 二叉树与AVL树详解
二叉树与AVL树详解




 本文深入探讨了二叉树的基本概念、遍历方法、搜索与删除操作,并介绍了AVL树作为自平衡二叉搜索树的原理及其实现细节。
本文深入探讨了二叉树的基本概念、遍历方法、搜索与删除操作,并介绍了AVL树作为自平衡二叉搜索树的原理及其实现细节。
二叉树
树拥有很多种结构,二叉树是树中最常用的结构,同时也是一个天然的递归结构。
二叉树拥有一个根节点,每个节点至多拥有两个子节点,分别为:左节点和右节点。树的最底部节点称之为叶节点,当一颗树的叶数量数量为满时,该树可以称之为满二叉树。
二分搜索树
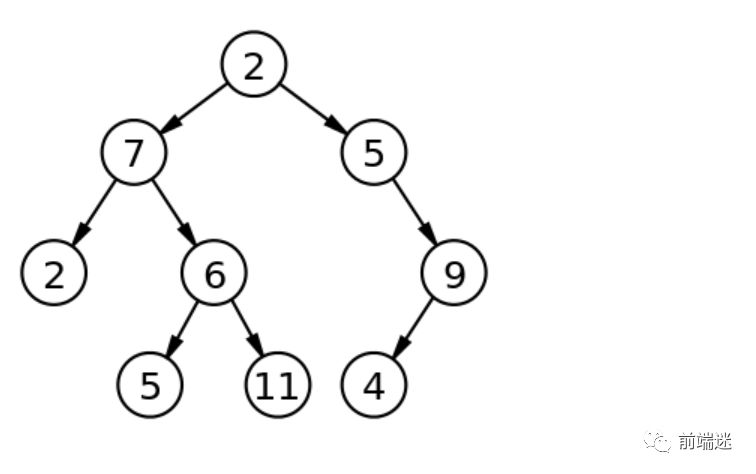
二分搜索树也是二叉树,拥有二叉树的特性。但是区别在于二分搜索树每个节点的值都比他的左子树的值大,比右子树的值小。
这种存储方式很适合于数据搜索。如下图所示,当需要查找 6 的时候,因为需要查找的值比根节点的值大,所以只需要在根节点的右子树上寻找,大大提高了搜索效率。
实现
class Node {
constructor(value) {
this.value = value
this.left = null
this.right = null
}
}
class BST {
constructor() {
this.root = null
this.size = 0
}
getSize() {
return this.size
}
isEmpty() {
return this.size === 0
}
addNode(v) {
this.root = this._addChild(this.root, v)
}
// 添加节点时,需要比较添加的节点值和当前
// 节点值的大小
_addChild(node, v) {
if (!node) {
this.size++
return new Node(v)
}
if (node.value > v) {
node.left = this._addChild(node.left, v)
} else if (node.value < v) {
node.right = this._addChild(node.right, v)
}
return node
}
}以上是最基本的二分搜索树实现,接下来实现树的遍历。
对于树的遍历来说,有三种遍历方法,分别是先序遍历、中序遍历、后序遍历。三种遍历的区别在于何时访问节点。在遍历树的过程中,每个节点都会遍历三次,分别是遍历到自己,遍历左子树和遍历右子树。如果需要实现先序遍历,那么只需要第一次遍历到节点时进行操作即可。
以下都是递归实现
// 先序遍历可用于打印树的结构 // 先序遍历先访问根节点,然后访问左节点,最后访问右节点。
preTraversal() {
this._pre(this.root)
}
_pre(node) {
if (node) {
console.log(node.value)
this._pre(node.left)
this._pre(node.right)
}
}// 中序遍历可用于排序 // 对于 BST 来说,中序遍历可以实现一次遍历就 // 得到有序的值 // 中序遍历表示先访问左节点,然后访问根节点,最后访问右节点。
midTraversal() {
this._mid(this.root)
}
_mid(node) {
if (node) {
this._mid(node.left)
console.log(node.value)
this._mid(node.right)
}
}
// 后序遍历可用于先操作子节点
// 再操作父节点的场景
// 后序遍历表示先访问左节点,然后访问右节点,最后访问根节点。
backTraversal() {
this._back(this.root)
}
_back(node) {
if (node) {
this._back(node.left)
this._back(node.right)
console.log(node.value)
}
}以上的这几种遍历都可以称之为深度遍历,对应的还有种遍历叫做广度遍历,也就是一层层地遍历树。对于广度遍历来说,我们需要利用之前讲过的队列结构来完成。
breadthTraversal() {
if (!this.root) return null
let q = new Queue()
// 将根节点入队
q.enQueue(this.root)
// 循环判断队列是否为空,为空
// 代表树遍历完毕
while (!q.isEmpty()) {
// 将队首出队,判断是否有左右子树
// 有的话,就先左后右入队
let n = q.deQueue()
console.log(n.value)
if (n.left) q.enQueue(n.left)
