




 文章讲述了在遇到从-targetaarch64-linux-android21升级到-targetaarch64-linux-android24时遇到的问题。主要问题是由于stdout,stdin,stderr在Android23之后才被实现。通过修改QT配置,将默认的21改为24,成功解决了编译问题。
文章讲述了在遇到从-targetaarch64-linux-android21升级到-targetaarch64-linux-android24时遇到的问题。主要问题是由于stdout,stdin,stderr在Android23之后才被实现。通过修改QT配置,将默认的21改为24,成功解决了编译问题。
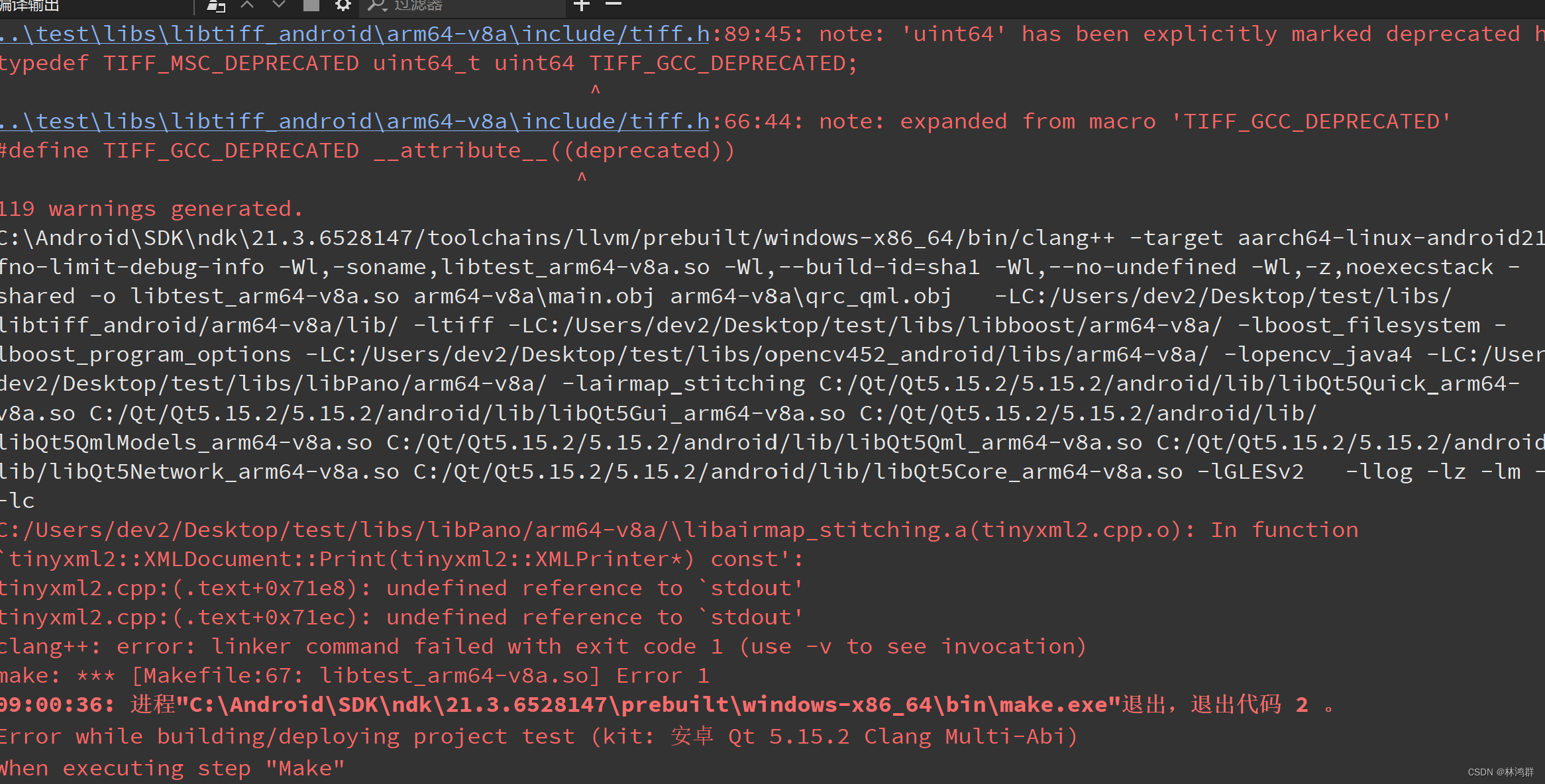
-target aarch64-linux-android21 ===> -target aarch64-linux-android24 问题解决
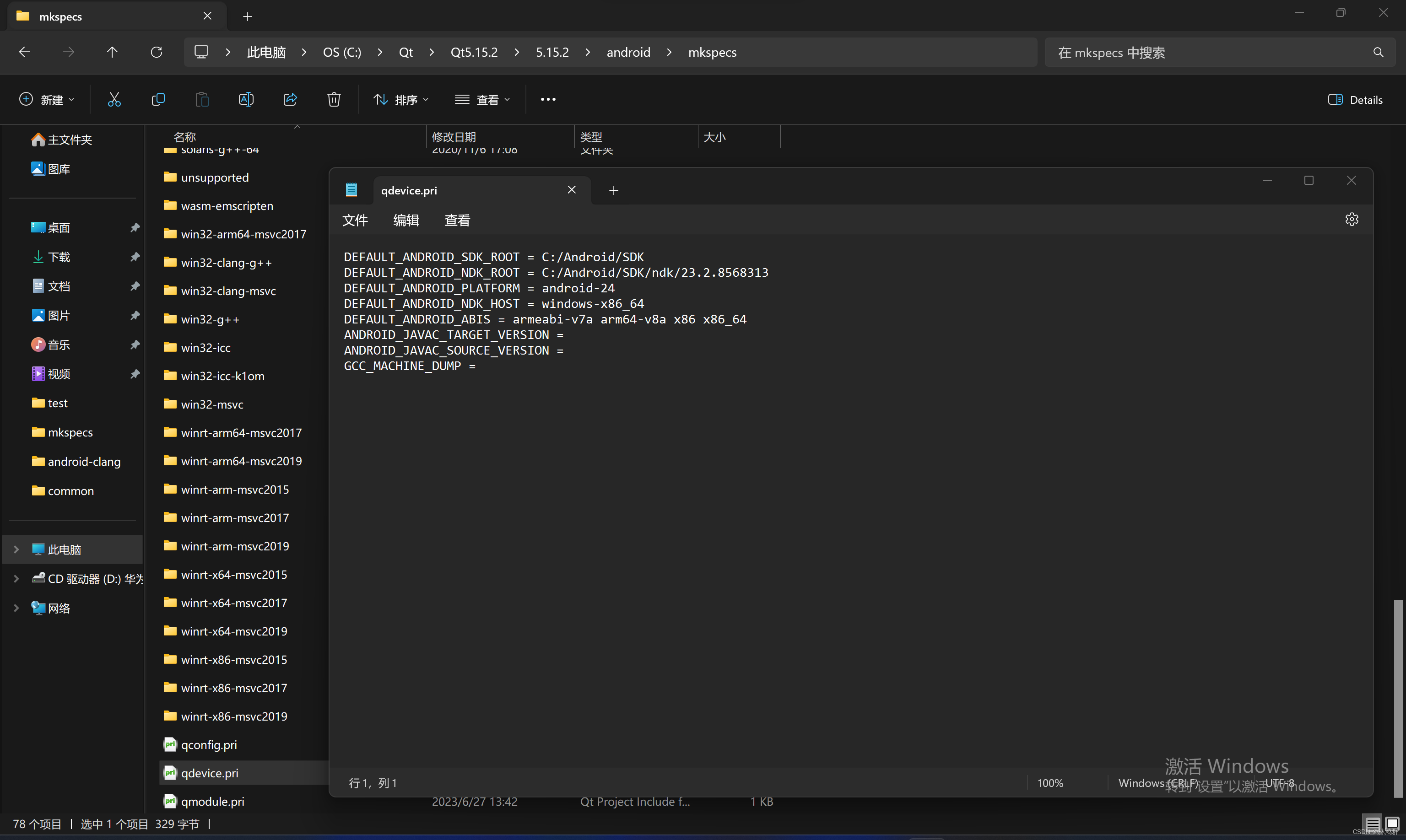
修改QT配置,默认为21改为24 ,因为stdout stdin stderr 在android23之后才实现
