




 文章详细介绍了如何基于PM3003S激光粉尘传感器设计和实现驱动程序,包括对象定义、初始化、读取测量结果、启停粉尘仪、操作粉尘系数和读取编码等功能,并提供了在STM32平台上使用驱动的示例。
文章详细介绍了如何基于PM3003S激光粉尘传感器设计和实现驱动程序,包括对象定义、初始化、读取测量结果、启停粉尘仪、操作粉尘系数和读取编码等功能,并提供了在STM32平台上使用驱动的示例。
空气质量是现代日常生活中人们所关注的事情,也是生存环境好坏的一种体现。其中粉尘数量监测更是空气质量检测中最常见的对象,在我们的检测设备中也经常会有这种需求。检测手段也是多种多样,这一篇中,我们就来讨论使用PM3003S 激光粉尘传感器实现粉尘测量。
1、功能概述
PM3003S 激光粉尘传感器模块采用光学散射原理,可精确检测并计算单位体积内空气中不同粒径的悬浮颗粒物的个数,内置四方独有的尘源智能识别,配以流量稳定的气泵,可实现颗粒物PM1.0、PM2.5、PM10、TSP质量浓度的实时输出。
PM3003S 激光粉尘传感器模块接口采用TTL电平。通讯报文包括起始符、长度、命令符、数据以及校验和。具体的数据格式如下。

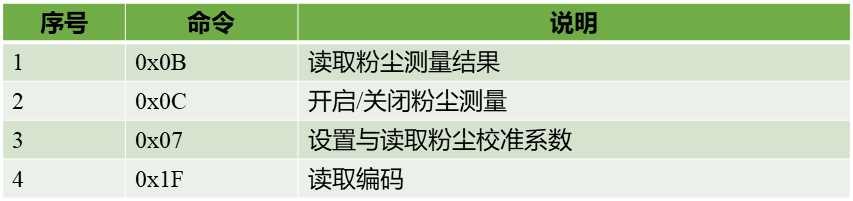
PM3003S 激光粉尘传感器模块有4中命令:读取粉尘仪测量结果,功能码0x0B;开启或关闭粉尘仪测量,功能码0x0C;读取或读取粉尘仪校准系数,功能码0x07;读取粉尘仪编码,功能码0x1F。具体如下表;
PM3003S 激光粉尘传感器模块具有6个通道,可以输出PM10,PM2.5,PM1.0以及TSP等。
2、驱动设计与实现
PM3003S 激光粉尘传感器模块驱动的设计我们依然采用基于对象的方式来实现。在实现之前,我们需要考虑一下PM3003S 激光粉尘传感器模块对象的具体内容。
2.1、对象定义
首先我们需要考虑对象类型的定义。关于PM3003S 激光粉尘传感器模块对象我们从对象的属性及方法两个方面来考虑。
对于PM3003S 激光粉尘传感器模块的属性,其6个通道的粉尘测量值,状态值、报警值、PM1.0、PM2.5、PM10以及TSP等表示了PM3003S 激光粉尘传感器模块的工作状态,多以我们将其设定为属性。同样的矫正系数表示PM3003S 激光粉尘传感器模块的配置状态、传感器编码标识了PM3003S 激光粉尘传感器模块的唯一性,我们也将其设计为属性。
再来看PM3003S 激光粉尘传感器模块的方法。在这里我们并不实现PM3003S 激光粉尘传感器模块对象的全部方法,我们只考虑哪些对具体平台依赖性较大的方法。对于PM3003S 激光粉尘传感器模块只有读写操作是与平台相关的,所以我们将其作为对象的方法。于是我们可以设计PM3003S 激光粉尘传感器模块对象类型如下:
/*定义PM3003S对象类型*/
typedef struct PM3003S {
uint8_t status;
uint8_t alarm;
uint16_t sensorCode[5];
uint32 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









