2025无人机开发效率革命:用VS Code打造一站式飞控开发环境
 项目地址: https://gitcode.com/gh_mirrors/aw/awesome-vscode
项目地址: https://gitcode.com/gh_mirrors/aw/awesome-vscode 你还在为无人机开发时频繁切换编辑器、调试工具和代码库而头疼吗?本文将带你构建一套基于Visual Studio Code(VS Code)的无人机开发全流程解决方案,从代码编写、硬件调试到飞行日志分析,让你用一套工具搞定所有环节。读完本文,你将获得:
- 精选5款无人机开发必备VS Code插件清单
- 基于PlatformIO的跨硬件编译调试工作流
- 实时飞行数据可视化与日志分析技巧
- 开源项目完整配置模板与示例代码
无人机开发的工具痛点与解决方案
传统无人机开发面临硬件调试复杂、代码管理混乱、多设备协作困难三大痛点。VS Code通过插件生态系统提供了统一解决方案,其核心优势在于:
- 跨平台兼容性:支持Windows/macOS/Linux系统,适配主流飞控硬件
- 硬件开发集成:通过PlatformIO等插件连接各类开发板
- 代码质量保障:内置Git版本控制与多语言Lint工具
- 自定义工作流:可配置的任务系统与快捷键方案
核心开发工具链配置
开发环境搭建步骤
-
安装基础软件
- VS Code 1.80+
- Git
- Python 3.9+(用于飞行控制算法开发)
-
克隆项目仓库
git clone https://link.gitcode.com/i/9590e3362dbd10023a84c361880bc013 cd awesome-vscode -
安装必备插件 通过VS Code扩展商店安装以下插件:
- Arduino - 硬件开发基础
- PlatformIO - 跨平台物联网开发平台
- Azure IoT Toolkit - 设备管理与数据可视化
- C/C++ - 飞控固件开发支持
- Python - 数据分析与地面站开发
PlatformIO飞控开发实战
PlatformIO是无人机开发的核心工具,支持主流飞控硬件如Pixhawk、Arduino Due、ESP32等。其主要功能包括:
- 统一项目管理
- 多平台编译系统
- 硬件调试支持
- 库依赖管理
快速开始配置:
- 安装PlatformIO插件后重启VS Code
- 创建新项目:选择"File > New > PlatformIO Project"
- 选择开发板(如"Espressif ESP32 Dev Module")
- 等待项目初始化完成
基础飞行控制代码示例:
#include <Arduino.h>
#include <Servo.h>
// 定义电机引脚
#define MOTOR1 5
#define MOTOR2 6
#define MOTOR3 7
#define MOTOR4 8
Servo motors[4];
void setup() {
// 初始化串口通信
Serial.begin(115200);
// 初始化电机
motors[0].attach(MOTOR1);
motors[1].attach(MOTOR2);
motors[2].attach(MOTOR3);
motors[3].attach(MOTOR4);
// 电机自检
for (int i = 0; i < 4; i++) {
motors[i].write(1000); // 最小油门
delay(500);
motors[i].write(1500); // 中位油门
delay(500);
}
}
void loop() {
// 读取遥控器数据
if (Serial.available() > 0) {
String data = Serial.readStringUntil('\n');
// 解析飞行控制指令
// ...
