






CloudFabric是华为推出的数据中心网络SDN解决方案,该方案由华为数据中心旗舰级核心交换机CloudEngine 16800/12800系列、高性能的盒式交换机CloudEngine 9800/8800/7800/6800/5800系列,配合华为数据中心控制器iMaster NCE-Fabric、智能网络分析平台iMaster NCE-FabricInsight以及安全解决方案HiSec,为客户提供覆盖数据中心网络的“规划建设 → 业务发放 → 运维监控 → 变更优化”全生命周期的极简运营体验;对网络故障实现发现、分析、隔离的智能闭环;同时CloudFabric还能满足数据中心全以太网络演进,可融合计算专网与存储专网,实现以太零丢包,提升计算和存储性能。
我们为什么需要CloudFabric
数据中心网络作为ICT关键的基础设施,在数字化转型过程中, 大量新型产业和新ICT技术的不断涌现,对传统数据中心提出新的要求。
-
业务快速上线,网络需要池化与自动化
业务种类繁多,策略各异,传统数据中心业务部署工作量大,效率低。 -
IT领域的变革,驱动数据中心网络全以太化演进
① IT架构由集中式转变为分布式,大规模节点之间的互联使用以太网。
② 计算单元直接出以太口,配合RoCE来提供CPU/GPU的以太互联,提升算力。
③ 存储介质从机械硬盘向全闪存升级,存储节点内部采用NVMe,对外采用大带宽的RoCE网络互联。
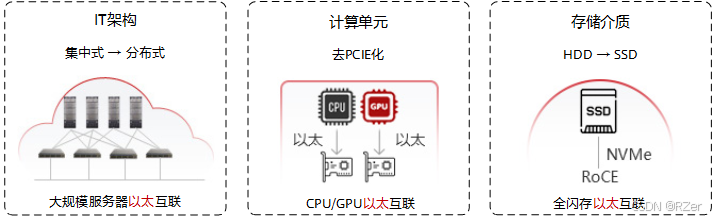
IT领域的变革驱动数据中心网络全以太化演进
- 数据中心正在向全以太网演进,但是传统以太网因为丢包、时延大等,无法满足上述要求。
应用动态随迁,流量激增,数据中心运维需要智能化
随着数据中心规模的扩大、业务策略复杂,以及各种虚拟化技术、云化技术交织使用,使运维难度大大提升,传统的运维经验难以应付。
基于如上场景和需求,华为公司推出了CloudFabric超融合数据中心网络解决方案:
