告别模糊残影:nerfstudio动态物体重建全攻略
 项目地址: https://gitcode.com/GitHub_Trending/ne/nerfstudio
项目地址: https://gitcode.com/GitHub_Trending/ne/nerfstudio 动态场景重建一直是计算机视觉领域的棘手难题,传统NeRF(神经辐射场)在处理运动物体时往往出现模糊、重影甚至结构扭曲。本文将系统解析nerfstudio框架下动态物体重建的核心技术,包括运动补偿机制、时序一致性维护以及多模态数据融合方案,帮助开发者快速掌握高质量动态场景建模的实现方法。
动态重建技术框架
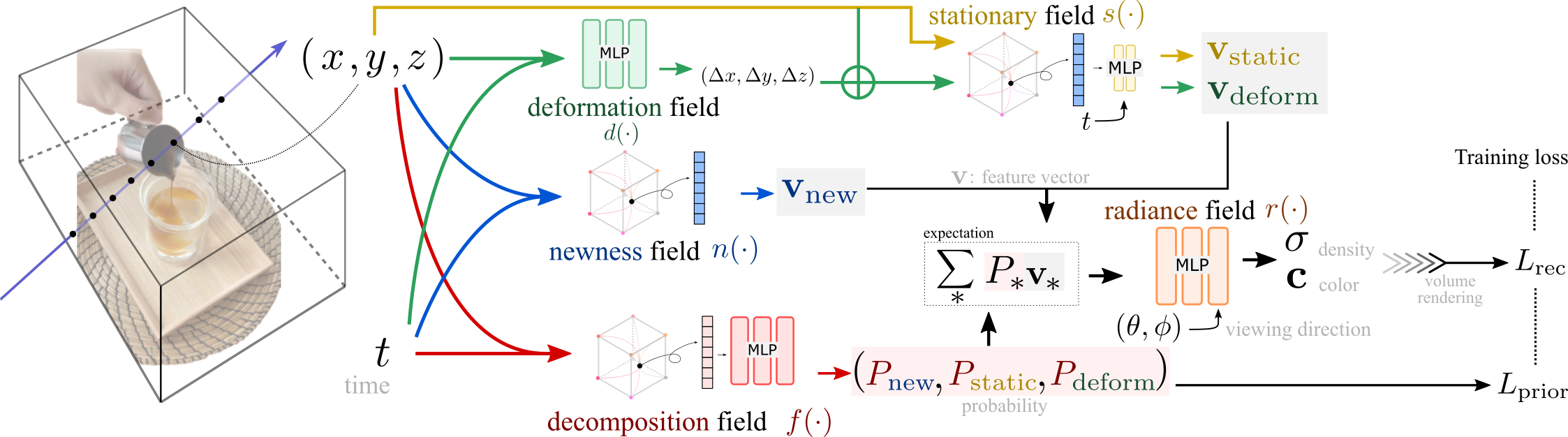
nerfstudio通过模块化设计支持多种动态场景表示方法,其中NeRFPlayer和D-NeRF是两个成熟的解决方案。NeRFPlayer创新性地将4D时空空间分解为静态区域、形变区域和新生区域,每个区域由独立神经场建模并正则化。这种分解策略使模型能够高效处理复杂动态场景,同时保持各区域的特征一致性。
D-NeRF则通过时间嵌入技术将时间维度整合到神经辐射场中,其数据解析器专门处理含时间戳的动态序列。该解析器位于nerfstudio/data/dataparsers/dnerf_dataparser.py,能够从JSON文件中加载带时间信息的相机位姿和图像序列,为动态建模提供基础数据支持。
运动补偿核心实现
运动补偿是动态重建的关键技术,nerfstudio通过多种机制实现对物体运动的精确建模:
- 时空分解网络:NeRFPlayer提供两种骨干网络选择,
nerfplayer-nerfacto基于Nerfacto架构,适合一般动态场景;nerfplayer-ngp则采用Instant-NGP骨干,在保证精度的同时大幅提升训练速度。安装命令如下:
pip install git+https://github.com/lsongx/nerfplayer-nerfstudio.git
-
动态相机跟踪:系统通过nerfstudio/cameras/camera_optimizers.py实现相机位姿的动态优化,即使输入序列存在轻微抖动,也能通过优化得到稳定的相机轨迹,为运动补偿提供准确的参考系。
-
特征流场估计:Splatfacto模型中的高斯混合模型(nerfstudio/models/splatfacto.py)能够捕捉物体表面的细微运动,通过means、scales和quats等参数的动态调整,实现运动物体的精确表征。
时序一致性维护策略
动态场景重建中,时序一致性的维护直接影响最终渲染质量。nerfstudio采用多层次策略确保不同时间戳间的视觉一致性:
-
时间正则化损失:在nerfstudio/model_components/losses.py中实现了多种时序约束损失函数,包括光流一致性损失和形变平滑损失,有效抑制跨帧抖动和闪烁现象。
-
混合表示特征流:NeRFPlayer提出的混合表示特征流方案,结合了体素网格和神经网络的优势。静态区域使用高效的体素表示,动态区域则采用灵活的神经网络建模,在保证效率的同时提升动态细节表现力。
-
