







 本文介绍了一种解决外星人操控路径问题的算法。该算法通过预先对关键点进行排序,然后使用二分查找来快速确定每个指令后的下一个位置。时间复杂度为O((n+m)log2n),适用于大量关键点的场景。
本文介绍了一种解决外星人操控路径问题的算法。该算法通过预先对关键点进行排序,然后使用二分查找来快速确定每个指令后的下一个位置。时间复杂度为O((n+m)log2n),适用于大量关键点的场景。
description
有一个外星人控制了你的大脑。一开始你处于原点(0,0)。外星人有一个由(R,U,D,L)组成的长度为M 的操作序列,分别代表(右,上,下,左)。
平面上有N 个关键点,每当外星人给出一个操作,你需要在这个方向上找到最近的一个关键点,并走到那个点上。保证输入数据合法。
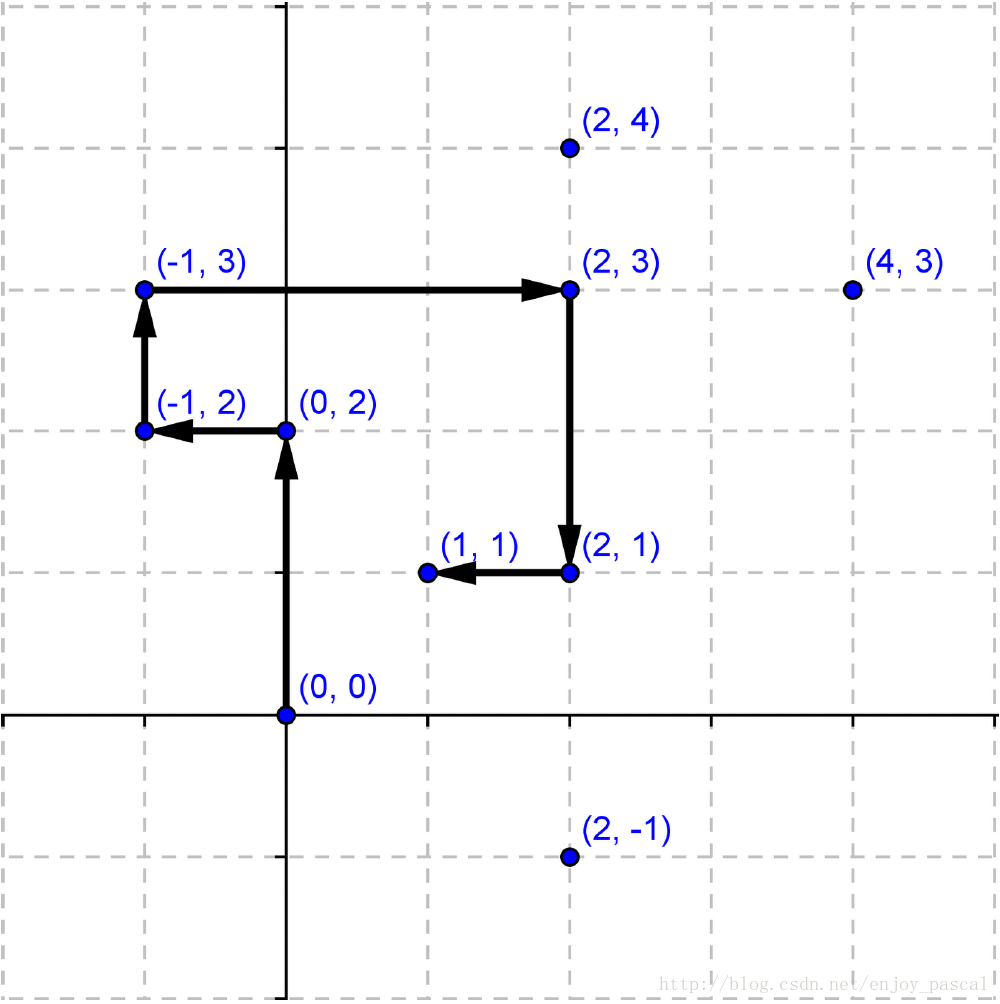
上图为第三个样例的图示。
analysis
-
思路比较好想,虽说nnn很大,但是我们可以先排个序
-
a,ba,ba,b分别快排一次,aaa按横坐标升序排序,bbb则相反
-
如果为向上或向下,那么在aaa里二分找出当前点(快排前把(0,0)(0,0)(0,0)也丢进去)
-
找出当前点nownownow后,若为upupup,下一个点即为a[now+1]a[now+1]a[now+1]
-
为downdowndown,下一个点即为a[now−1]a[now-1]a[now−1]
-
题目保证数据合法,可以免了判断
-
左右就在bbb里二分找当前点,同理
-
时间复杂度O((n+m)log2n)O((n+m)log_2n)O((n+m)log2n)
code
var
a,b:array[0..100000,0..2]of longint;
n,m,i,j,l,r,mid,nowx,nowy:longint;
ch:char;
procedure qsort1(l,r:longint);
var
i,j,mid,mid1:longint;
begin
i:=l;
j:=r;
mid:=a[(l+r)shr 1,1];
mid1:=a[(l+r)shr 1,2];
repeat
while (a[i,1]<mid)or(a[i,1]=mid)and(a[i,2]<mid1)do inc(i);
while (a[j,1]>mid)or(a[j,1]=mid)and(a[j,2]>mid1)do dec(j);
if i<=j then
begin
a[0]:=a[i];
a[i]:=a[j];
a[j]:=a[0];
inc(i);
dec(j);
end;
until i>j;
if l<j then qsort1(l,j);
if i<r then qsort1(i,r);
end;
procedure qsort2(l,r:longint);
var
i,j,mid,mid1:longint;
begin
i:=l;