if (n.right) q.enQueue(n.right)
}
}接下来先介绍如何在树中寻找最小值或最大数。因为二分搜索树的特性,所以最小值一定在根节点的最左边,最大值相反
getMin() {
return this._getMin(this.root).value
}
_getMin(node) {
if (!node.left) return node
return this._getMin(node.left)
}
getMax() {
return this._getMax(this.root).value
}
_getMax(node) {
if (!node.right) return node
return this._getMin(node.right)
}向上取整和向下取整,这两个操作是相反的,所以代码也是类似的,这里只介绍如何向下取整。既然是向下取整,那么根据二分搜索树的特性,值一定在根节点的左侧。只需要一直遍历左子树直到当前节点的值不再大于等于需要的值,然后判断节点是否还拥有右子树。如果有的话,继续上面的递归判断。
floor(v) {
let node = this._floor(this.root, v)
return node ? node.value : null
}
_floor(node, v) {
if (!node) return null
if (node.value === v) return v
// 如果当前节点值还比需要的值大,就继续递归
if (node.value > v) {
return this._floor(node.left, v)
}
// 判断当前节点是否拥有右子树
let right = this._floor(node.right, v)
if (right) return right
return node
}排名,这是用于获取给定值的排名或者排名第几的节点的值,这两个操作也是相反的,所以这个只介绍如何获取排名第几的节点的值。对于这个操作而言,我们需要略微的改造点代码,让每个节点拥有一个 size 属性。该属性表示该节点下有多少子节点(包含自身)。
class Node {
constructor(value) {
this.value = value
this.left = null
this.right = null
// 修改代码
this.size = 1
}
}
// 新增代码
_getSize(node) {
return node ? node.size : 0
}
_addChild(node, v) {
if (!node) {
return new Node(v)
}
if (node.value > v) {
// 修改代码
node.size++
node.left = this._addChild(node.left, v)
} else if (node.value < v) {
// 修改代码
node.size++
node.right = this._addChild(node.right, v)
}
return node
}
select(k) {
let node = this._select(this.root, k)
return node ? node.value : null
}
_select(node, k) {
if (!node) return null
// 先获取左子树下有几个节点
let size = node.left ? node.left.size : 0
// 判断 size 是否大于 k
// 如果大于 k,代表所需要的节点在左节点
if (size > k) return this._select(node.left, k)
// 如果小于 k,代表所需要的节点在右节点
// 注意这里需要重新计算 k,减去根节点除了右子树的节点数量
if (size < k) return this._select(node.right, k - size - 1)
return node
}接下来讲解的是二分搜索树中最难实现的部分:删除节点。因为对于删除节点来说,会存在以下几种情况
需要删除的节点没有子树 需要删除的节点只有一条子树 需要删除的节点有左右两条树 对于前两种情况很好解决,但是第三种情况就有难度了,所以先来实现相对简单的操作:删除最小节点,对于删除最小节点来说,是不存在第三种情况的,删除最大节点操作是和删除最小节点相反的,所以这里也就不再赘述。
delectMin() {
this.root = this._delectMin(this.root)
console.log(this.root)
}
_delectMin(node) {
// 一直递归左子树
// 如果左子树为空,就判断节点是否拥有右子树
// 有右子树的话就把需要删除的节点替换为右子树
