




 本文探讨了STM32F4系列CPU开启CCM后对内存分配的影响,指出CCM不属于总线矩阵,导致原本分配至SRAM的变量被移至CCM区域,影响DMA等硬件访问。文章提供了将特定变量强制分配回SRAM的方法。
本文探讨了STM32F4系列CPU开启CCM后对内存分配的影响,指出CCM不属于总线矩阵,导致原本分配至SRAM的变量被移至CCM区域,影响DMA等硬件访问。文章提供了将特定变量强制分配回SRAM的方法。
当STM32F4系列的CPU打开CCM后,编译器具有优先分配的内存的权限,CCM不属于总线矩阵,所有很多原来分配到SRAM的变量都会移到这个区域,造成需要硬件访问的内存区域都不能访问,例如DMA,SEGGER RTT,所以需要强制这些变量分配在SRAM中
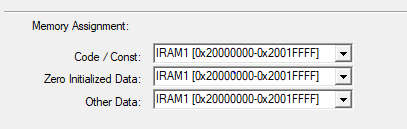
将需要的文件编译强制分配在指定内存区域
或使用关键字将指定的变量分配在指定的地址__attribute__((at(DMA_START_ADDR)));
segger RTT当STM32打开CCM后不能使用的问题
于 2019-01-14 11:48:53 首次发布


















 5137
5137

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