渐进式训练策略:Instant-NGP中的多分辨率哈希编码(docs/nerfology/methods/instant_ngp.md)被应用于动态场景建模,通过逐步增加分辨率的方式,使模型先学习全局运动趋势,再细化局部动态细节。
实战流程与最佳实践
使用nerfstudio进行动态物体重建的标准流程包括数据准备、模型训练和结果评估三个阶段:
数据准备
动态场景数据需要包含时间信息的图像序列和相机参数。对于视频数据,可使用以下命令提取帧和相机参数:
ns-process-data video --data ./input_video.mp4 --output-dir ./dynamic_data
对于已有时间戳的图像序列,可直接使用D-NeRF数据解析器,配置文件位于nerfstudio/data/dataparsers/dnerf_dataparser.py。
模型训练
根据场景复杂度选择合适的动态模型:
- 快速预览:
ns-train nerfplayer-ngp --data ./dynamic_data - 高质量重建:
ns-train nerfplayer-nerfacto --data ./dynamic_data --pipeline.model.time-regularization-weight 0.1
训练过程中可通过Viewer实时监控动态效果,调整时间正则化权重等参数以获得最佳时序一致性。
结果评估与优化
使用docs/quickstart/export_geometry.md中的方法导出动态网格序列,通过以下指标评估重建质量:
- 结构相似性指数(SSIM):跨帧结构一致性
- 光流误差:运动轨迹精度
- 三维点云重合度:动态物体几何精度
对于运动模糊严重的场景,可结合nerfstudio/process_data/video_to_nerfstudio_dataset.py中的运动去模糊预处理模块,提升输入序列质量。
常见问题与解决方案
| 问题现象 | 可能原因 | 解决方法 |
|---|---|---|
| 动态物体边缘重影 | 时序一致性损失权重不足 | 增大--pipeline.model.time-regularization-weight |
| 运动过快导致建模失败 | 时间采样密度不足 | 增加训练迭代次数或使用更高帧率数据 |
| 静态背景抖动 | 相机位姿优化不足 | 启用相机优化器--pipeline.camera-optimizer.mode optimize |
| 训练速度过慢 | 动态区域划分不合理 | 调整区域分类阈值--pipeline.model.region-threshold |
通过合理配置这些参数,大多数动态重建问题都能得到有效解决。进阶用户可参考docs/developer_guides/new_methods.md开发自定义动态建模组件,进一步提升特定场景的重建质量。
动态场景重建技术正快速发展,nerfstudio作为开源协作平台,持续整合最新研究成果。开发者可通过社区贡献不断拓展动态建模能力,探索更复杂场景的重建可能性。
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







