



👉 这是一个或许对你有用的社群
🐱 一对一交流/面试小册/简历优化/求职解惑,欢迎加入「芋道快速开发平台」知识星球。下面是星球提供的部分资料:
《项目实战(视频)》:从书中学,往事上“练”
《互联网高频面试题》:面朝简历学习,春暖花开
《架构 x 系统设计》:摧枯拉朽,掌控面试高频场景题
《精进 Java 学习指南》:系统学习,互联网主流技术栈
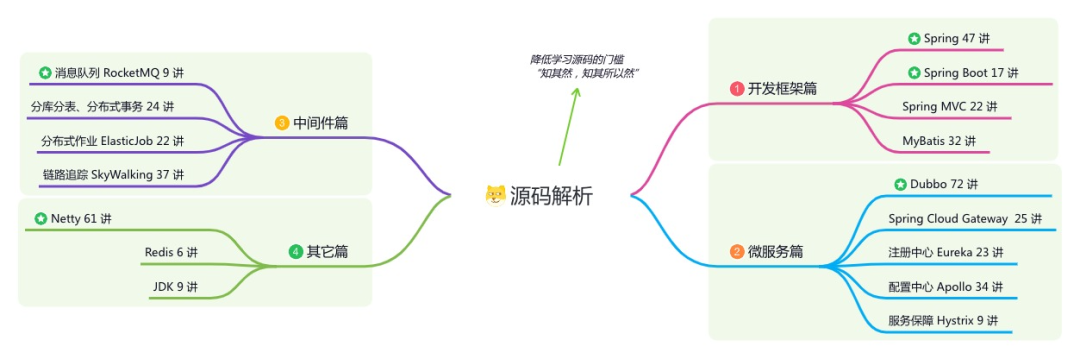
《必读 Java 源码专栏》:知其然,知其所以然
👉这是一个或许对你有用的开源项目
国产 Star 破 10w+ 的开源项目,前端包括管理后台 + 微信小程序,后端支持单体和微服务架构。
功能涵盖 RBAC 权限、SaaS 多租户、数据权限、商城、支付、工作流、大屏报表、微信公众号、CRM 等等功能:
Boot 仓库:https://gitee.com/zhijiantianya/ruoyi-vue-pro
Cloud 仓库:https://gitee.com/zhijiantianya/yudao-cloud
视频教程:https://doc.iocoder.cn
【国内首批】支持 JDK 21 + SpringBoot 3.2.2、JDK 8 + Spring Boot 2.7.18 双版本

免责声明~
任何文章不要过度深思!
万事万物都经不起审视,因为世上没有同样的成长环境,也没有同样的认知水平,更「没有适用于所有人的解决方案」 ;
不要急着评判文章列出的观点,只需代入其中,适度审视一番自己即可,能「跳脱出来从外人的角度看看现在的自己处在什么样的阶段」才不为俗人 。
怎么想、怎么做,全在乎自己「不断实践中寻找适合自己的大道」
1 内部员工吐露
每天工作其实就是负责自己片区的红绿灯,一大早就去校对时间,然后发布到后台。是的,统计出来的,而且还是人工统计,有误差请见谅
真的是很辛苦了!不过还是希望他们记录的时候好好记,因为有的路口真的不准!
基于 Spring Boot + MyBatis Plus + Vue & Element 实现的后台管理系统 + 用户小程序,支持 RBAC 动态权限、多租户、数据权限、工作流、三方登录、支付、短信、商城等功能
项目地址:https://github.com/YunaiV/ruoyi-vue-pro
视频教程:https://doc.iocoder.cn/video/
2 真正的内幕
99% 算法 + 1%交管数据合作接入。
不要怀疑算法的边界,不仅红绿灯推测上了,现在还上了建议时速的绿波带通过功能。
大数据让出行更美好,接下来也会让出行更安全!
其中称红绿灯倒计时及等待轮数都是计算得到的:
有用户点评:“这是什么黑科技?高德是怎么知道前面路口红灯还有多少时长的?”也有观点认为,高德地图接入了所在城市红绿灯的数据,因此实现了红灯计时读秒的功能。事实上,红绿灯倒计时功能的落地,并非接入现实中的红绿灯数据那般直接简单,而是高德地图多年来在交通领域深耕创新,算力进化的成果——用户在高德地图中看到的红灯倒计时,以及红灯等待轮数,都是“算”出来的结果。
好奇去检索了一下专利,还真找到了:
CN114463969A 红绿灯周期时长的挖掘方法、电子设备及计算机程序产品 高德软件公司
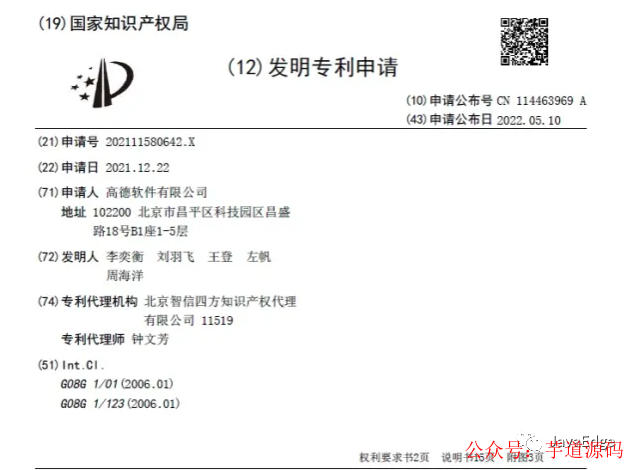
粗略阅读后,感觉确实可以通过此算法确定红绿灯的周期 ,那么实现红绿灯倒计时还需要确定当前时刻距一个红绿灯周期开始的时间,这个问题或许可以利用开启导航车辆的实时启停信息实现?
欢迎加入我的知识星球,全面提升技术能力。
👉 加入方式,“长按”或“扫描”下方二维码噢:

