推荐:高效大规模轨迹优化器 - Large-Scale Trajectory Optimizer
在这个快速发展的机器人和自动化领域中,精确而高效的轨迹规划至关重要。为此,我们向您推荐一个非常出色的开源项目——Large-Scale Trajectory Optimizer。这个项目可能是您能找到的最快的最小加速度或最小曲率轨迹生成器,它提供对时间分配和路径点的解析梯度,让您的优化工作更加精准。
1. 项目简介
Large-Scale Trajectory Optimizer 是一个基于完全分析结果构建的高度算法优化实现。它专注于最小化加速度(jerk)或曲率(snap),并以线性的时间和空间复杂度进行计算。只需包含两个头文件,您可以将这个模块作为一个超级高效的可微分黑盒使用。该项目源自浙江大学快实验室的研究成果,并在ICRA论文中进行了详细介绍。
2. 技术分析
项目采用了一种独特的双描述多项式方法,实现对大型轨迹的高效生成。通过JerkOpt或SnapOpt类初始化实例,然后设定段数与初始/终端条件,即可计算出满足要求的轨迹。此外,提供了generate, getObjective, getGradT, getGradInnerP等方法,方便获取目标函数、梯度信息以及轨迹数据,适用于各种优化场景。
3. 应用场景
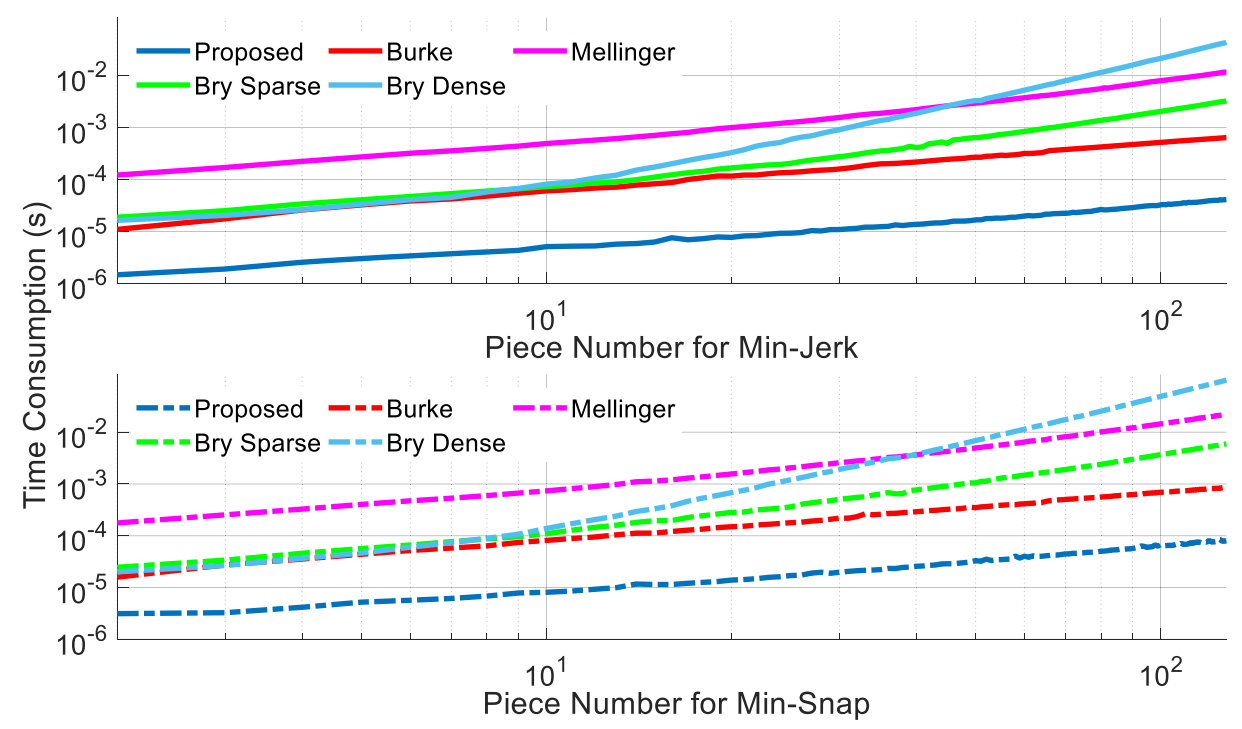
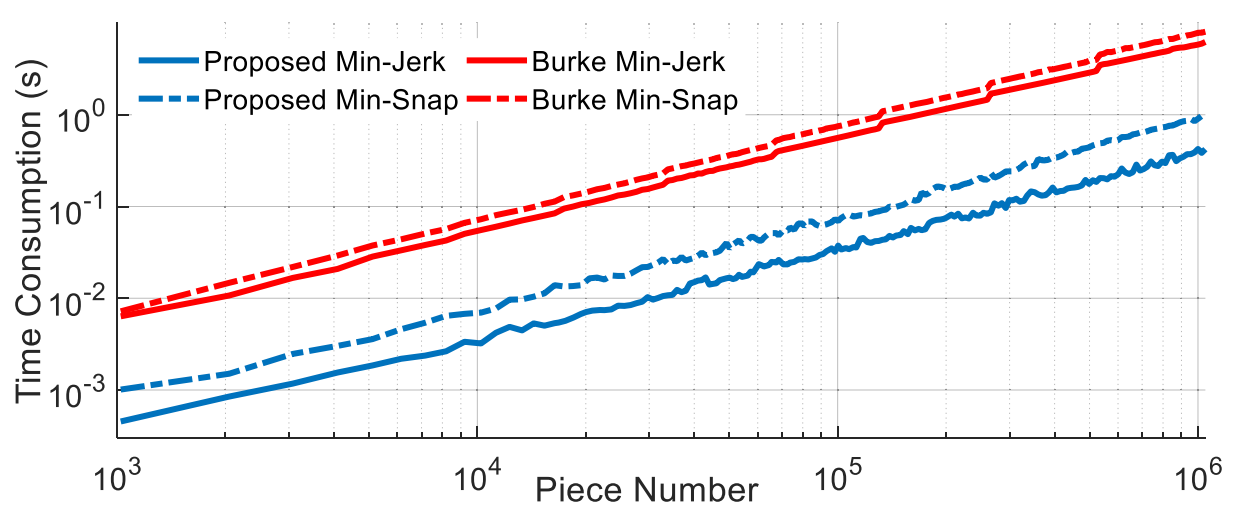
该工具特别适合于需要大规模、高精度轨迹规划的场景,如无人机自主飞行、机器人路径规划和自动驾驶等领域。示例1展示了其卓越的计算速度,而示例2则进一步展示了如何利用这个不同iable黑箱直接优化路径点和时间,从而实现高性能的大规模轨迹优化。
4. 项目特点
- 高效:基于线性时间复杂度的算法设计,使得在处理大规模轨迹优化时仍能保持高速运行。
- 简洁:仅需两个头文件,易于集成到您的项目中,作为强大的轨迹优化模块。
- 可微分:提供对时间和路径点的解析梯度,利于优化算法如梯度下降法的应用。
- 灵活性:支持自定义段数和初始/终端条件,适应不同的任务需求。
该项目已与其他四款著名的工作进行了性能对比,在中大规模任务上表现出显著优势,尤其是在处理大量数据时。
让我们一起探索并利用Large-Scale Trajectory Optimizer的强大功能,为您的项目带来更高效、更灵活的轨迹规划解决方案吧!
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