// 控制电机
for (int i = 0; i < 4; i++) {
motors[i].write(1500); // 保持悬停
}
}
}
代码调试与硬件连接
无人机调试工具链
VS Code提供完整的调试体验,通过以下步骤配置无人机调试环境:
- 安装C/C++调试插件
- 创建调试配置文件(.vscode/launch.json)
- 连接飞控板并选择对应端口
- 设置断点并启动调试会话
调试配置示例:
{
"version": "0.2.0",
"configurations": [
{
"name": "无人机调试",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/.pio/build/esp32dev/firmware.elf",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"miDebuggerPath": "xtensa-esp32-elf-gdb",
"setupCommands": [
{
"description": "为 gdb 启用整齐打印",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "PlatformIO: Build"
}
]
}
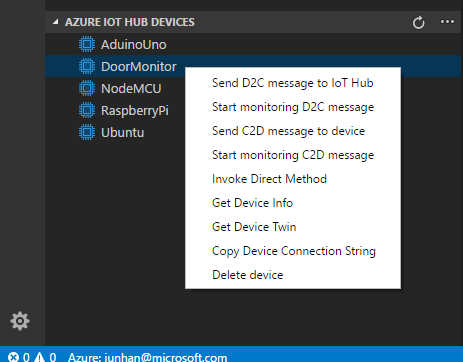
Azure IoT Toolkit数据可视化
Azure IoT Toolkit插件可帮助开发者连接无人机并可视化飞行数据:
- 安装Azure IoT Toolkit插件
- 创建IoT Hub并注册设备
- 使用插件发送和接收无人机数据
- 通过内置仪表板监控关键飞行参数
项目实战:基于ESP32的迷你无人机
硬件准备
- ESP32开发板 ×1
- MPU6050陀螺仪模块 ×1
- 微型电机(720空心杯)×4
- 电机驱动板(如TB6612FNG)×1
- 锂电池(3.7V 500mAh)×1
- 杜邦线若干
软件架构
无人机项目基本结构:
drone-project/
├── include/ # 头文件目录
│ ├── motor.h # 电机控制
│ ├── sensor.h # 传感器读取
│ └── pid.h # 控制算法
├── src/ # 源代码目录
│ ├── main.cpp # 主程序
│ ├── motor.cpp
│ ├── sensor.cpp
│ └── pid.cpp
├── lib/ # 第三方库
├── platformio.ini # 项目配置
└── .vscode/ # VS Code配置
├── launch.json # 调试配置
└── settings.json # 编辑器设置
platformio.ini配置示例:
[env:esp32dev]
platform = espressif32
board = esp32dev
framework = arduino
monitor_speed = 115200
lib_deps =
Wire
adafruit/Adafruit MPU6050@^2.1.0
madhephaestus/ESP32Servo@^1.1.2
关键代码实现
传感器数据读取(src/sensor.cpp):
#include "sensor.h"
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
void initSensor() {
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
}
void readSensorData(SensorData* data) {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
data->ax = a.acceleration.x;
data->ay = a.acceleration.y;
data->az = a.acceleration.z;
data->gx = g.gyro.x;
data->gy = g.gyro.y;
data->gz = g.gyro.z;
}
PID控制算法(src/pid.cpp):
#include "pid.h"
void PID_Init(PID_HandleTypeDef *pid, float kp, float ki, float kd) {
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->error = 0;
pid->last_error = 0;
pid->integral = 0;
pid->derivative = 0;
}
float PID_Compute(PID_HandleTypeDef *pid, float setpoint, float process_value) {
pid->error = setpoint - process_value;
pid->integral += pid->error * 0.01; // 积分项,假设0.01s采样一次
pid->derivative = (pid->error - pid->last_error) / 0.01; // 微分项
// 限制积分项防止饱和
if (pid->integral > 1000) pid->integral = 1000;
if (pid->integral < -1000) pid->integral = -1000;
pid->last_error = pid->error;
return pid->kp * pid->error + pid->ki * pid->integral + pid->kd * pid->derivative;
}
总结与进阶学习
本文介绍了如何利用VS Code生态系统构建无人机开发环境,重点讲解了PlatformIO、Azure IoT Toolkit等插件的应用,以及基于ESP32的无人机项目实战。通过这种开发方式,可以显著提高无人机开发效率,降低硬件调试难度。
进阶学习路径:
- 学习状态估计算法(如卡尔曼滤波)
- 掌握多传感器数据融合
- 开发地面站控制软件
- 研究自主飞行算法
项目完整代码可从仓库获取:无人机开发模板。建议配合官方文档深入学习各工具使用方法。
点赞+收藏+关注,获取更多无人机开发技巧。下期预告:基于机器学习的无人机自主避障系统。
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