if ((node != null) & !node.left) return node.right
node.left = this._delectMin(node.left)
// 最后需要重新维护下节点的 `size`
node.size = this._getSize(node.left) + this._getSize(node.right) + 1
return node
}最后讲解的就是如何删除任意节点了。对于这个操作,T.Hibbard 在 1962 年提出了解决这个难题的办法,也就是如何解决第三种情况。
当遇到这种情况时,需要取出当前节点的后继节点(也就是当前节点右子树的最小节点)来替换需要删除的节点。然后将需要删除节点的左子树赋值给后继结点,右子树删除后继结点后赋值给他。
你如果对于这个解决办法有疑问的话,可以这样考虑。因为二分搜索树的特性,父节点一定比所有左子节点大,比所有右子节点小。那么当需要删除父节点时,势必需要拿出一个比父节点大的节点来替换父节点。这个节点肯定不存在于左子树,必然存在于右子树。然后又需要保持父节点都是比右子节点小的,那么就可以取出右子树中最小的那个节点来替换父节点。
delect(v) {
this.root = this._delect(this.root, v)
}
_delect(node, v) {
if (!node) return null
// 寻找的节点比当前节点小,去左子树找
if (node.value < v) {
node.right = this._delect(node.right, v)
} else if (node.value > v) {
// 寻找的节点比当前节点大,去右子树找
node.left = this._delect(node.left, v)
} else {
// 进入这个条件说明已经找到节点
// 先判断节点是否拥有拥有左右子树中的一个
// 是的话,将子树返回出去,这里和 `_delectMin` 的操作一样
if (!node.left) return node.right
if (!node.right) return node.left
// 进入这里,代表节点拥有左右子树
// 先取出当前节点的后继结点,也就是取当前节点右子树的最小值
let min = this._getMin(node.right)
// 取出最小值后,删除最小值
// 然后把删除节点后的子树赋值给最小值节点
min.right = this._delectMin(node.right)
// 左子树不动
min.left = node.left
node = min
}
// 维护 size
node.size = this._getSize(node.left) + this._getSize(node.right) + 1
return node
}AVL 树
概念
二分搜索树实际在业务中是受到限制的,因为并不是严格的 O(logN),在极端情况下会退化成链表,比如加入一组升序的数字就会造成这种情况。
AVL 树改进了二分搜索树,在 AVL 树中任意节点的左右子树的高度差都不大于 1,这样保证了时间复杂度是严格的 O(logN)。基于此,对 AVL 树增加或删除节点时可能需要旋转树来达到高度的平衡。
实现
因为 AVL 树是改进了二分搜索树,所以部分代码是于二分搜索树重复的,对于重复内容不作再次解析。
对于 AVL 树来说,添加节点会有四种情况
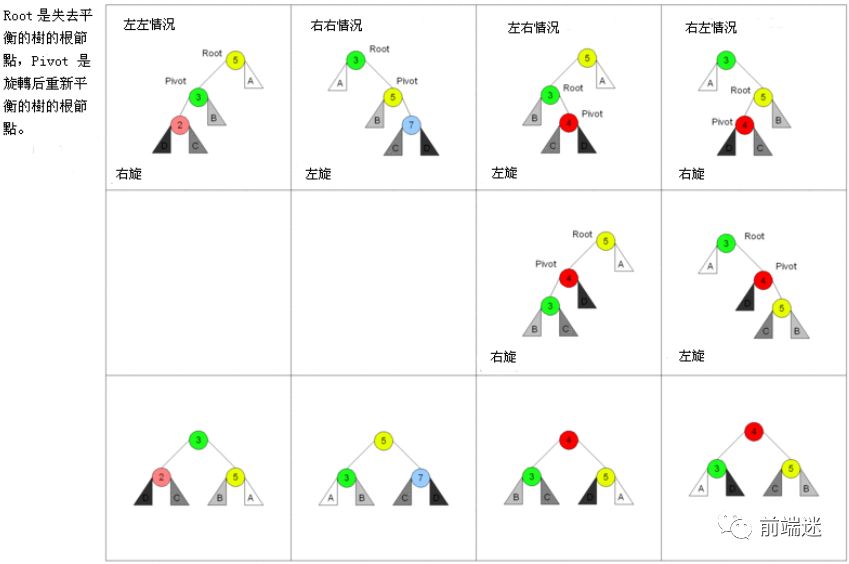
对于左左情况来说,新增加的节点位于节点 2 的左侧,这时树已经不平衡,需要旋转。因为搜索树的特性,节点比左节点大,比右节点小,所以旋转以后也要实现这个特性。
旋转之前:new < 2 < C < 3 < B < 5 < A,右旋之后节点 3 为根节点,这时候需要将节点 3 的右节点加到节点 5 的左边,最后还需要更新节点的高度。
对于右右情况来说,相反于左左情况,所以不再赘述。
对于左右情况来说,新增加的节点位于节点 4 的右侧。对于这种情况,需要通过两次旋转来达到目的。
首先对节点的左节点左旋,这时树满足左左的情况,再对节点进行一次右旋就可以达到目的。
class Node {
constructor(value) {
this.value = value
this.left = null
this.right = null
this.height = 1
}
}
class AVL {
constructor() {
this.root = null
}
addNode(v) {
this.root = this._addChild(this.root, v)
}
_addChild(node, v) {
if (!node) {