- 实现网络业务的全生命周期自动化,业务TTM(Time to Market,上市时间)效率提升90%。
- 实现全无损以太网络,满足高性能计算零丢包的要求;实现网络长距传输零丢包,满足同城双活全以太存储网络的要求。
- 实现故障的快速感知、智能分析和快速闭环,还可实现大量故障场景的主动故障预测。
CloudFabric有哪些好处
全生命周期自动化,实现网络即服务,业务秒级发放
当前,很多数据中心网络已通过SDN实现了网络配置的自动化。但是业务设计规划、技术评审、效果验证等都需要人工执行,涉及多个部门多个角色,整体耗时长、效率低,成为业务发放的瓶颈。
CloudFabric解决方案通过引入智能算法:
- 在设计环节:将全网影响设计的因素分解到资源、质量、可靠性三个评估维度,实现网络方案的秒级生成与推荐。
- 在验证环节:将网络拓扑、设备配置、流量信息进行叠加计算,实现全网海量配置的秒级校验。
CloudFabric从而可以在规划建设新数据中心、业务发放、运维监控、变更优化四个阶段,实现网络的全生命周期自动化管控。
构建全以太数据中心网络,释放算力、提升存储性能
CloudFabric解决方案面向高性能计算场景提供了全以太的HPC(High-performance Computing,高性能计算)网络。它基于华为独创的iLosslessTM智能无损交换算法,攻克了以太网40多年的丢包难题,实现了100%吞吐下的零丢包,满足HPC业务所需的极致网络性能,实现规模不变,算力倍增。
CloudFabric解决方案面向存储场景提供双活全以太存储网络。在短距iLosslessTM智能无损交换算法的基础上,提出了iLossless-DCI算法,解决了长距无损丢包的难题。华为的全以太替代FC(Fibre Channel,光纤通道)的方案已经有多个成功商用案例,从32G提升到400GE,带宽提升了10倍,存储的IOPS(Input/output Operations Per Second,每秒进行读写操作的次数)提升87%。