j:=r;
mid:=b[(l+r)shr 1,2];
mid1:=b[(l+r)shr 1,1];
repeat
while (b[i,2]<mid)or(b[i,2]=mid)and(b[i,1]<mid1)do inc(i);
while (b[j,2]>mid)or(b[j,2]=mid)and(b[j,1]>mid1)do dec(j);
if i<=j then
begin
b[0]:=b[i];
b[i]:=b[j];
b[j]:=b[0];
inc(i);
dec(j);
end;
until i>j;
if l<j then qsort2(l,j);
if i<r then qsort2(i,r);
end;
begin
assign(input,'tratincice.in');reset(input);
assign(output,'tratincice.out');rewrite(output);
readln(n,m);
for i:=1 to n do
begin
for j:=1 to 2 do
begin
read(a[i,j]);
b[i,j]:=a[i,j];
end;
readln;
end;
qsort1(1,n);
qsort2(1,n);
for i:=1 to m do
begin
read(ch);
if ch in['U','D'] then
begin
l:=1;
r:=n;
while l<=r do
begin
mid:=(l+r)shr 1;
if (a[mid,1]>nowx)or(a[mid,1]=nowx)and(a[mid,2]>nowy)then
r:=mid-1
else l:=mid+1;
end;
if ch='U' then
begin
nowx:=a[r+1,1];
nowy:=a[r+1,2];
end
else
begin
nowx:=a[r-1,1];
nowy:=a[r-1,2];
end;
end
else
begin
l:=1;
r:=n;
while l<=r do
begin
mid:=(l+r)shr 1;
if (b[mid,2]>nowy)or(b[mid,2]=nowy)and(b[mid,1]>nowx)then
r:=mid-1
else l:=mid+1;
end;
if ch='R' then
begin
nowx:=b[r+1,1];
nowy:=b[r+1,2];
end
else
begin
nowx:=b[r-1,1];
nowy:=b[r-1,2];
end;
end;
end;
writeln(nowx,' ',nowy);
close(input);close(output);
end.

















 159
159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