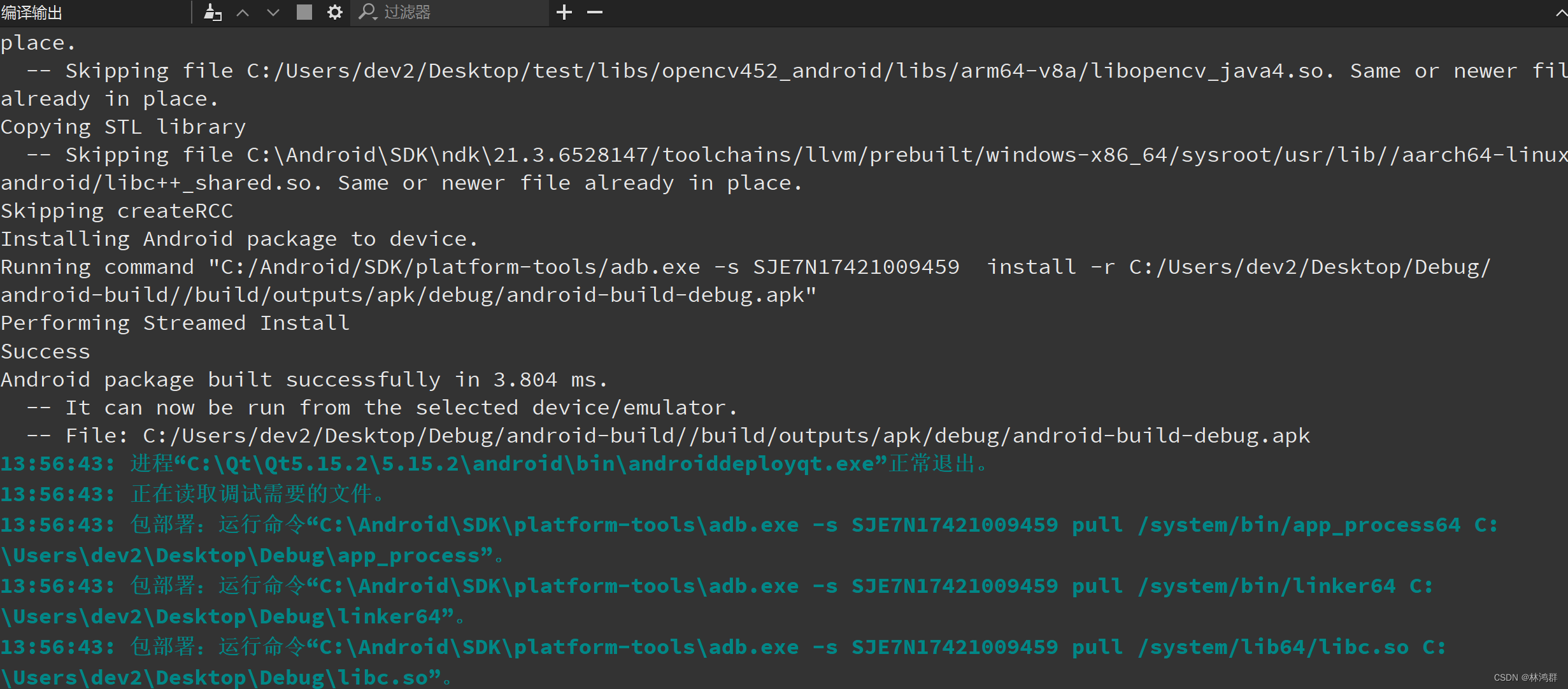
编译成功,问题解决
-target aarch64-linux-android21 ===> -target aarch64-linux-android24 问题解决
修改QT配置,默认为21改为24 ,因为stdout stdin stderr 在android23之后才实现
编译成功,问题解决
 8206
2万+
8206
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






