全网智能运维,保证业务7×24小时在线
CloudFabric中,通过Telemetry技术实现网络中多维度数据信息的采集,并依托智能分析平台对全网运维数据进行分析,不仅可实现各类运维数据的可视化,还可提供以下几点关键运维能力。
网络健康评估:基于设备、网络、协议、Overlay、业务,构建了一个多维度的评估体系,结合Telemetry机制,整合网络中的配置数据、表项数据、日志数据、KPI性能数据,实时发现网络中各个层面的问题和风险;检测范围覆盖工作状态异常、网络容量异常、器件亚健康、业务流量交互异常等范围;从而帮助运维人员“看网识网”,直观地呈现全网整体体验质量。
快速定位故障根因:基于知识图谱,可实现对数据中心网络已知故障的1分钟发现、3分钟定位、5分钟修复;也可对一些未知故障进行学习和故障推理,帮助运维人员深度探索未知故障的根因。
业务变更自动保障:通过采集配置变更后的网络数据,建模验证网络实际转发行为是否与用户业务意图一致。用户可以通过验证结果辅助确认变更是否符合预期、是否引入问题等等,并且对于验证失败的意图,可以进一步定位回溯失败原因,从而极大提升网络变更场景下的运维保障效率。同时,也可对重要业务周期性自动进行验证,以保证重要业务的正常可靠运行。
CloudFabric由哪些部件组成
CloudFabric方案架构
华为CloudFabric数据中心网络解决方案的架构如下图所示,分为服务器层、Fabric网络层、资源管理层和应用层。
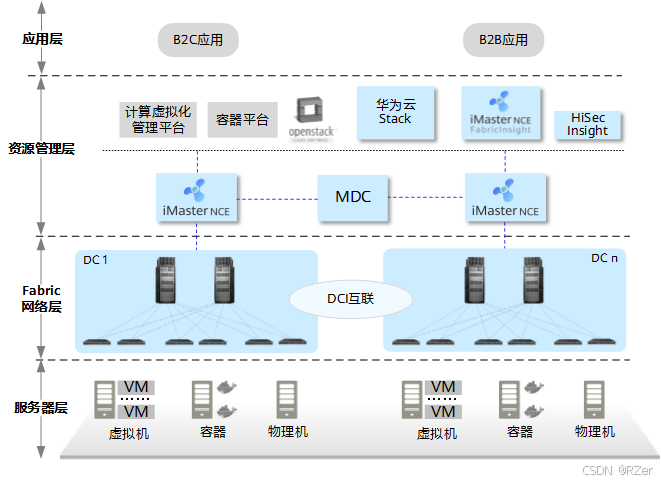
CloudFabric数据中心网络解决方案架构示意图
服务器层
用于承载应用程序的服务器资源,形态上有虚拟机、容器、物理机。这一层的资源并不由CloudFabric解决方案提供。
表1-1 服务器层说明

Fabric网络层
由网络设备如交换机、防火墙、负载均衡器等组成,为服务器提供数据中心内部互联互通的网络服务、为服务器提供访问数据中心外部资源的网络服务。
