CarDreamer:在“梦境”中学习驾驶
自动驾驶技术的发展日新月异,CarDreamer 项目以其独特的方式推动了这一进程。以下是对这一项目的详细介绍。
项目介绍
CarDreamer 是一个基于世界模型的强化学习项目,旨在通过模拟交通动态来训练自动驾驶代理。该项目整合了高保真的 CARLA 模拟器与世界模型,使得代理能够在“梦境”中从零开始学习驾驶,掌握超车、右转等复杂操作,并在繁忙交通中避免碰撞。
CarDreamer 提供了可定制的观察性、多模态观察空间和意图共享功能。项目论文对不同输入对代理性能的影响进行了系统分析,并展示了代理在应对挑战时的精湛表现。
项目技术分析
CarDreamer 项目的核心是利用世界模型来模拟交通动态,并通过强化学习训练自动驾驶代理。项目使用了 DreamerV3 代理在内部任务中进行训练,并展示了在不同交通场景中的表现。以下是项目技术的一些关键点:
- 世界模型:利用神经网络模拟器学习复杂的交通动态。
- 多模态观察空间:允许代理从不同角度观察环境,包括鸟瞰图和摄像头视角。
- 意图共享:模拟人类驾驶员使用转向信号传达意图的行为。
项目技术应用场景
CarDreamer 可以应用于多种自动驾驶场景,包括但不限于:
- 城市驾驶任务:如右转、左转、合并车道、超车等。
- 交通信号处理:如交通灯和停车标志。
- 意图共享:在交叉路口等复杂场景中,代理通过共享意图来优化决策。
项目特点
CarDreamer 的主要特点包括:
- 可定制的观察性:允许用户根据需要调整代理的观察范围。
- 多模态观察空间:提供多种视角供代理学习。
- 意图共享功能:允许代理在复杂场景中更好地进行决策。
- 高度集成的开发环境:内置任务演示、模型骨架等,便于用户快速上手。
以下是一些具体的项目特点:
任务演示
CarDreamer 提供了多种内置任务演示,包括右转、左转、合并车道和超车等。这些演示展示了代理在不同场景中的表现,以及意图共享对决策的影响。
| 任务演示 |
| :-------: |
|  |
|  |
|  |
|
意图共享
CarDreamer 中的意图共享功能模拟了人类驾驶员使用转向信号的行为。通过共享意图,代理能够更有效地进行决策,尤其是在交叉路口等复杂场景中。
| 意图共享 |
| :-------: |
| |
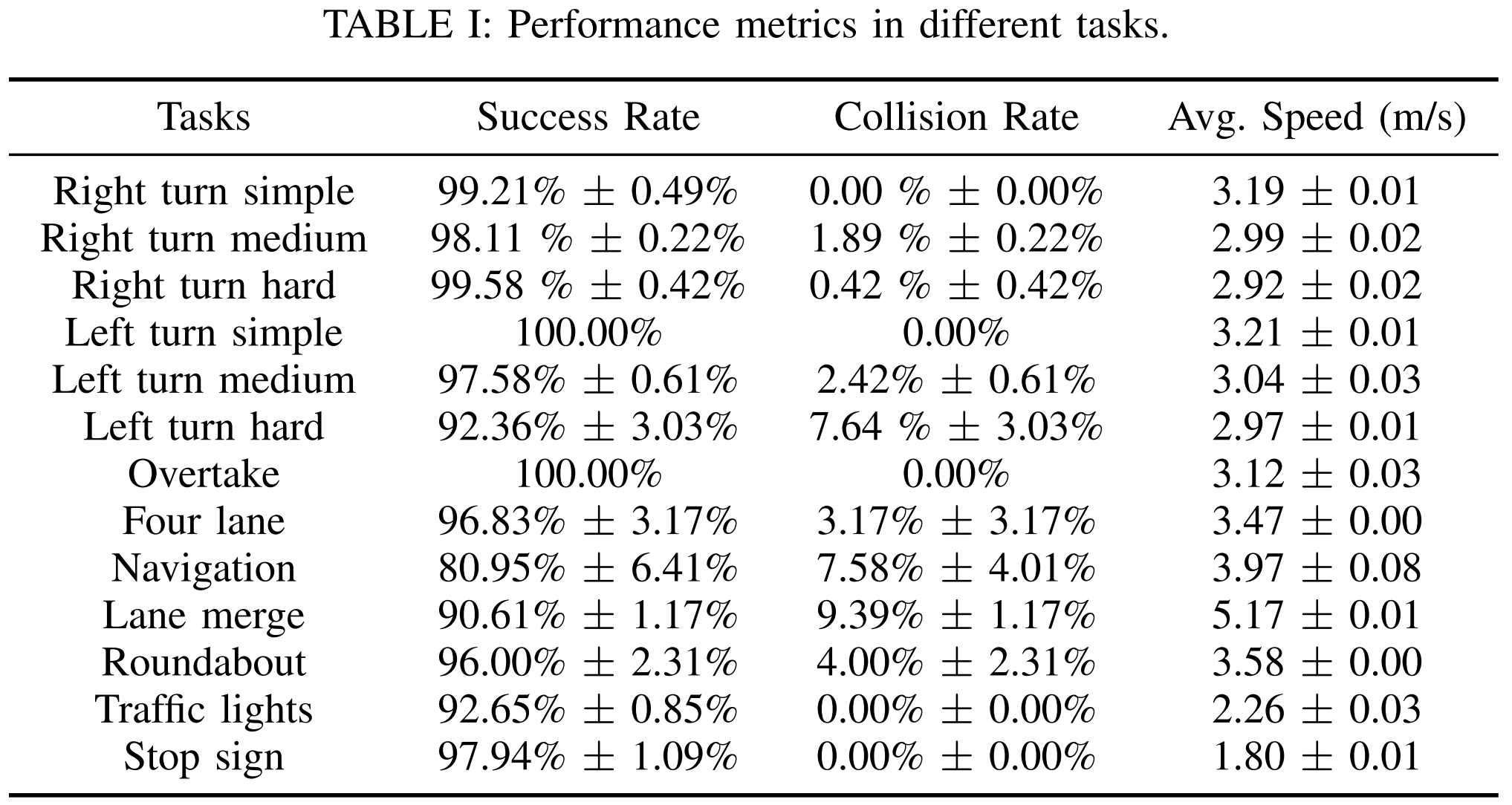
性能指标
CarDreamer 在不同任务中展示了出色的性能指标。以下是一些关键的性能数据:
| 性能指标 |
| :-------: |
|  |
|
结论
CarDreamer 项目以其创新的“梦境”学习方式,为自动驾驶技术的发展开辟了新的道路。通过高度集成的开发环境和多种任务演示,该项目不仅为研究人员提供了强大的工具,也为自动驾驶技术的普及和应用提供了新的视角。对于希望深入了解自动驾驶技术和世界模型应用的开发者来说,CarDreamer 无疑是一个值得尝试的开源项目。
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