return new Node(v)
}
if (node.value > v) {
node.left = this._addChild(node.left, v)
} else if (node.value < v) {
node.right = this._addChild(node.right, v)
} else {
node.value = v
}
node.height =
1 + Math.max(this._getHeight(node.left), this._getHeight(node.right))
let factor = this._getBalanceFactor(node)
// 当需要右旋时,根节点的左树一定比右数高度高
if (factor > 1 && this._getBalanceFactor(node.left) >= 0) {
return this._rightRotate(node)
}
// 当需要左旋时,根节点的左树一定比右数高度矮
if (factor < -1 && this._getBalanceFactor(node.right) <= 0) {
return this._leftRotate(node)
}
// 左右情况
// 节点的左树比右树高,且节点的左树的右数比节点的左树的左树高
if (factor > 1 && this._getBalanceFactor(node.left) < 0) {
node.left = this._leftRotate(node.left)
return this._rightRotate(node)
}
// 右左情况
// 节点的左树比右树矮,且节点的右树的右数比节点的右树的左树矮
if (factor < -1 && this._getBalanceFactor(node.right) > 0) {
node.right = this._rightRotate(node.right)
return this._leftRotate(node)
}
return node
}
_getHeight(node) {
if (!node) return 0
return node.height
}
_getBalanceFactor(node) {
return this._getHeight(node.left) - this._getHeight(node.right)
}
// 节点右旋
// 5 2
// / \ / \
// 2 6 ==> 1 5
// / \ / / \
// 1 3 new 3 6
// /
// new
_rightRotate(node) {
// 旋转后新根节点
let newRoot = node.left
// 需要移动的节点
let moveNode = newRoot.right
// 节点 2 的右节点改为节点 5
newRoot.right = node
// 节点 5 左节点改为节点 3
node.left = moveNode
// 更新树的高度
node.height =
1 + Math.max(this._getHeight(node.left), this._getHeight(node.right))
newRoot.height =
1 +
Math.max(this._getHeight(newRoot.left), this._getHeight(newRoot.right))
return newRoot
}
// 节点左旋
// 4 6
// / \ / \
// 2 6 ==> 4 7
// / \ / \ \
// 5 7 2 5 new
// \
// new
_leftRotate(node) {
// 旋转后新根节点
let newRoot = node.right
// 需要移动的节点
let moveNode = newRoot.left
// 节点 6 的左节点改为节点 4
newRoot.left = node
// 节点 4 右节点改为节点 5
node.right = moveNode
// 更新树的高度
node.height =
1 + Math.max(this._getHeight(node.left), this._getHeight(node.right))
newRoot.height =
1 +
Math.max(this._getHeight(newRoot.left), this._getHeight(newRoot.right))
return newRoot
}
}
相关阅读:

















 1801
1801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









