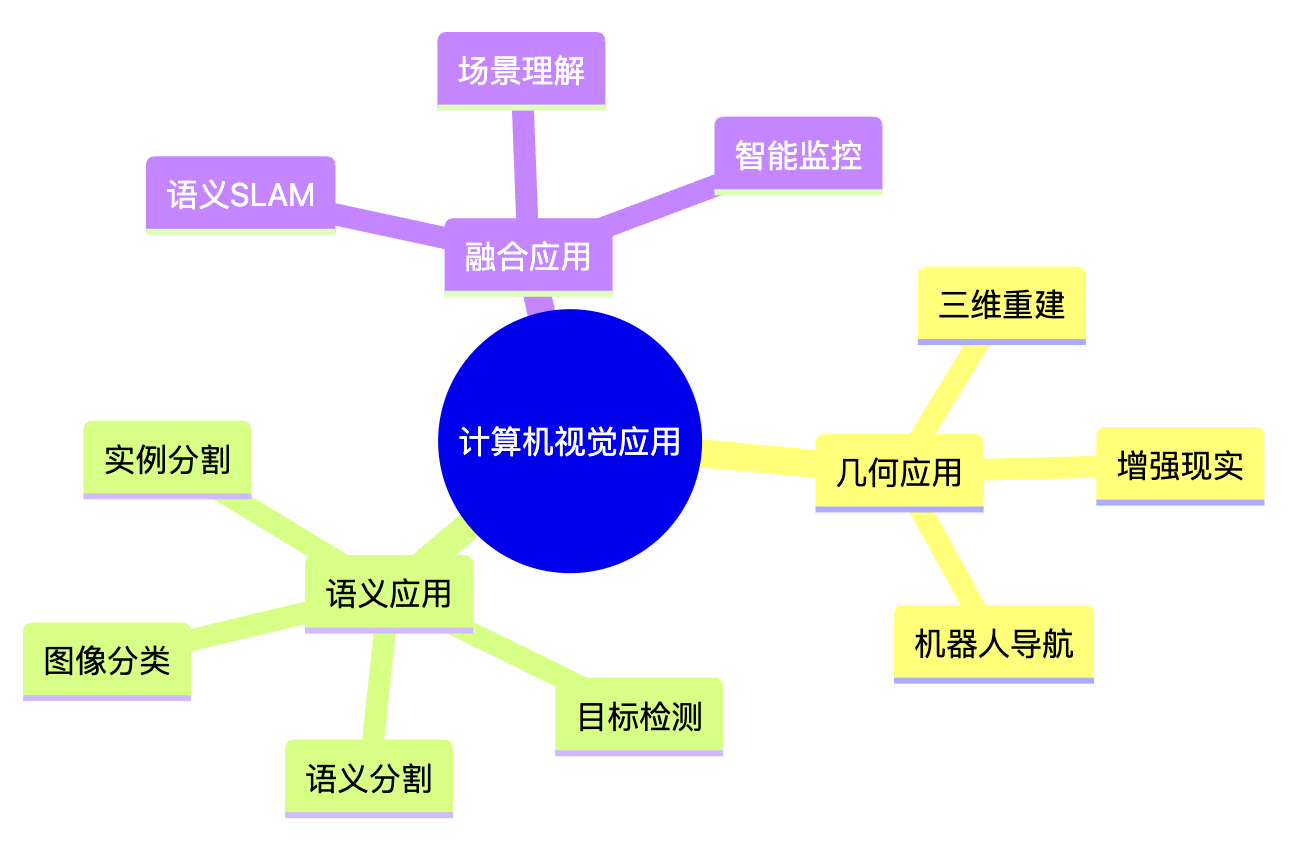
应用领域全景
mindmap
root((计算机视觉应用))
几何应用
三维重建
增强现实
机器人导航
语义应用
图像分类
目标检测
语义分割
实例分割
融合应用
语义SLAM
场景理解
智能监控
附:术语小词典(Glossary)
语义鸿沟(Semantic Gap)
像素值(数字矩阵)与语义理解(如"猫"、“狗”)之间的巨大差距。这是计算机视觉最根本的挑战,需要通过特征学习来桥接。
几何理解(Geometric Understanding)
关注空间结构和3D重建的计算机视觉任务,回答"在哪里"和"什么形状"的问题。包括相机投影、立体视觉、SfM等。
语义理解(Semantic Understanding)
关注内容识别和分类的计算机视觉任务,回答"是什么"的问题。包括图像分类、目标检测、语义分割等。
端到端学习(End-to-End Learning)
让网络自动学习从输入到输出的完整映射,整个系统联合优化。与传统方法的手工设计特征不同,深度学习通过端到端学习自动提取特征。
层次化表示(Hierarchical Representation)
从低层(边缘、纹理)到中层(局部模式)到高层(语义概念)逐层抽象的特征表示。CNN通过多层卷积自动学习层次化表示。
迁移学习(Transfer Learning)
在大数据集上预训练模型,然后在小数据集上微调。这允许模型利用大规模数据学习通用特征,然后适应特定任务。
域适应(Domain Adaptation)
让模型适应不同数据分布的技术。例如,在合成数据上训练的模型适应真实数据,或在一种场景下训练的模型适应另一种场景。



















 174
174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











