PSMNet立体匹配终极指南:快速实现精准深度估计
 项目地址: https://gitcode.com/gh_mirrors/ps/PSMNet
项目地址: https://gitcode.com/gh_mirrors/ps/PSMNet 立体匹配技术一直是计算机视觉领域的核心挑战之一,特别是在复杂场景中实现精准的深度估计。PSMNet(Pyramid Stereo Matching Network)作为CVPR 2018的突破性成果,通过创新的空间金字塔池化和3D卷积网络,为立体匹配问题提供了全新的解决方案。本指南将带您从零开始,快速掌握PSMNet的安装和使用技巧。
立体匹配的挑战与机遇
在传统的立体视觉系统中,由于遮挡、重复纹理和光照变化等因素,准确计算视差图往往困难重重。PSMNet通过深度学习方法,巧妙地解决了这些长期困扰业界的难题,让深度估计变得更加可靠和高效。
项目核心亮点解析
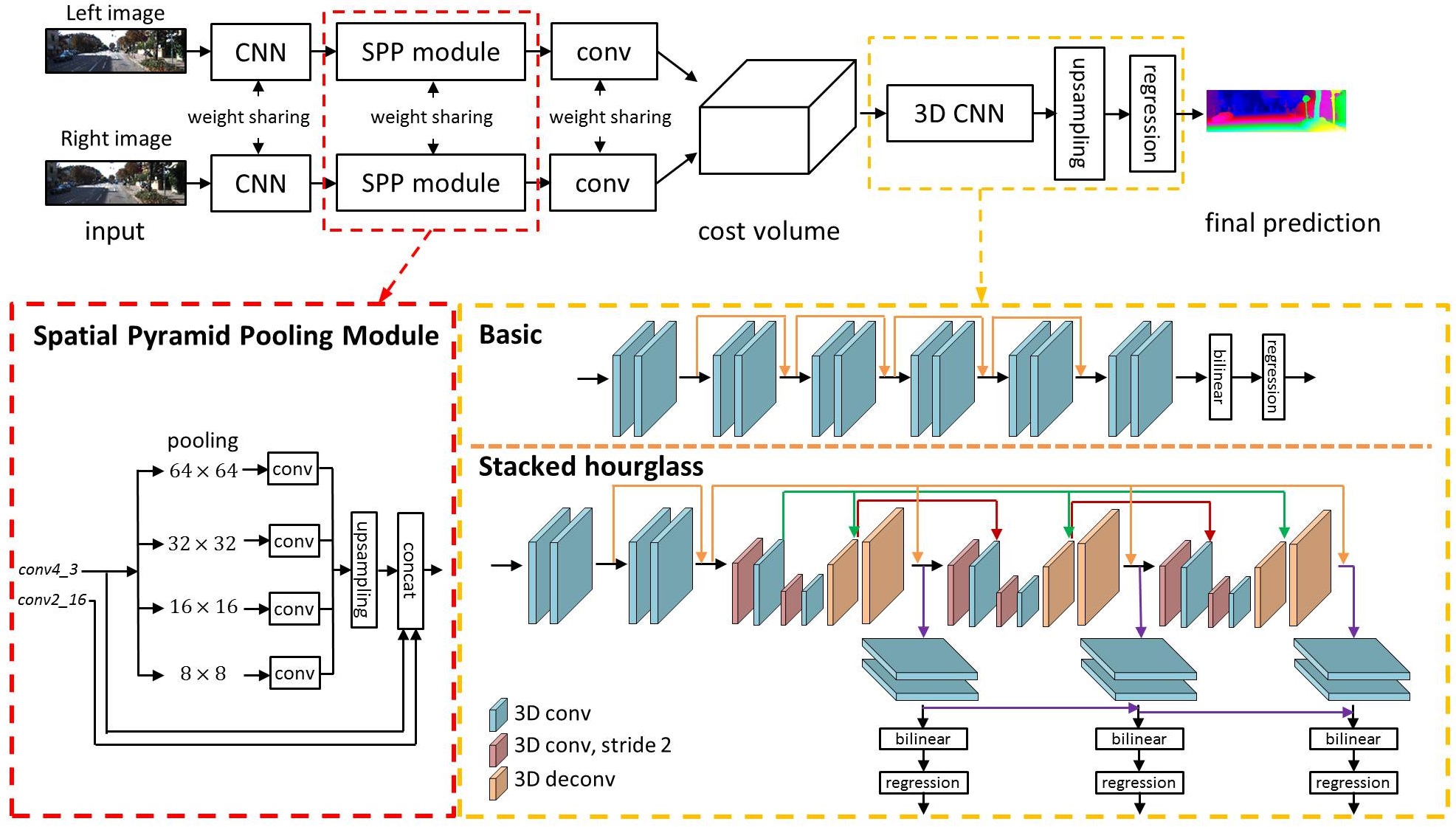
PSMNet采用了双模块设计:空间金字塔池化模块和3D卷积神经网络。这种架构能够有效聚合不同尺度的上下文信息,并通过堆叠的沙漏网络进行正则化处理,显著提升了匹配精度。
快速安装部署指南
环境准备要求
确保您的系统满足以下基础要求:
- Python 3.7或更高版本
- PyTorch 1.6.0+框架
- 支持CUDA的GPU(可选但推荐)
项目获取与配置
git clone https://gitcode.com/gh_mirrors/ps/PSMNet
cd PSMNet
依赖包安装
使用pip安装必要的依赖包:
pip install torch torchvision
实战应用演示
基础训练流程
使用Scene Flow数据集进行基础训练:
python main.py --maxdisp 192 --model stackhourglass --datapath /path/to/data --epochs 10 --savemodel /path/to/save
KITTI数据集微调
针对特定场景进行模型优化:
python finetune.py --maxdisp 192 --model stackhourglass --datatype 2015 --datapath /path/to/kitti --epochs 300 --loadmodel /path/to/pretrained --savemodel /path/to/save
自定义图像测试
使用您自己的立体图像对进行测试:
python Test_img.py --loadmodel /path/to/model --leftimg ./left.png --rightimg ./right.png

进阶配置优化技巧
性能调优建议
- 根据GPU内存调整批处理大小
- 合理设置最大视差参数
- 使用合适的学习率策略
模型选择指导
PSMNet支持多种模型架构,包括stackhourglass和basic模型,您可以根据具体需求选择合适的配置。
常见问题解决方案
环境配置问题
如果遇到PyTorch版本兼容性问题,请确保安装指定版本的依赖包。
数据集处理技巧
在使用KITTI数据集时,注意数据预处理流程,确保左右图像对齐准确。
推理速度优化
通过调整网络参数和优化计算流程,可以在保证精度的前提下显著提升处理速度。
PSMNet作为立体匹配领域的重要里程碑,不仅提供了强大的基础模型,更为后续研究奠定了坚实基础。通过本指南的学习,您已经掌握了PSMNet的核心使用技巧,可以开始在实际项目中应用这一先进技术了。
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







