



 文章对比了指数基金和高股息组合投资。指数基金简单,投资者可获接近指数收益,但分红不稳定,选股标准死板。高股息组合能保证分红,可规避部分风险,综合回报高。建议普通人采用电脑筛选+人为筛选构建高股息组合,可跨市场选择。
文章对比了指数基金和高股息组合投资。指数基金简单,投资者可获接近指数收益,但分红不稳定,选股标准死板。高股息组合能保证分红,可规避部分风险,综合回报高。建议普通人采用电脑筛选+人为筛选构建高股息组合,可跨市场选择。
1、指数基金有许多优点,适合大多数人。首先它足够简单,有许多对应的产品。基金公司收取一定的费用,帮投资者构建指数组合。投资者可以获得接近指数的收益。不用自己研究具体企业。以收费相当厚道的华夏基金沪深300ETF为例,一年收费是0.6%,在国内算非常低了。
2、指数基金如果收到公司的分红,有多余的就会分给投资者。没有多余的就不分。所以分红并不那么稳定。而,红利指数基金一般都会有多余,因此一般也都有分红。什么叫有多余的?指数基金目标是保持和指数走势一样。分红后,指数除权,基金多了一笔钱,但是有时候有跟踪误差,也许不如指数,那么就要拿红利来补偿上这个误差再说。同时,应当也要扣除0.6%的费率。再剩下的,就叫多余的,此时会分给基金持有人。
3、因此,如果一个指数基金统计出来股息率是4%,已经算不低了,但是扣除0.6%费率,那么剩下3.4%,分红少了0.6/4=15%。这就是你为基金公司的服务付出的代价。
4、同时,指数基金的规则是个双刃剑。一面是有特定的规则,避免了基金经理头脑发热。另一面是死板的选股标准,会把一时风光的企业选进来。比如之前沪深300纳入乐视网,或一些红利指数纳入暂时高分红的企业。都是指数基金的硬伤。
5、一组高股息策略,总体而言是由于指数基金的。也优于红利指数基金。但是也有缺点:
a、用股票账户买入一组高股息企业,可以保证企业分红多少你就能拿到多少,比如组合股息率4%,你就能切实的拿到4%,而同样的股息率换到指数基金会少15%,只能拿到3.4%,因为基金公司收走了0.6%的费用。
b、一组高股息策略,可以人为排除仅仅最近一两年高分红的企业,而选择有持续分红历史的企业,规避掉一些坑。但是这需要人为干预。
c、高股息组合,保证了你不管牛市,熊市每年都能有现金流入。当前就是熊市,大家更加能感受到如果有稳稳的现金分红是多么踏实。
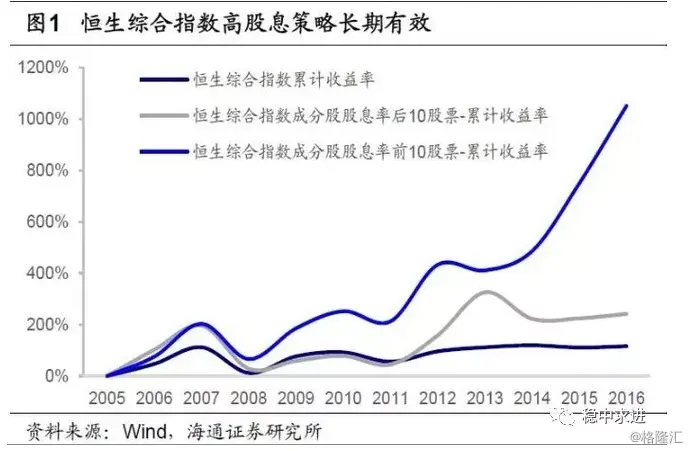
d、高股息组合的综合回报高于整体市场,也高于沪深300这种蓝筹指数。在估值低的地方,高股息组合因为分红再投,威力更大,远远的甩开指数。比如下面图示,蓝色线是高股息组合,远远领先于恒生指数:
6、因此,普通人更加应该采取高股息组合的投资方式。现在网络发达,要帅选出高股息组合是很容易的,比如@萝卜投研 提供的工具,可以直接用股息>5%作为筛选条件,瞬间获取市场所有股息率大于5%的企业,然后再人为过一遍,去掉明显的坑,剩下的构建一个组合。这样的组合肯定是会明显优于平均的。

7、比较好的构建高股息组合的策略,就是电脑筛选+人为筛选,双管齐下。就如我构建的高股息组合,一家一家的看,仅留下个人认为最有把握,股息最具持续性的一组企业。这样的高股息组合让人踏实,值得期待。
8、高股息组合肯定要以尽量获得更高股息为目标,自然不应该局限于某个市场。,A股,港股,B股都是可供选择的地方。暂时来说目前B股和港股是这个策略最好的应用地方。长期的低估,相对冷门的市场,为高股息组合的构建提供了绝佳的环境。当前在A股构建一个可持续的5%以上股息率的组合,即使在目前熊市都不易;在香港+B股,可以轻松构建股息率超过7%的组合,何乐而不为?
作者:大只若鱼
来源:稳中求进

















 9038
9038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