表1-2 Fabric网络层说明

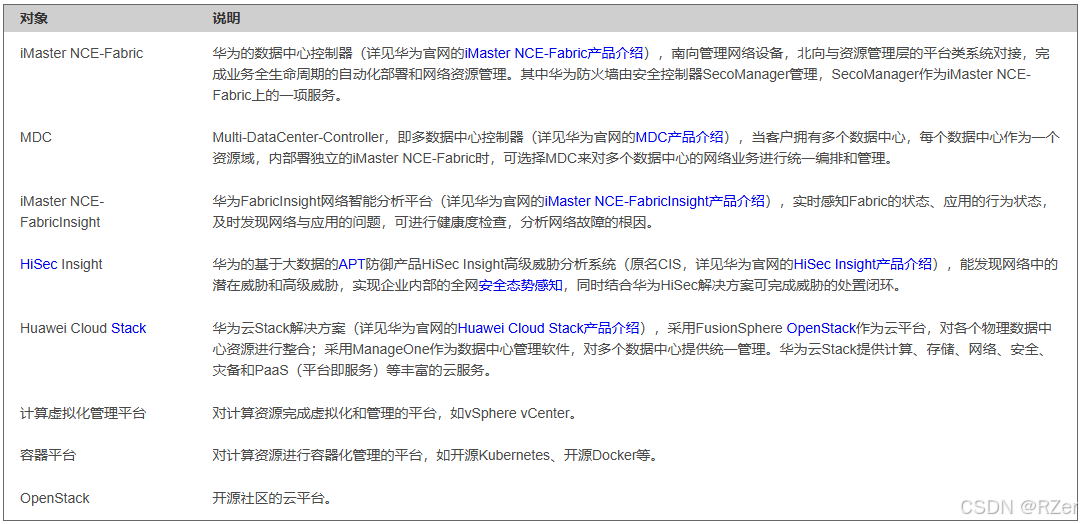
资源管理层
用于将数据中心的存储、计算、网络资源进行抽象,并统一管控。
表1-3 资源管理层说明
应用层
是指CloudFabric为其提供网络服务的各类上层应用,由业务部门管理。常见的B2C业务类似游戏APP、视频APP等;常见的B2B业务类似DCI专线、VPC服务等。
CloudFabric的模型
为了实现用户对业务网络的诉求,在整个CloudFabric解决方案中需要进行业务模型的抽象,同时需要基础物理网络的支撑。如下图所示,CloudFabric的模型分为物理模型、逻辑模型、应用模型,每个模型的说明参见下表。
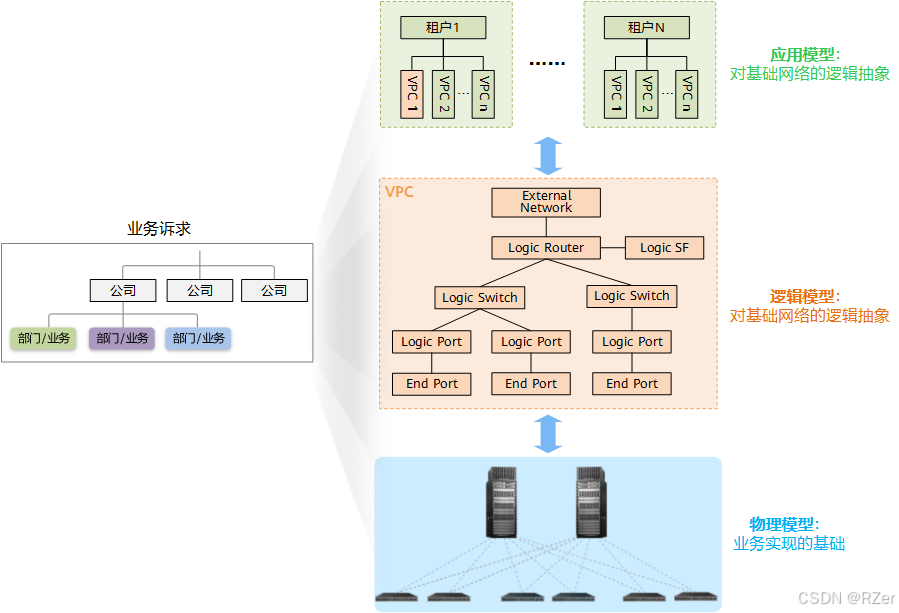
CloudFabric的物理模型、逻辑模型、应用模型
表1-4 CloudFabric的物理模型、逻辑模型、应用模型说明和举例

CloudFabric的运营场景有哪些
在不同的运营场景中,用户的业务管理流程与方式不同。CloudFabric的主要运营场景有云网一体化、计算联动、机架出租,下面分别进行介绍。
云网一体化场景
CloudFabric解决方案中的云网一体化业务场景逻辑示意图如下图所示,由云平台提供存储、计算和网络的统一管理界面,其中网络控制器与云平台对接。
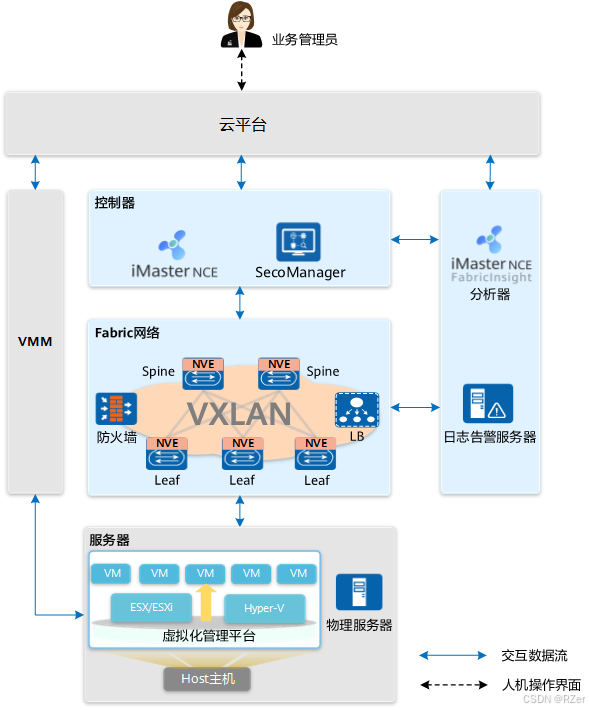
CloudFabric的云网一体化业务场景逻辑示意图
业务管理员通过云平台界面统一创建存储资源、计算资源和网络资源:
- 业务管理员通过云平台将网络资源分配给指定的业务或应用。云平台将业务下发指令传递给网络控制器,再由网络控制器将配置明细自动下发至设备,无需人工配置。
-业务管理员通过云平台进行计算和存储资源的创建、删除和迁移等操作。云平台、网络控制器、网络设备和服务器之间自行进行协调交互,无需人工干预。
