



无人驾驶多传感器感知融合常用的算法是卡尔曼滤波,卡尔曼滤波器一种最优化的递归数字处理算法,利用线性方程,通过观测系统输入输出,对系统状态进行估计的一种算法,为什么我们不直接选择系统真实观测值,是因为真实系统存在噪声,无法直接利用观测值,除此以外,如果出现异常等导致没有观测值输出,对于实时性要求较高的场景,会造成严重的问题。那为什么不利用状态估计值输出那?这个比较好理解,状态估计的结果是计算出来的,那就需要构建计算模型,事实上很难构建出一个完美的模型去表达输入输出的关系,卡尔曼滤波就是解决这些问题的,将状态估计值和观测值结合起来,去逼近真实值,接下来详细讲述。

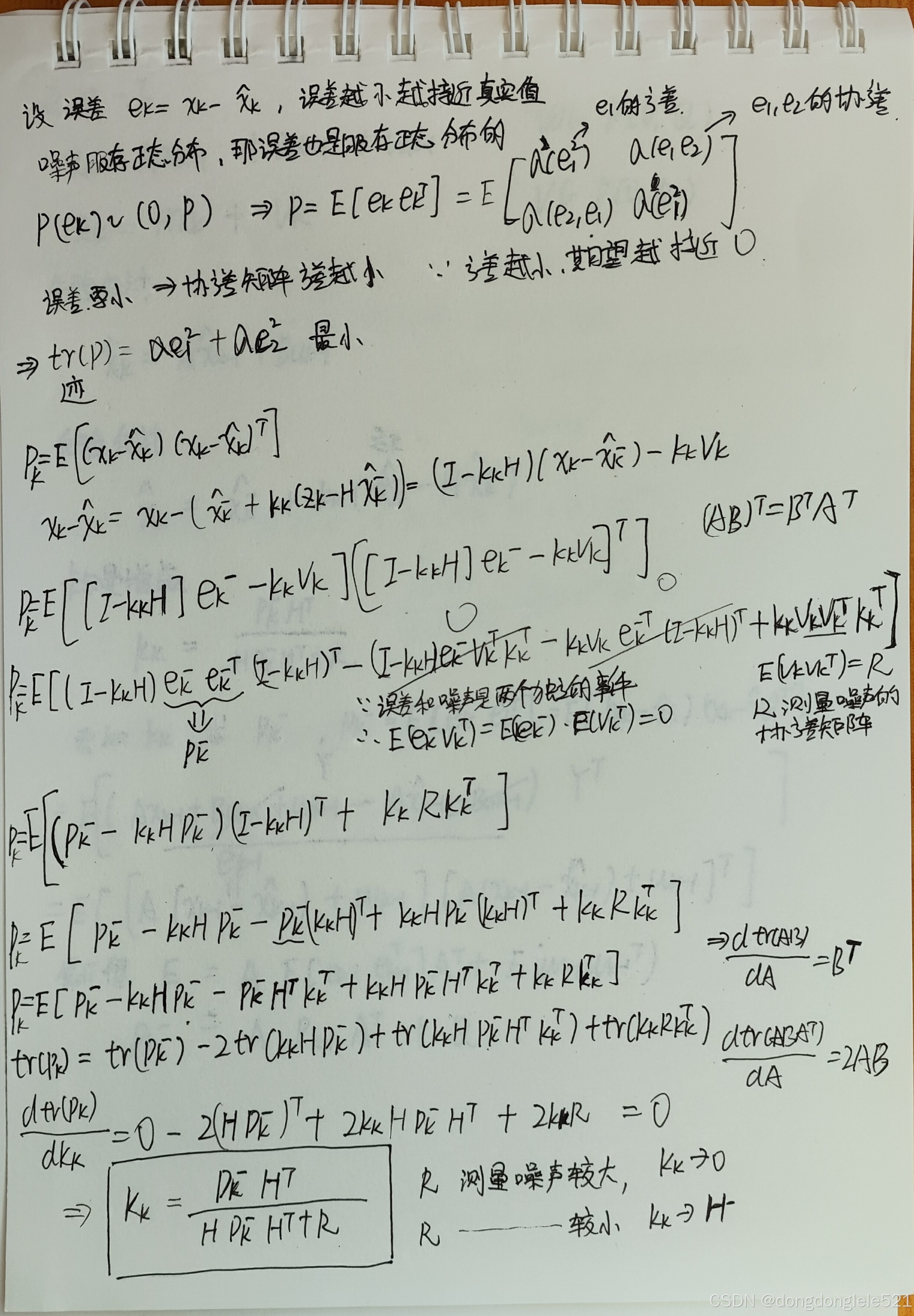
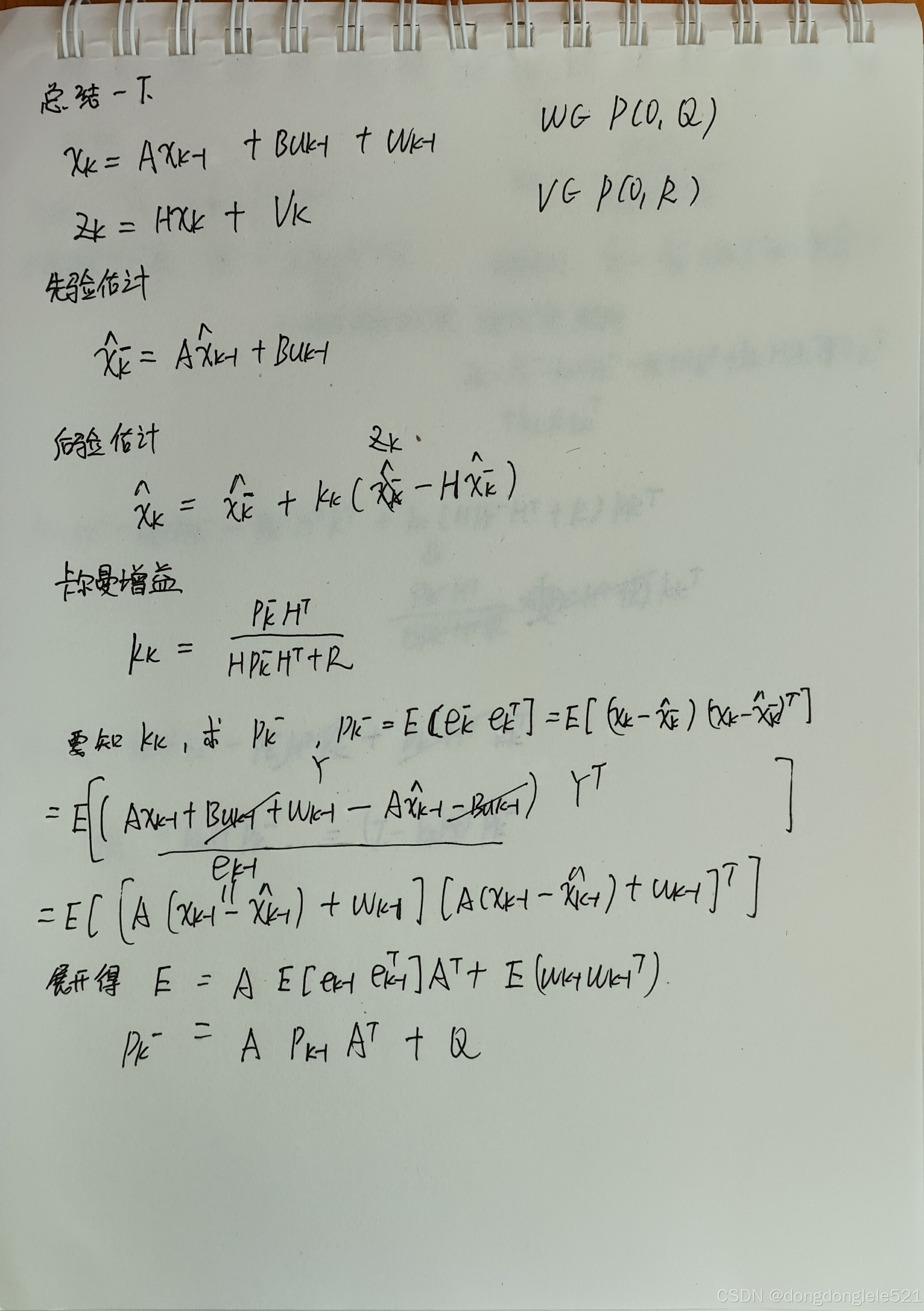
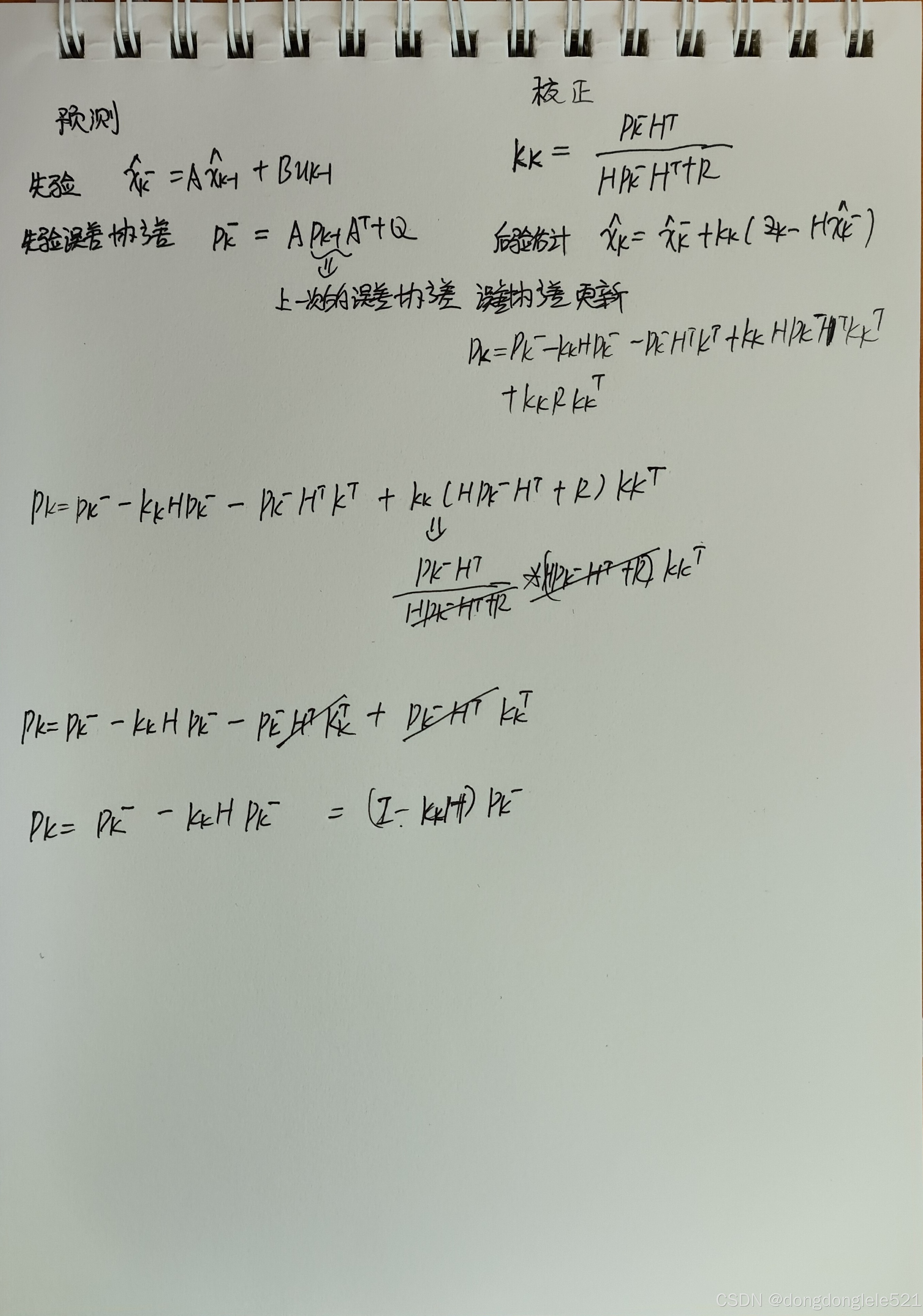
公式推导完毕,从上述公式我们明白,能用卡尔曼滤波解决问题的前提条件:
1.系统可以用线性方程进行建模。
2.噪声是服从正态分布的。
已经了解了卡尔曼滤波的工作原理,那怎样将它应用在多传感器感知融合上那?
首先,必须明白为什么进行多传感器感知融合,因为每种传感器都有各自的优缺点,利用一种传感器的感知结果供下游PNC以及全局调度的置信度非常低,所以要结合不同传感器的优缺点进行融合。
激光雷达输出的感知结果包含:激光雷达AI检测结果、激光雷达传统点云聚类后的结果、毫米波雷达感知结果、图像AI识别结果、通信结果。每种感知结果都会在不同程度上存在误检、漏检的问题,应用卡尔曼滤波可以降低不同感知结果的噪声,将降噪后的结果,在根据实际的场景进行匹配融合,那每种感知结果怎么样进行卡尔曼滤波,不同的结果怎样进行匹配融合,接下来的博客将一一进行分析。

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









