




透视矫正不够智能化,每次都要进行局部参数调整,不便于程序使用,程序流程还是那几个步骤;
1、读取图像、灰度化
2、高斯滤波
3、二值化
4、边缘检测
灰度化图

上个图看看经过调整透视矫正边缘检测结果我还是挺满意的
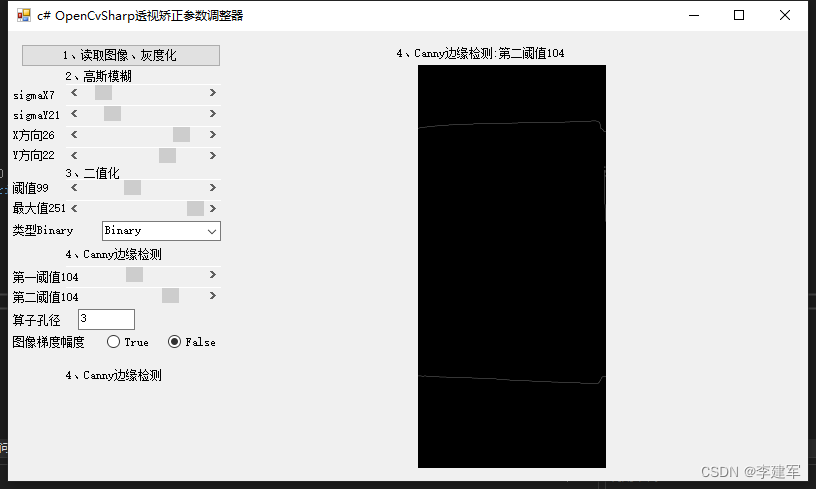
发现一个新问题获取最大面积的四个点有两个点重复在一个位置


一、读取图像、灰度化
固定化格式按部就班
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog dialog = new OpenFileDialog();
dialog.Multiselect = false;//该值确定是否可以选择多个文件
dialog.Title = "请选择文件夹";
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 604
604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









