







1 外联数据表转内建数据表
最近用低代码平台活字格做项目,想把外联数据表转为内建数据表,但在菜单上只见到“内建数据表转为外联数据表”的按钮,虽然活字格的帮助已经在同行做的很优秀了,但还是没查到,还好在产品支持的帮助下在活字格论坛里找到了方法,但为了网友们方便,还是把它整理出来为好,见下:
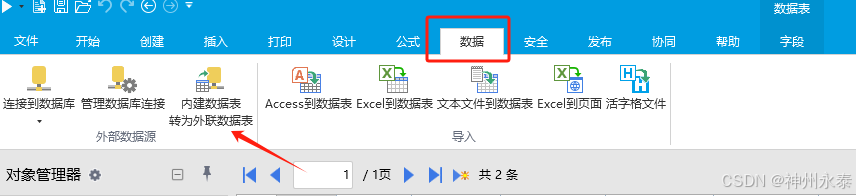
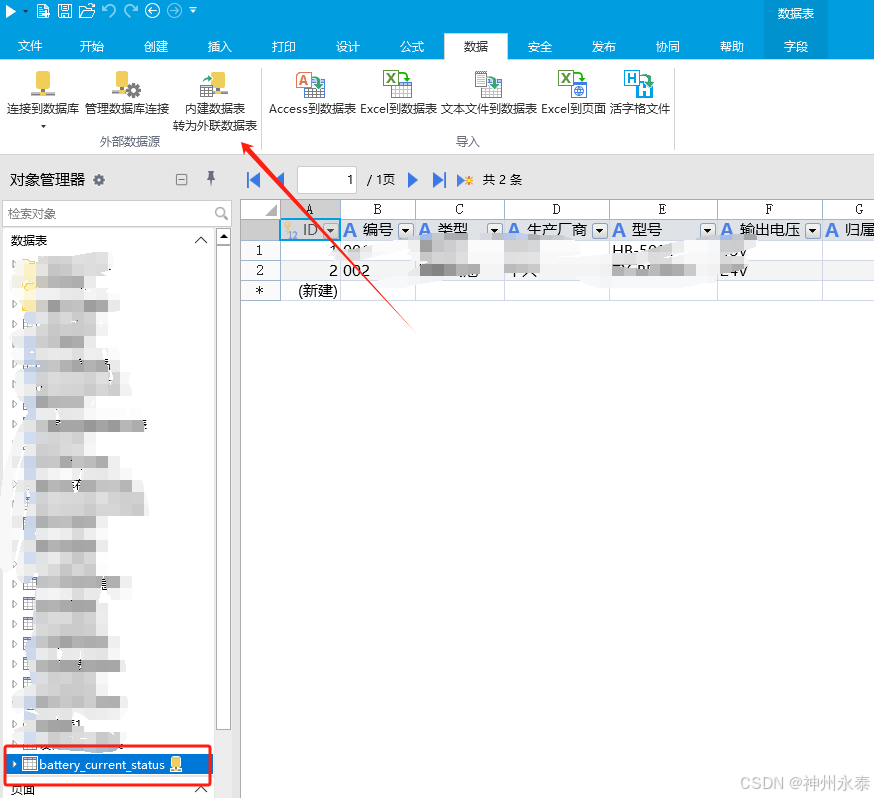
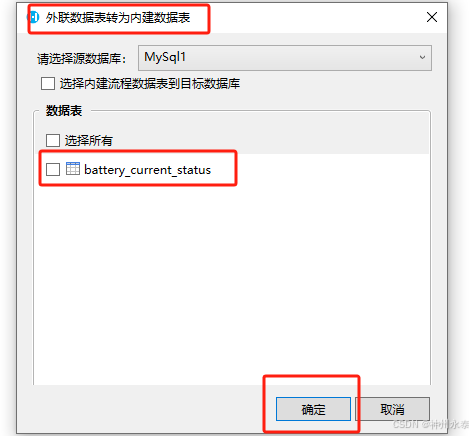
想把外联数据表转为内建数据表,首先需要连接上外联数据表,之后按住CTRL+SHIFT 点这个“内建数据表转为外联数据表”按钮,就会出现下面画面进行转换,点击确定按钮即可,见下面二图:
注:原文链接
https://gcdn.grapecity.com.cn/showtopic-216772-1-1.html
2 如何复制表
目前关于页面只需要鼠标右键就会有复制功能可新生产一个页面,但在表上点右键,却没有复制功能,需要按住CTRL+SHIFT ,再右键才会出现复制按钮。
以上两点,是笔者总结的。
附录:活字格官网
https://www.grapecity.com.cn/


















 491
491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









