




 本文介绍了一道名为‘秘密通道’的问题,涉及一副包含墙、起点、终点和空地的地图。主角可以移动、发射子弹创建秘密通道以及通过通道。任务是求出从起点到终点的最短时间。给出了使用SPFA算法解决此问题的思路,以及错误示例和正确解题方法。
本文介绍了一道名为‘秘密通道’的问题,涉及一副包含墙、起点、终点和空地的地图。主角可以移动、发射子弹创建秘密通道以及通过通道。任务是求出从起点到终点的最短时间。给出了使用SPFA算法解决此问题的思路,以及错误示例和正确解题方法。
problem
Description
有一副n*m的地图,有n*m块地,每块是下列四种中的一种:
墙:用#表示,墙有4个面,分别是前面,后面,左面,右面。
起点:用C表示,为主角的起点,是一片空地。
终点:用F表示,为主角的目的地,是一片空地。
空地:用 . 表示。
其中除了墙不能穿过,其他地方都能走。
主角有以下3种操作:
1.移动到相邻的前后左右的地方,花费一个单位时间。
2.向前后左右其中一个方向发射子弹,子弹沿直线穿过,打在最近的一堵墙的一面,然后墙的这面就会形成一个开口通往秘密通道。同一时间最多只能有两个开口,若出现有3个开口,出现时间最早的开口会立即消失。该操作不用时间。
3.可以从一个与开口相邻的空地跳进去,进入秘密通道,从另外一个开口正对的空地跳出来。这个过程花费一个单位时间。
地图四周都是墙,问主角最少用多少时间从C走到F。C和F
只会出现一次。
Input
第一行输入两个正整数n,m。
接下来n行,每行m个字符描述地图。
Output
输出1个整数,表示最短时间完成路途。如果无解输出nemoguce
Sample Input
Input 1
4 4
#
.F
C.
#
Input 2
6 8
#
.##..F
C.##..
..#…
…..
#
Input 3
4 5
#
C#.
F
#
Sample Output
Output 1
2
Output 2
4
Output 3
nemoguce
Data Constraint
对于50%的数据,4≤ n,m≤ 15。
对于100%的数据,4≤ n,m≤ 500。
Hint
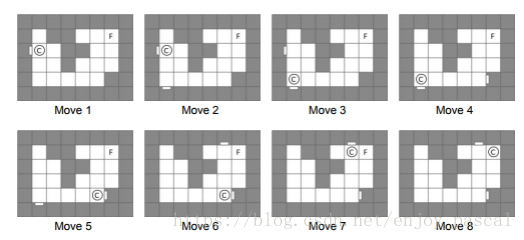
总共用到8次操作,时间之和为4。如下图所示
1.向左射一枪,在(3,1)的右面出现开口。
2.向下射一枪,在(6,2)的上面出现开口。
3.向左从(3,1)进入秘密通道,从(6,2)中出来,到达(5,2)。用1单位时间。
4.向右射一枪,在(5,7)的左面出现开口,(3,1)右面的开口消失。
5.走进(6,2)的开口,出来到(5,6)。用1单位时间。
6.向上射一枪,在(1,6)的下面出现开口。
7.经过秘密通道,走到(2,6)。用1单位时间。
8.走到终点。用1单位时间。
analysis
正解SPFA……考场写了我3h的bfs
真是沙雕对于每个点两种连边方式
一种是上下左右连通的点,边权为11
一种是找到离上下左右最近的那堵墙,设距离为 ,向最近的墙连边权为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3452
3452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