计算联动场景
当计算业务管理系统庞杂,或计算管理和网络管理融合度不高又无法构建统一云平台的情况下,适用于计算联动场景。
CloudFabric解决方案中的计算联动场景逻辑示意图如下图所示,控制器对接计算虚拟化平台,不对接云平台,由控制器和计算虚拟平台一同承担业务下发职责,实现计算与网络协同发放。
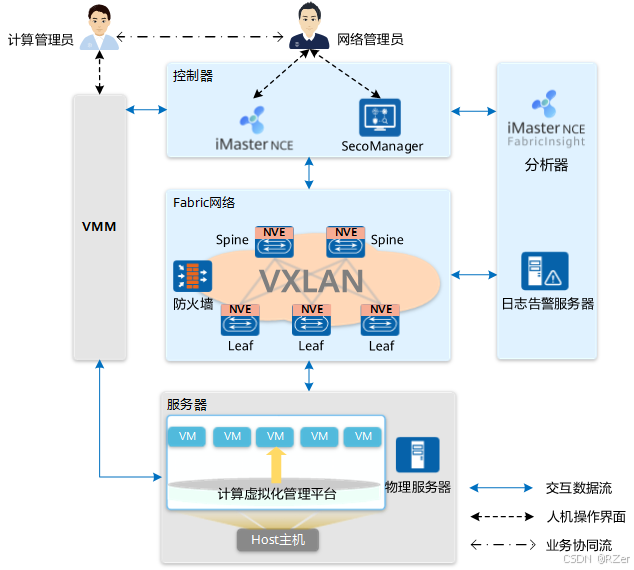
计算联动场景逻辑示意图
业务发放包括以下两个部分:
- 网络业务发放:网络管理员通过控制器编排网络业务,控制器会将网络配置通过接口下发给计算虚拟化管理平台(VMM)。
- 计算业务发放:计算管理员通过VMM进行虚拟机的创建、删除和迁移等操作时,VMM将虚拟机上线、下线等信息通知给控制器,由控制器下发对应接入端口的配置,从而完成端到端业务配置上线。
机架出租场景
机架出租从字面上理解是将机架资源出租给用户,展开来讲,被出租的资源不只是机架,还有机房、主机,除了物理资源还有安全、负载均衡、公网IP地址、接入带宽等增值服务, 出租方以运营商为主,还有一些专业ISP企业。
CloudFabric解决方案中的机架出租场景的逻辑示意图如下图所示。
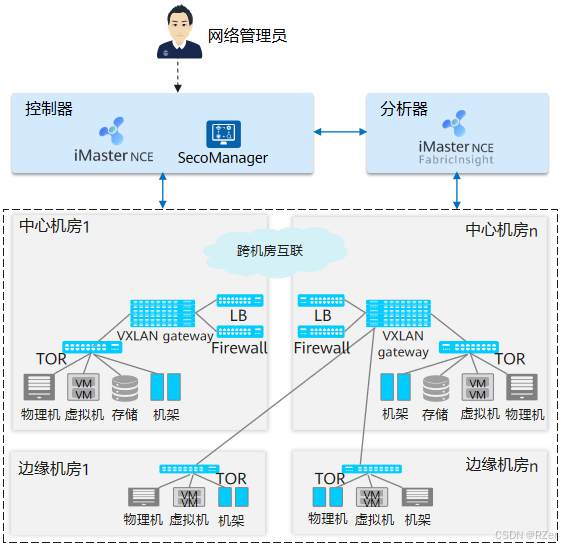
机架出租场景逻辑示意图
本场景中控制器不对接云平台、不对接计算虚拟平台,网络管理员直接使用控制器业务编排页面来控管多个中心机房的网络业务。中心机房可以下联一个或多个边缘机房,实现机房资源的整合与最大化利用。
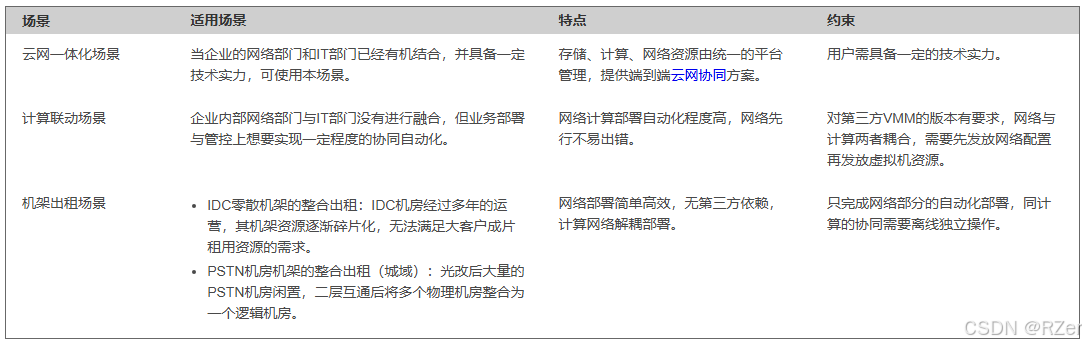
场景间对比
以上三种场景之间的对比参见下表。
表1-5 CloudFabric解决方案中三种场景的对比




















 949
949

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