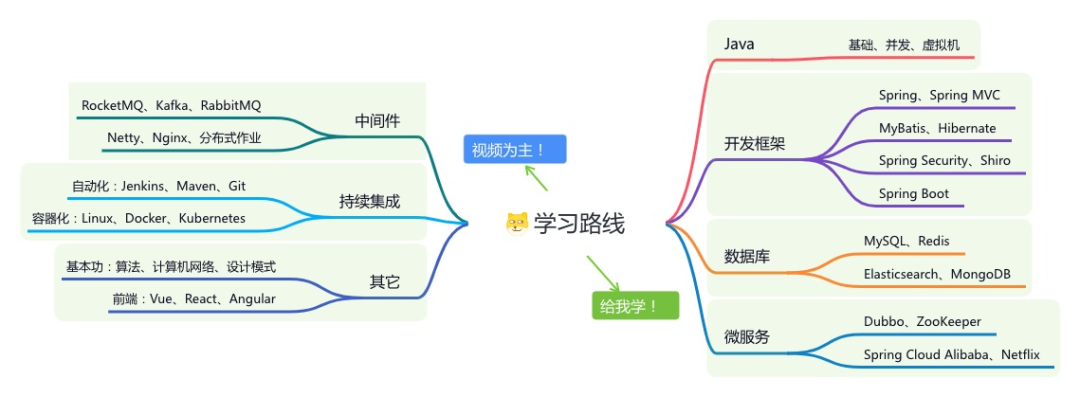
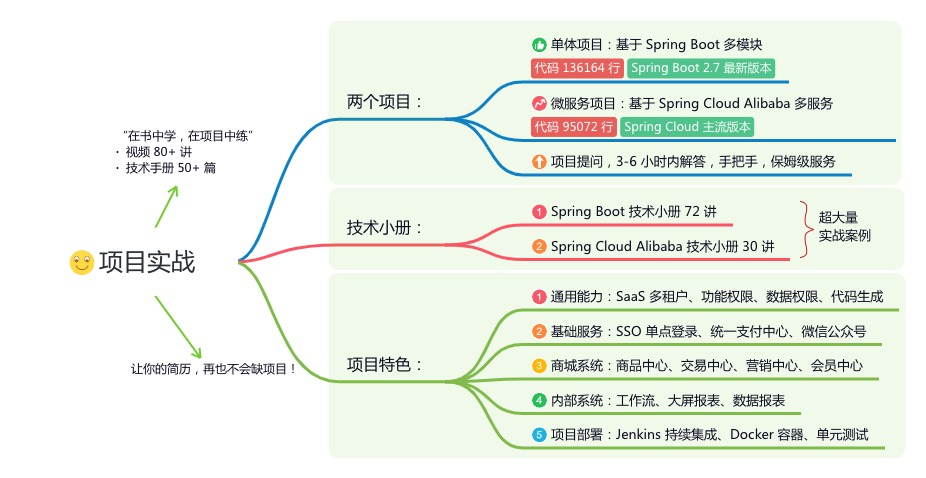
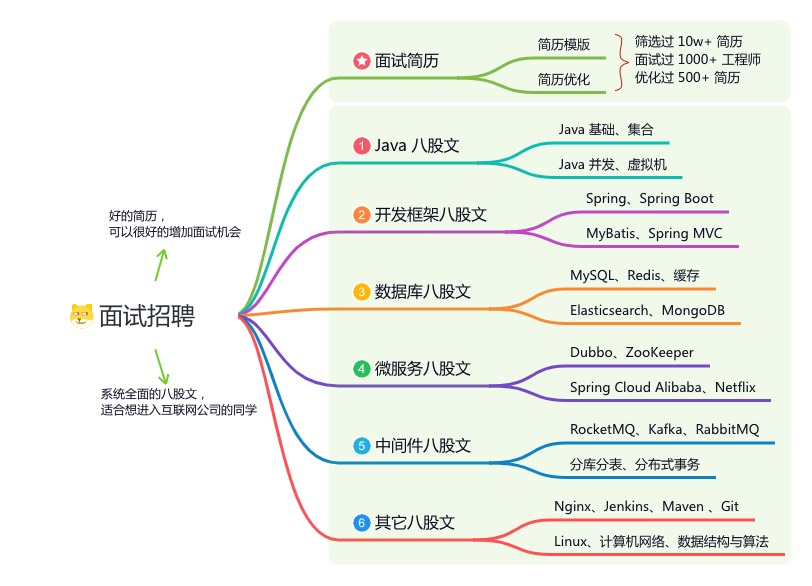
星球的内容包括:项目实战、面试招聘、源码解析、学习路线。
文章有帮助的话,在看,转发吧。
谢谢支持哟 (*^__^*)
















 4786
4786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









