探索未来驾驶:MonoCon——助力单目3D物体检测的新突破
项目简介
MonoCon 是一项创新性的研究项目,由Xianpeng Liu、Nan Xue和Tianfu Wu共同提出并实现。该开源项目提供了一个官方的论文《利用辅助单目上下文帮助单目3D物体检测》('Learning Auxiliary Monocular Contexts Helps Monocular 3D Object Detection')的实现,并包含了对优秀工作MonoDLE的非官方实现。该项目旨在通过学习“单目上下文”,即在训练中作为辅助任务的2D监督信号,以提升单目3D物体检测的准确性和速度。
技术分析
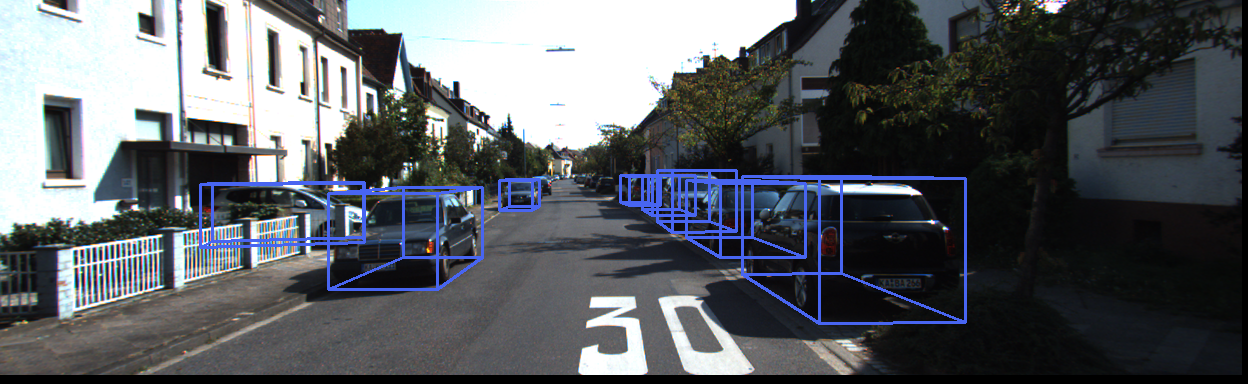
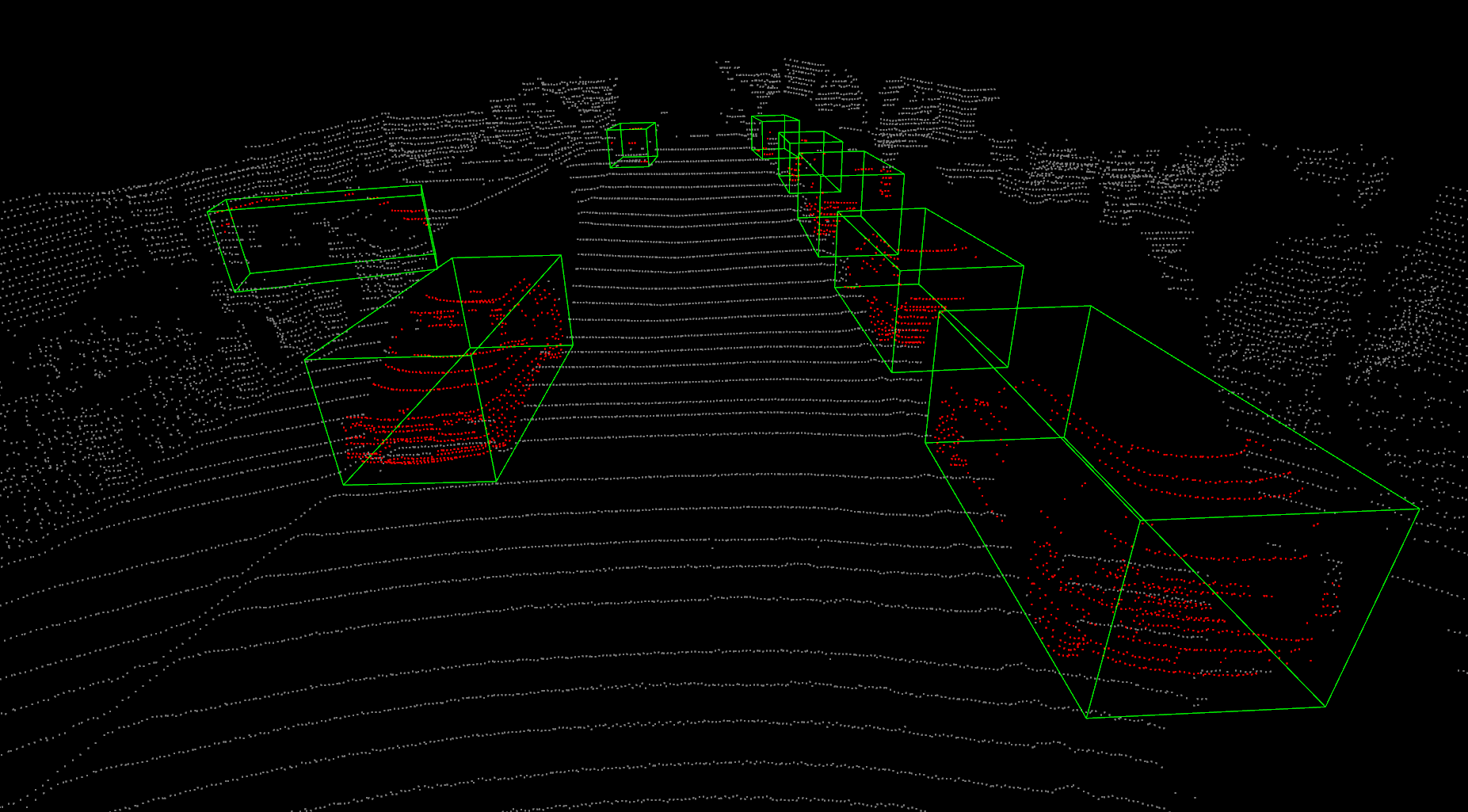
MonoCon 的核心思想是利用Cramer-Wold定理,无需额外信息(如激光雷达、深度、CAD或序列数据等),从图像中标注的3D边界框中提取丰富的可定位2D监督信号。这些信号包括了投影的关键点及其相对于2D边界框中心的偏移向量。这种方法简单却有效,能够显著改善单目的3D目标识别性能。
应用场景
在自动驾驶、无人机导航、智能交通监控等领域,准确的3D物体检测至关重要。MonoCon 提供了一种优化解决方案,可以提高系统对环境的理解,特别是对于道路上的车辆、行人和其他障碍物的精确定位,从而增强系统的安全性和可靠性。
项目特点
- 创新性方法: MonoCon 利用单幅图像的标注信息,设计了新的辅助任务,发掘了潜在的2D监督信号。
- 无额外需求: 不依赖于激光雷达、深度映射或其他额外传感器的数据,降低了实际应用的成本和复杂性。
- 高性能表现: 在准确性与运行速度上超越了同类方法,适用于实时场景。
- 易于使用: 项目提供了清晰的安装指南,支持Kitti数据集的快速预处理和模型训练、测试。
为了体验 MonoCon 的强大功能,请按照项目README中的指示进行安装和数据准备,然后启动训练和评估流程。此外,项目还提供了预先训练好的模型,以便您立即开始实验。
让我们一起探索这个前沿的单目3D物体检测技术,为未来的智能驾驶铺平道路!
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







